
一种大棚蔬菜收割机器人.pdf

猫巷****熙柔

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种大棚蔬菜收割机器人.pdf
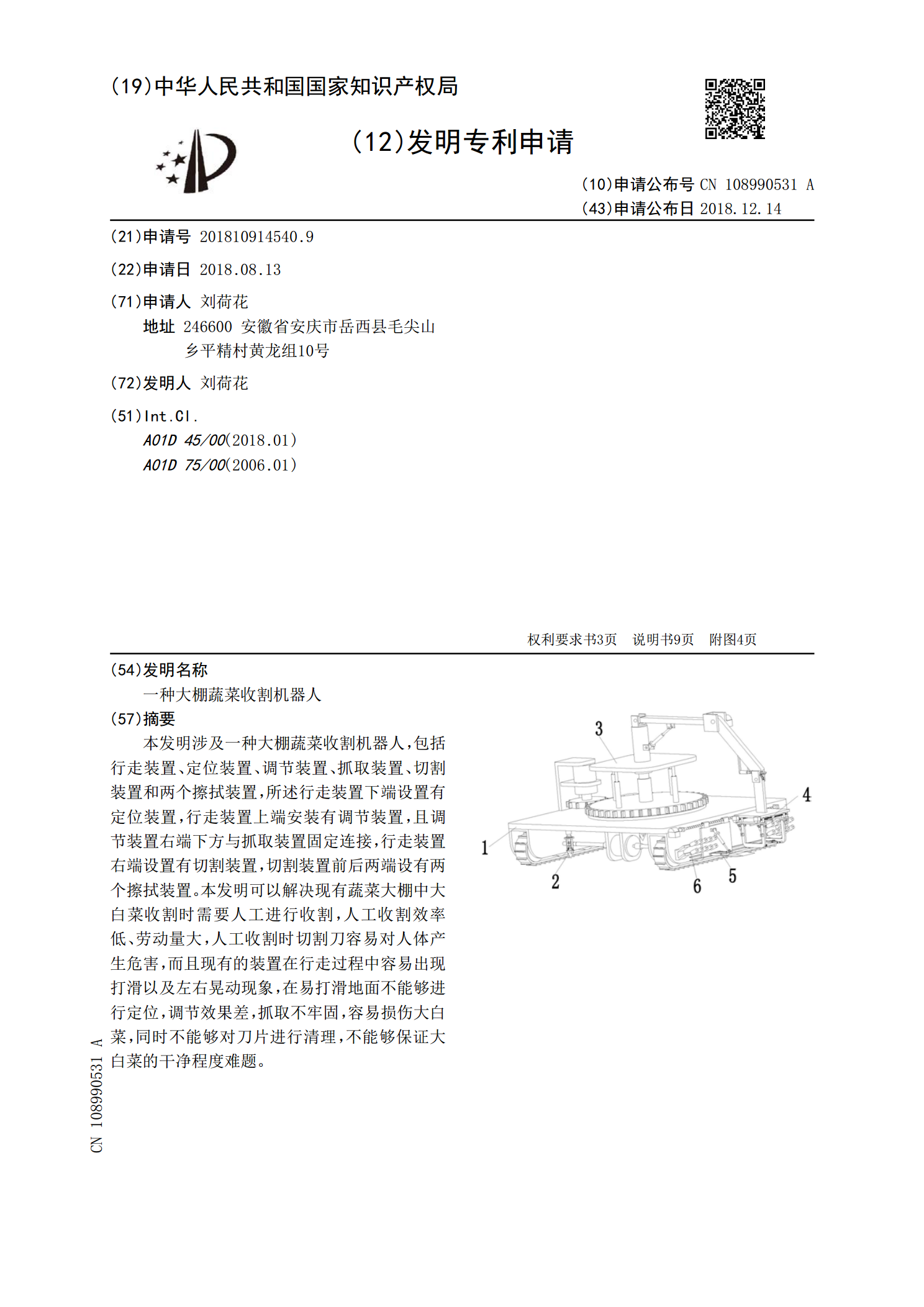
本发明涉及一种大棚蔬菜收割机器人,包括行走装置、定位装置、调节装置、抓取装置、切割装置和两个擦拭装置,所述行走装置下端设置有定位装置,行走装置上端安装有调节装置,且调节装置右端下方与抓取装置固定连接,行走装置右端设置有切割装置,切割装置前后两端设有两个擦拭装置。本发明可以解决现有蔬菜大棚中大白菜收割时需要人工进行收割,人工收割效率低、劳动量大,人工收割时切割刀容易对