
一种联合收获机拨禾轮自适应调节系统及联合收割机.pdf

慧娇****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种联合收获机拨禾轮自适应调节系统及联合收割机.pdf
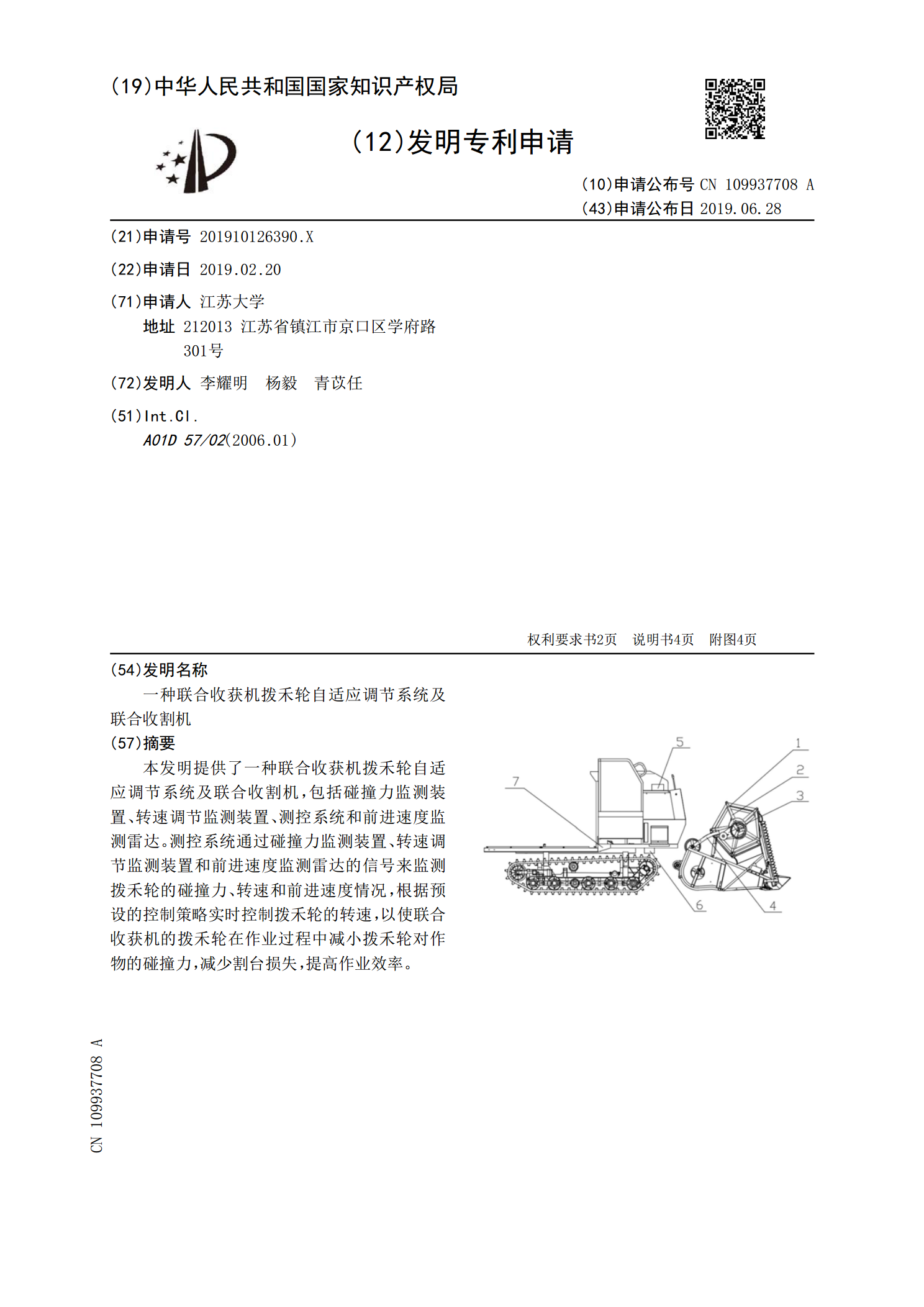
本发明提供了一种联合收获机拨禾轮自适应调节系统及联合收割机,包括碰撞力监测装置、转速调节监测装置、测控系统和前进速度监测雷达。测控系统通过碰撞力监测装置、转速调节监测装置和前进速度监测雷达的信号来监测拨禾轮的碰撞力、转速和前进速度情况,根据预设的控制策略实时控制拨禾轮的转速,以使联合收获机的拨禾轮在作业过程中减小拨禾轮对作物的碰撞力,减少割台损失,提高作业效率。

联合收割机拨禾轮的自动调节系统、方法和联合收割机.pdf
