
电动轮椅及其控制方法.pdf

涵蓄****09

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动轮椅及其控制方法.pdf
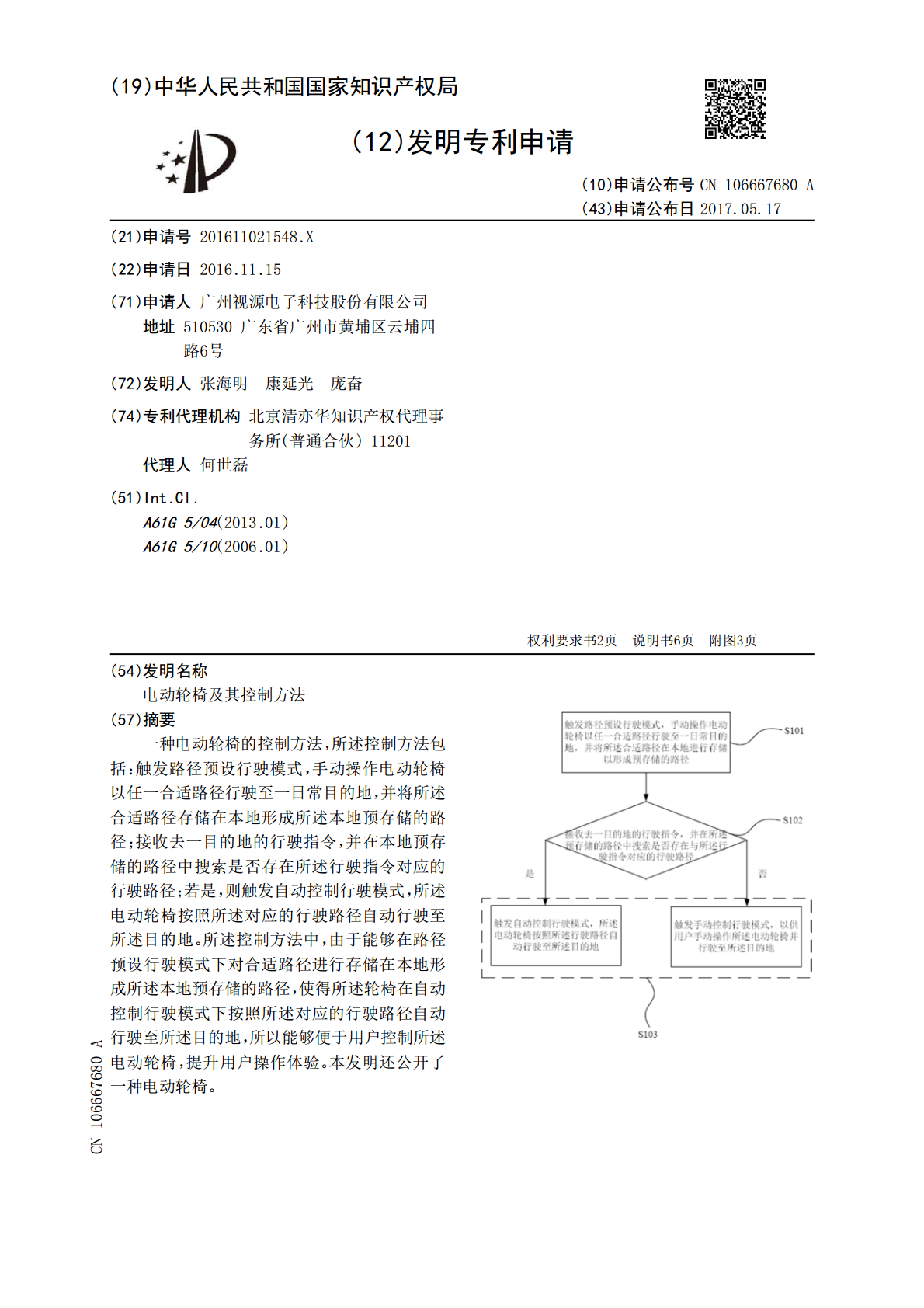
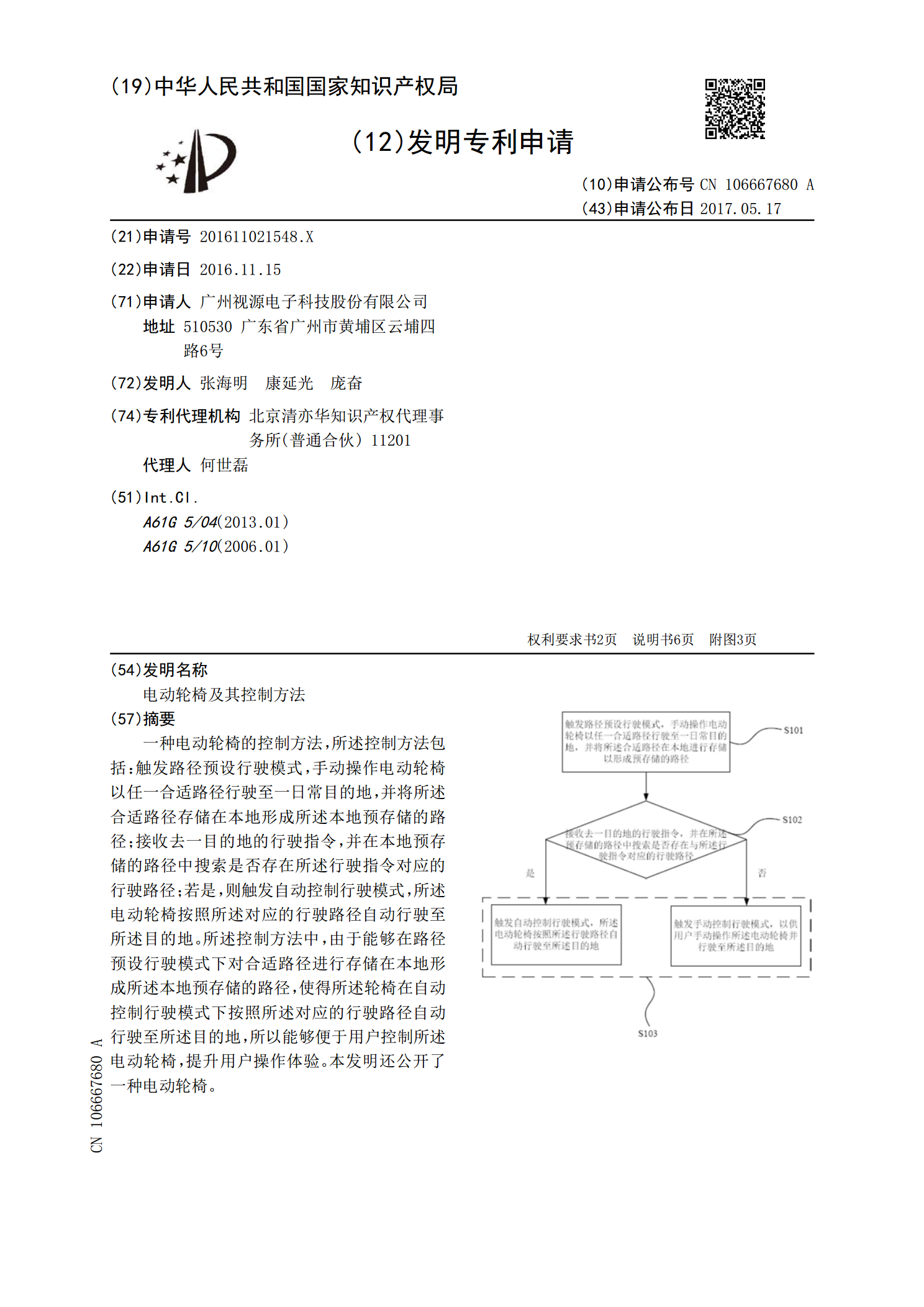
一种电动轮椅的控制方法,所述控制方法包括:触发路径预设行驶模式,手动操作电动轮椅以任一合适路径行驶至一日常目的地,并将所述合适路径存储在本地形成所述本地预存储的路径;接收去一目的地的行驶指