人体产生危害,而且现有的装置在行走过程中容易出现打滑以及左右晃动现象,在易打滑地面不能够进行定位,调节效果差,抓取不牢固,容易损伤大白菜,同时

一种大棚蔬菜种植用收割装置.pdf
本发明公开了一种大棚蔬菜种植用收割装置,涉及蔬菜收割技术领域,具体一种大棚蔬菜种植用收割装置,包括收割装置本体,所述收割装置本体的左侧固定安装有铲板,所述铲板的正面和背面均连接有支架。该大棚蔬菜种植用收割装置,通过收割装置本体、收割刀具、安装横梁和连接装置之间的配合,利用连接装置中弹簧的压缩,实现了连接杆与调节孔的分离作用,达到了收割刀具的拆卸效果,同时利用弹簧的回弹,达到了收割刀具的安装效果,有效的解决了收割刀具的更换的问题,采用连接装置的连接方式,简化了收割刀具的拆装步骤,减轻了工作人员对收割刀具的拆
一种大棚蔬菜种植自动化收割装置.pdf
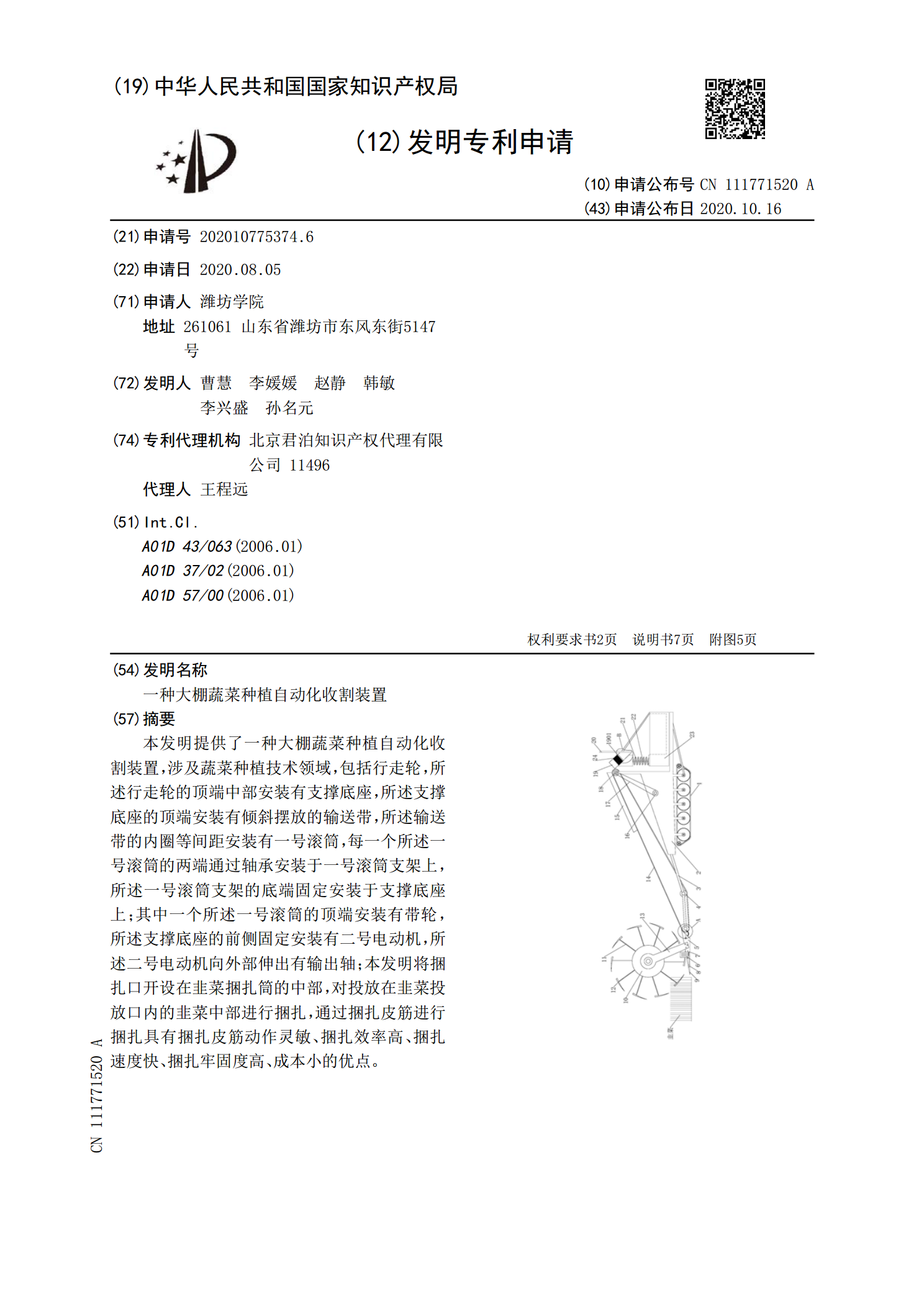
本发明提供了一种大棚蔬菜种植自动化收割装置,涉及蔬菜种植技术领域,包括行走轮,所述行走轮的顶端中部安装有支撑底座,所述支撑底座的顶端安装有倾斜摆放的输送带,所述输送带的内圈等间距安装有一号滚筒,每一个所述一号滚筒的两端通过轴承安装于一号滚筒支架上,所述一号滚筒支架的底端固定安装于支撑底座上;其中一个所述一号滚筒的顶端安装有带轮,所述支撑底座的前侧固定安装有二号电动机,所述二号电动机向外部伸出有输出轴;本发明将捆扎口开设在韭菜捆扎筒的中部,对投放在韭菜投放口内的韭菜中部进行捆扎,通过捆扎皮筋进行捆扎具有捆扎