本发明涉及联合收割机技术领域,尤其涉及一种联合收割机拨禾轮的自动调节系统、方法和联合收割机,系统包括包括车载控制单元;车载控制单元用于:获取拨禾轮的目标转速;车载控制单元还用于:根据待收割作物的实际高度计算拨禾轮的目标高度和目标前后位置,或者,获取用户设置的目标高度和目标前后位置;车载控制单元还用于:控制联合收割机的拨禾轮的高度至目标高度,以及控制拨禾轮的前后位置至目标前后位置,以及控制拨禾轮的转速至目标转速。能够实现拨禾轮的高度、前后位置和转速的自动调节,极大地降低联合收割机作业难度,提高作业效率。
一种谷物收获机拨禾轮.pdf
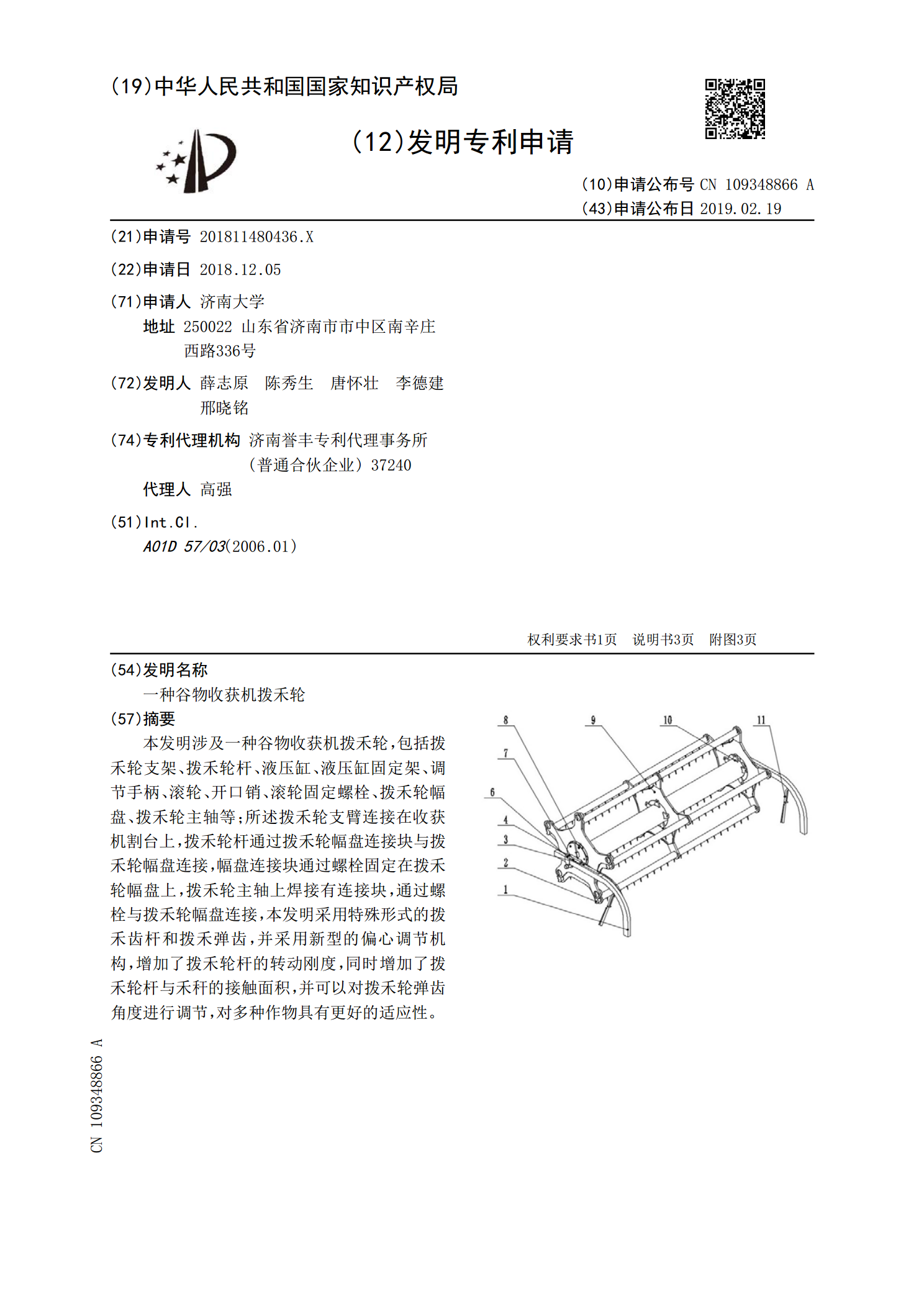
本发明涉及一种谷物收获机拨禾轮,包括拨禾轮支架、拨禾轮杆、液压缸、液压缸固定架、调节手柄、滚轮、开口销、滚轮固定螺栓、拨禾轮幅盘、拨禾轮主轴等;所述拨禾轮支臂连接在收获机割台上,拨禾轮杆通过拨禾轮幅盘连接块