令,并在本地预存储的路径中搜索是否存在所述行驶指令对应的行驶路径;若是,则触发自动控制行驶模式,所述电动轮椅按照所述对应的行驶路径自动行驶至所述目的地。所述控制方法中,由于能够在路径预设行驶模式下对合适路径进行存储在本地形成所述本地预存储的路径,使得所述轮椅在自动控制行驶模式下按照所述对应的行驶路径自动行驶至所述目的地,

电动轮椅控制装置及其控制方法.pdf
本发明为电动轮椅控制装置及其控制方法,本控制装置顶端为手柄的手柄轴左右为安装于基座导架的左右上导轴和左右下导轴。左右下导轴分别穿过左右差动滑块和复位弹簧。基座的2导轨嵌于差动滑块底面导槽内。差动滑块底面嵌有2感应体,基座嵌有与控制机构相接的传感器,二差动滑块内侧的差动齿条与手柄轴上的差动齿轮啮合。装于手柄轴的手柄滑架分别铰接二上导轴的滑套。固定于基座下导架的底导轴穿过手柄轴底部的制动滑架和制动压簧,二者之间的制动传感器接控制机构。控制方法为:手柄前移或转动,二差动滑块移动,传感器信号给控制机构、调节二轮转
新型电动护理轮椅及其控制方法.pdf
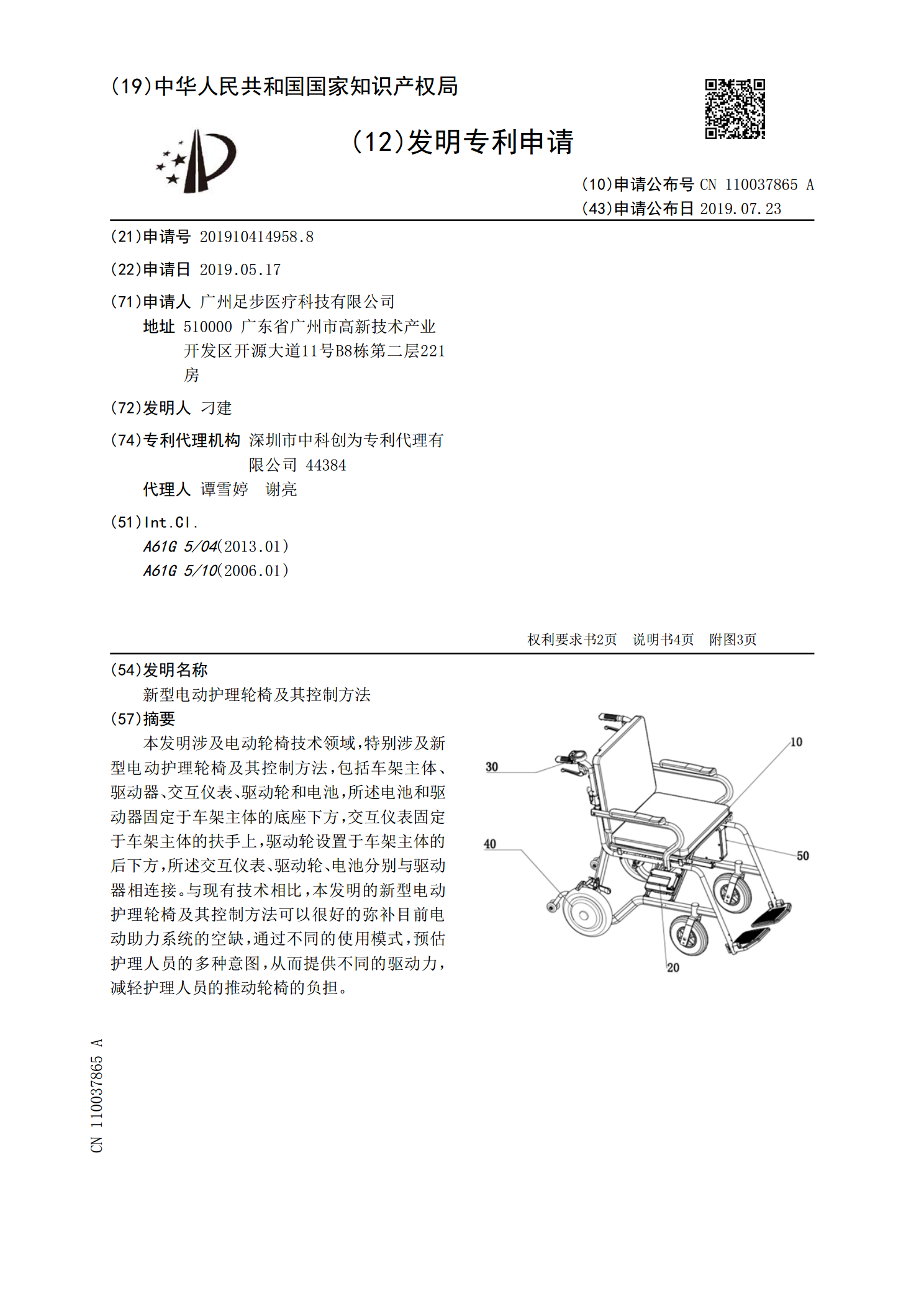
本发明涉及电动轮椅技术领域,特别涉及新型电动护理轮椅及其控制方法,包括车架主体、驱动