一种农业大棚蔬菜搬运机器人.pdf
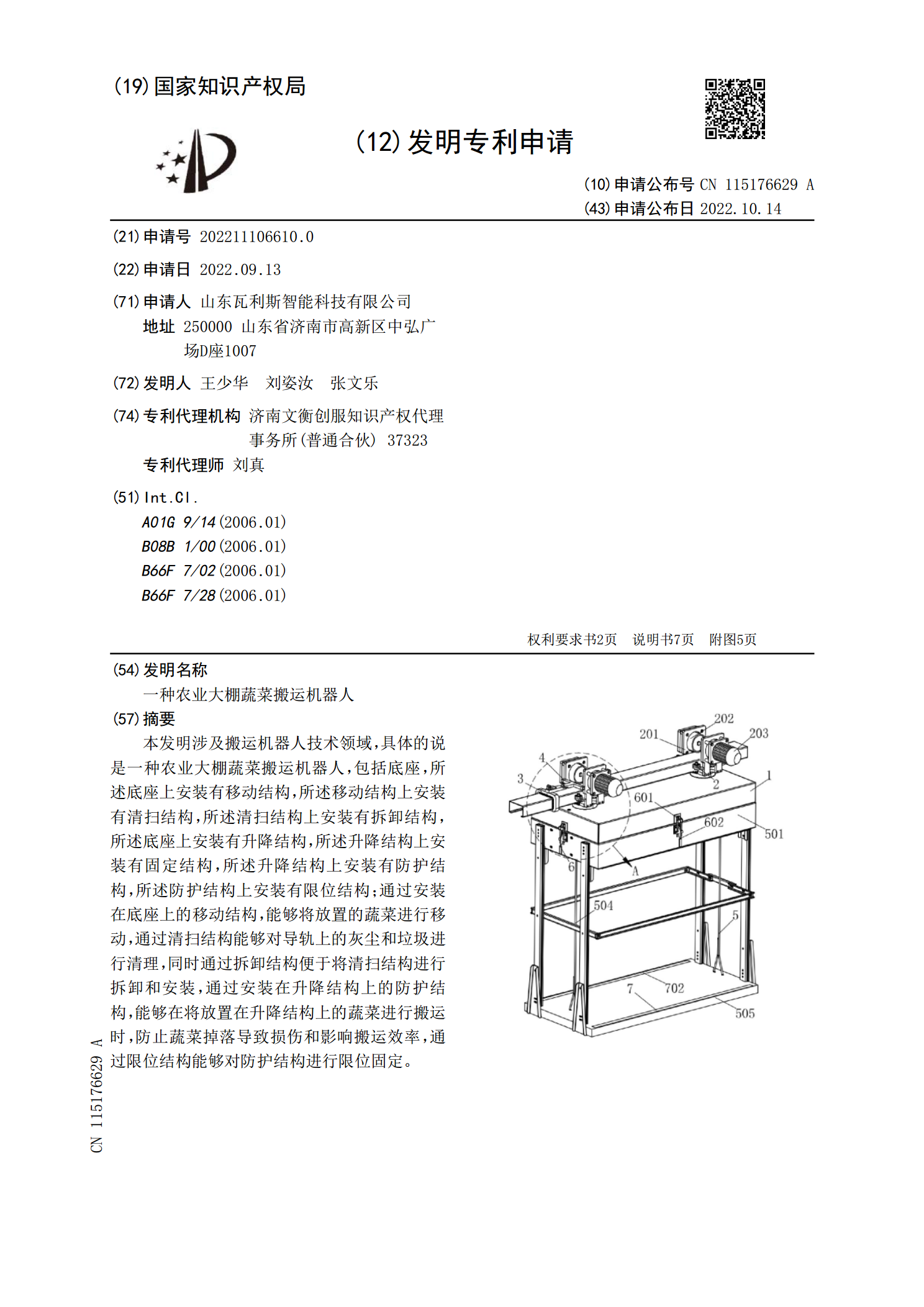
本发明涉及搬运机器人技术领域,具体的说是一种农业大棚蔬菜搬运机器人,包括底座,所述底座上安装有移动结构,所述移动结构上安装有清扫结构,所述清扫结构上安装有拆卸结构,所述底座上安装有升降结构,所述升降结构上安装有固定结构,所述升降结构上安装有防护结构,所述防护结构上安装有限位结构;通过安装在底座上的移动结构,能够将放置的蔬菜进行移动,通过清扫结构能够对导轨上的灰尘和垃圾进行清理,同时通过拆卸结构便于将清扫结构进行拆卸和安装,通过安装在升降结构上的防护结构,能够在将放置在升降结构上的蔬菜进行搬运时,防止蔬菜掉