器、交互仪表、驱动轮和电池,所述电池和驱动器固定于车架主体的底座下方,交互仪表固定于车架主体的扶手上,驱动轮设置于车架主体的后下方,所述交互仪表、驱动轮、电池分别与驱动器相连接。与现有技术相比,本发明的新型电动护理轮椅及其控制方法可以很好的弥补目前电动助力系统的空缺,通过不同的使用模式,预估护理人员的多种意图,从而提供不同的驱动力,减轻护理人员的推动轮椅的负担。
可如厕电动轮椅及其控制方法.pdf
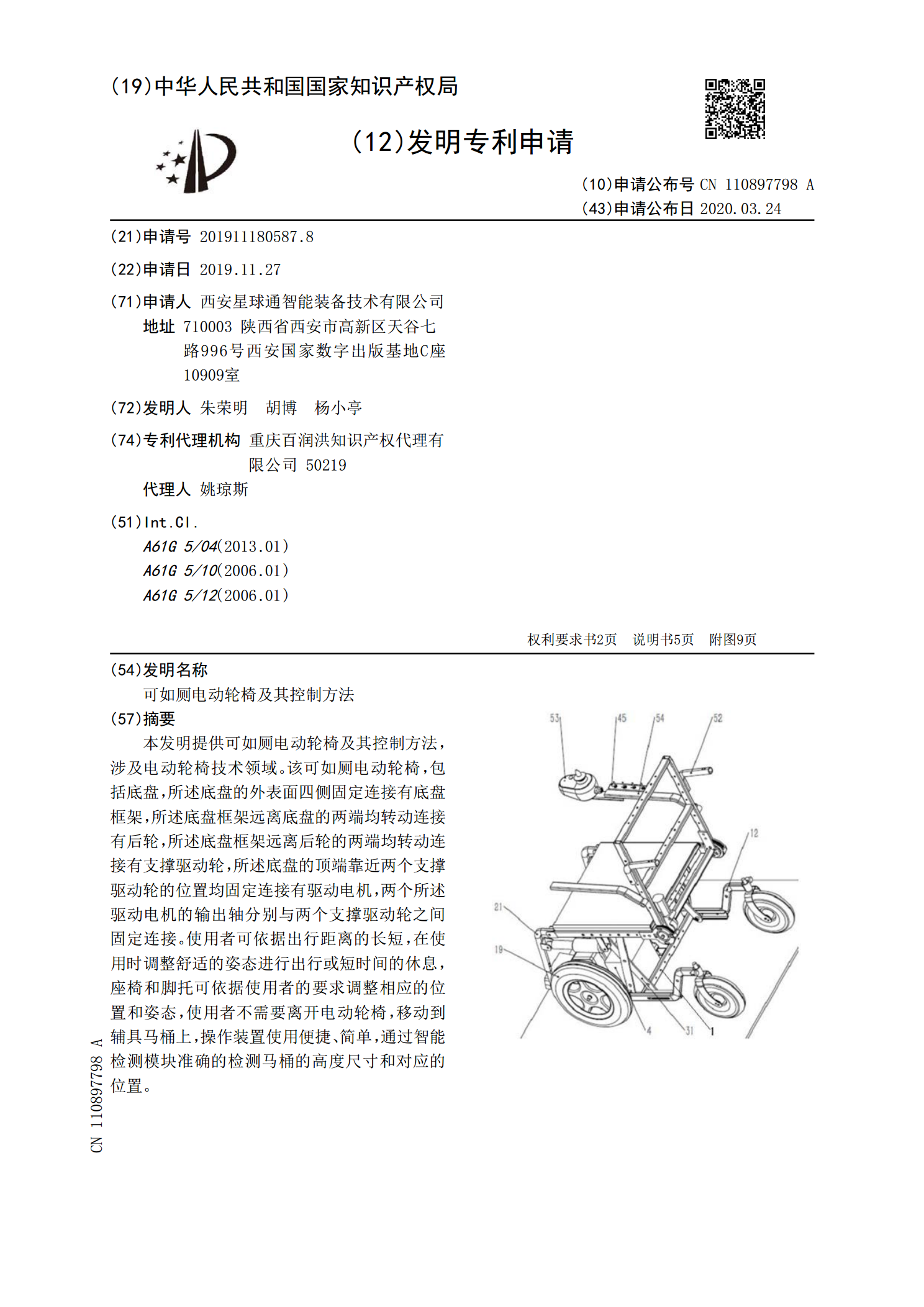
本发明提供可如厕电动轮椅及其控制方法,涉及电动轮椅技术领域。该可如厕电动轮椅,包括底盘,所述底盘的外表面四侧固定连接有底盘框架,所述底盘框架远离底盘的两端均转动连接有后轮,所述底盘框架远离后轮的两端均转动连接有支撑驱动轮,所述底盘的顶端靠近两个支撑驱动轮的位置均固定连接有驱动电机,两个所述驱动电机的输出轴分别与两个支撑驱动轮之间固定连接。使用者可依据出行距离的长短,在使用时调整舒适的姿态进行出行或短时间的休息,座椅和脚托可依据使用者的要求调整相应的位置和姿态,使用者不需要离开电动轮椅,移动到辅具马桶上,操
一种电动轮椅及其控制方法.pdf
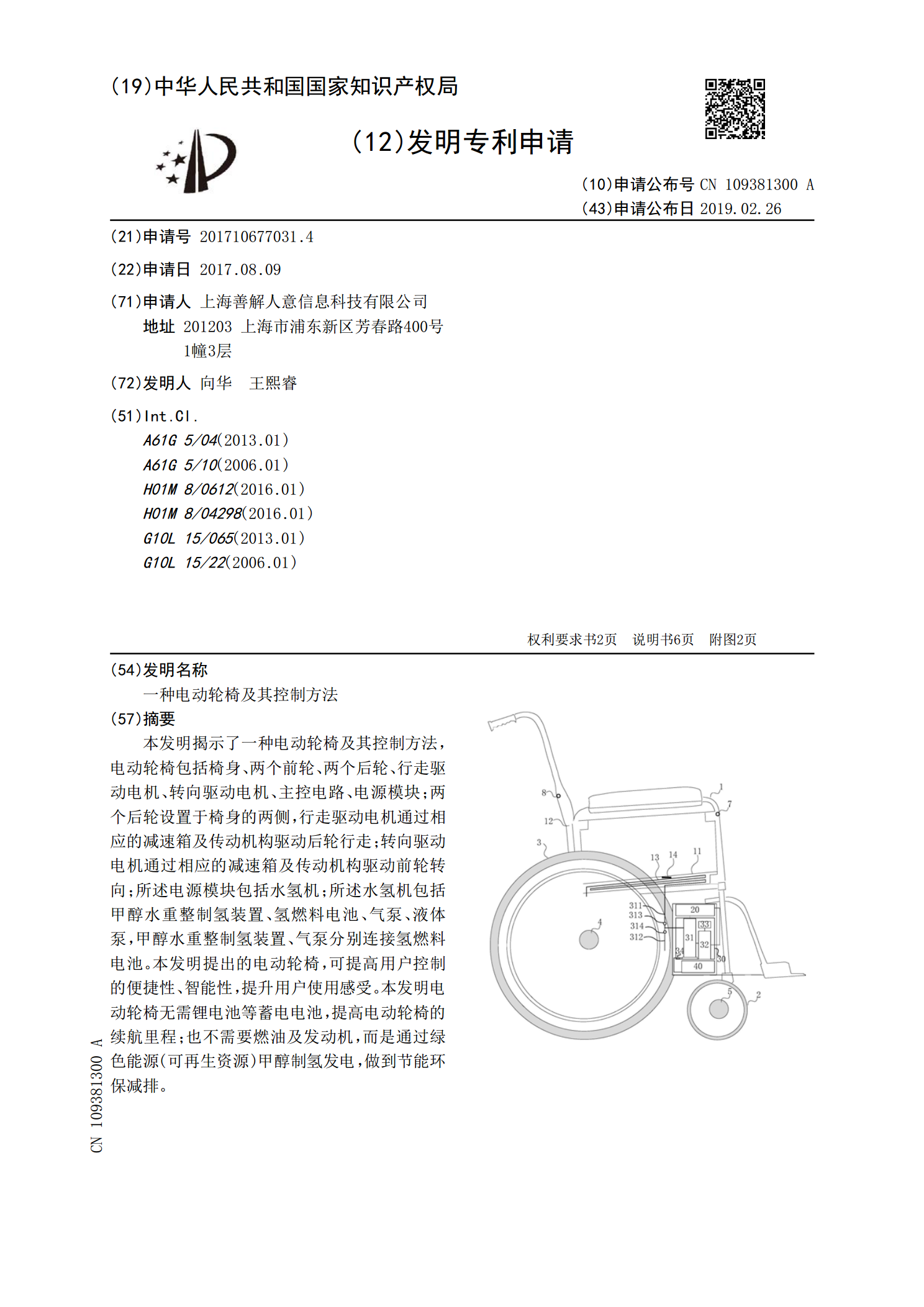
本发明揭示了一种电动轮椅及其控制方法,电动轮椅包括椅身、两个前轮、两个后轮、行走驱动电机、转向驱动电机、主控电路、电源模块;两个后轮设置于椅身的两侧,行走驱动电机通过相应的减速箱及传动机构驱动后轮行走;转向驱动电机通过相应的减速箱及传动机构驱动前轮转向;所述电源模块包括水氢机;所述水氢机包括甲醇水重整制氢装置、氢燃料电池、气泵、液体泵,甲醇水重整制氢装置、气泵分别连接氢燃料电池。本发明提出的电动轮椅,可提高用户控制的便捷性、智能性,提升用户使用感受。本发明电动轮椅无需锂电池等蓄电电池,提高电动轮椅的续航里