一种蔬菜大棚骨架智能安装机器人.pdf
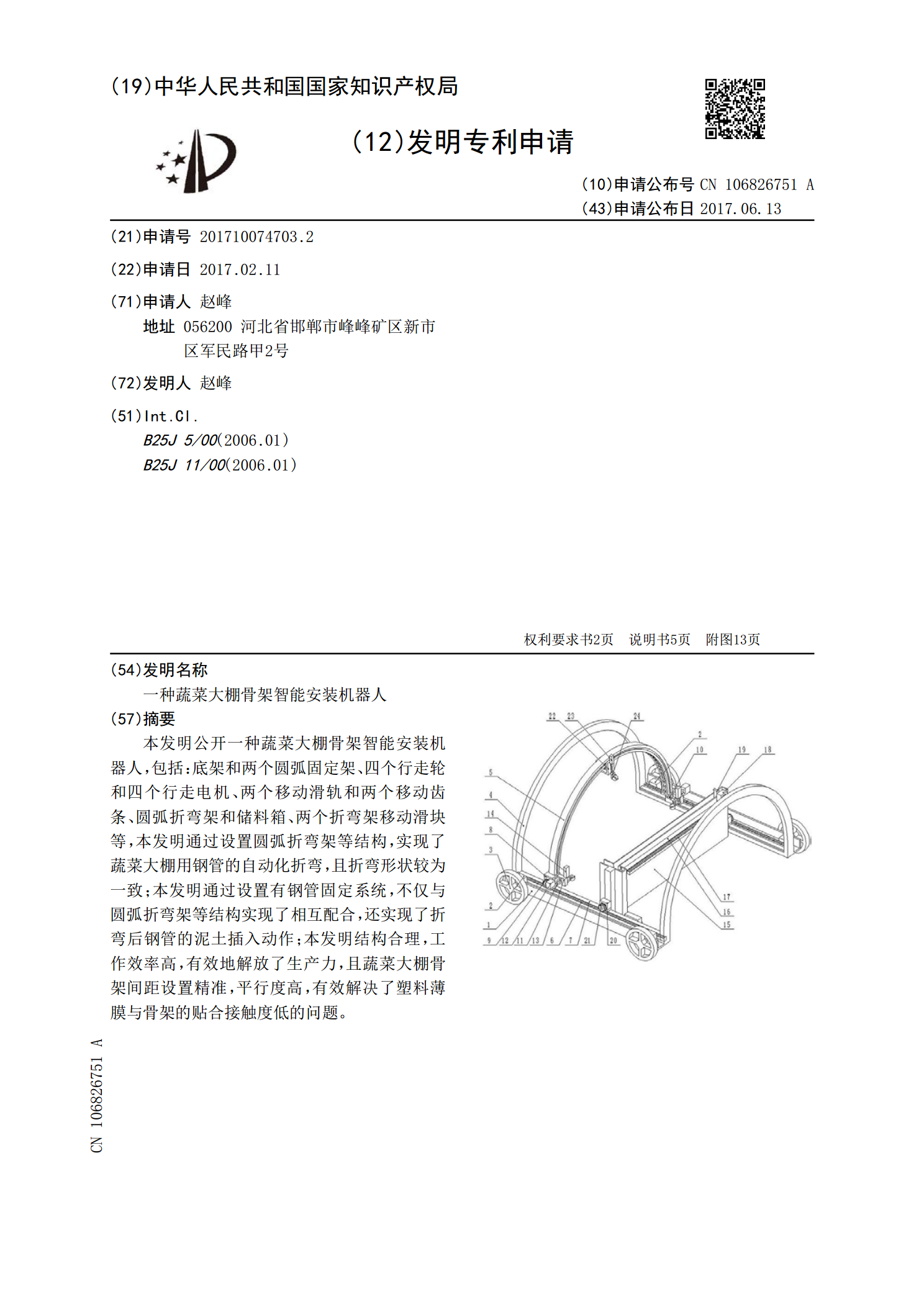
本发明公开一种蔬菜大棚骨架智能安装机器人,包括:底架和两个圆弧固定架、四个行走轮和四个行走电机、两个移动滑轨和两个移动齿条、圆弧折弯架和储料箱、两个折弯架移动滑块等,本发明通过设置圆弧折弯架等结构,实现了蔬菜大棚用钢管的自动化折弯,且折弯形状较为一致;本发明通过设置有钢管固定系统,不仅与圆弧折弯架等结构实现了相互配合,还实现了折弯后钢管的泥土插入动作;本发明结构合理,工作效率高,有效地解放了生产力,且蔬菜大棚骨架间距设置精准,平行度高,有效解决了塑料薄膜与骨架的贴合接触度低的问题。