与拨禾轮幅盘连接,幅盘连接块通过螺栓固定在拨禾轮幅盘上,拨禾轮主轴上焊接有连接块,通过螺栓与拨禾轮幅盘连接,本发明采用特殊形式的拨禾齿杆和拨禾弹齿,并采用新型的偏心调节机构,增加了拨禾轮杆的转动刚度,同时增加了拨禾轮杆与禾秆的接触面积,并可以对拨禾轮弹齿角度进行调节,对多种作物具有更好的适应性。
一种玉米联合收获机拨禾装置.pdf
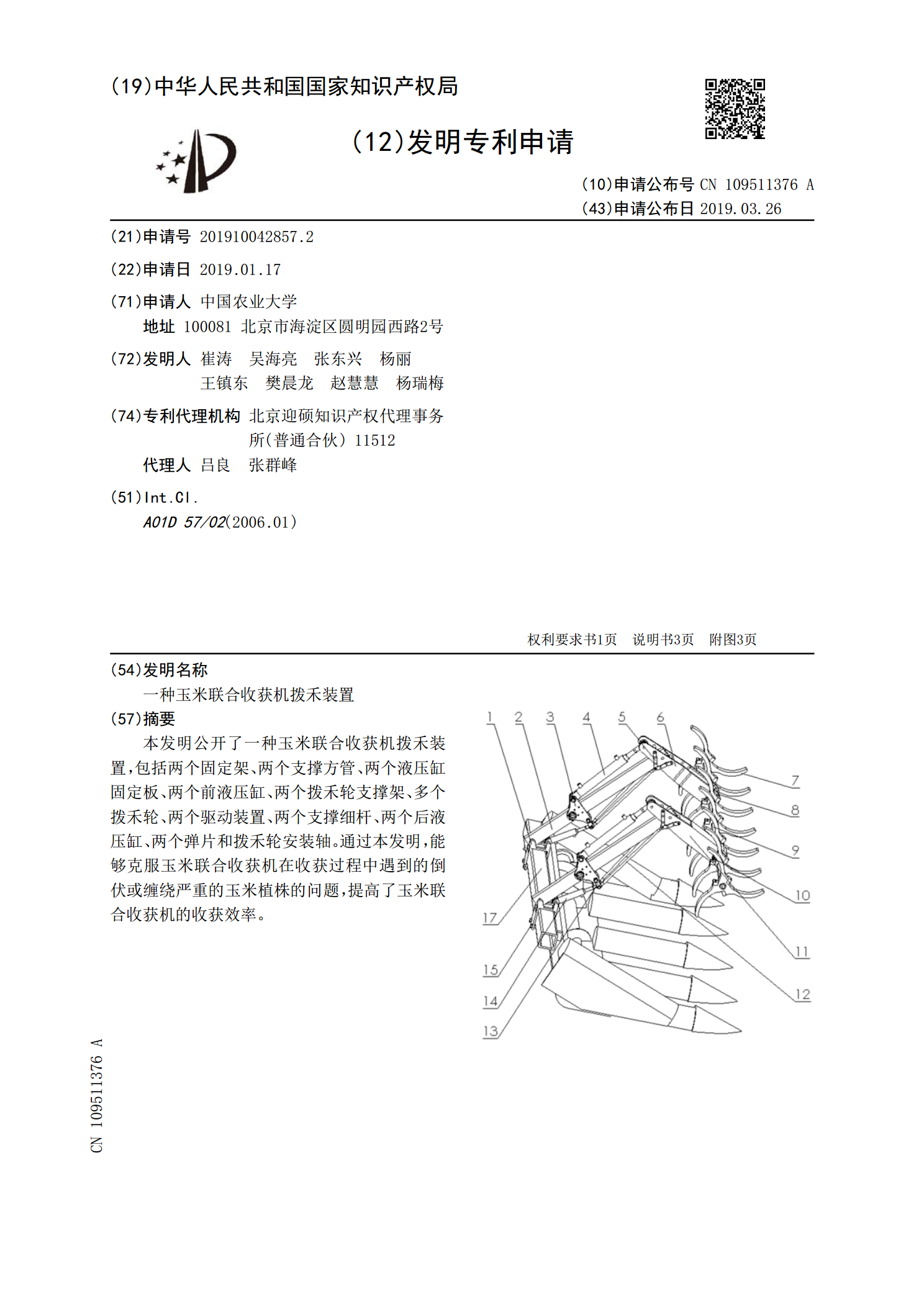
本发明公开了一种玉米联合收获机拨禾装置,包括两个固定架、两个支撑方管、两个液压缸固定板、两个前液压缸、两个拨禾轮支撑架、多个拨禾轮、两个驱动装置、两个支撑细杆、两个后液压缸、两个弹片和拨禾轮安装轴。通过本发明,能够克服玉米联合收获机在收获过程中遇到的倒伏或缠绕严重的玉米植株的问题,提高了玉米联合收获机的收获效率。
一种联合收获机及其基于带传动的偏心式拨禾轮.pdf
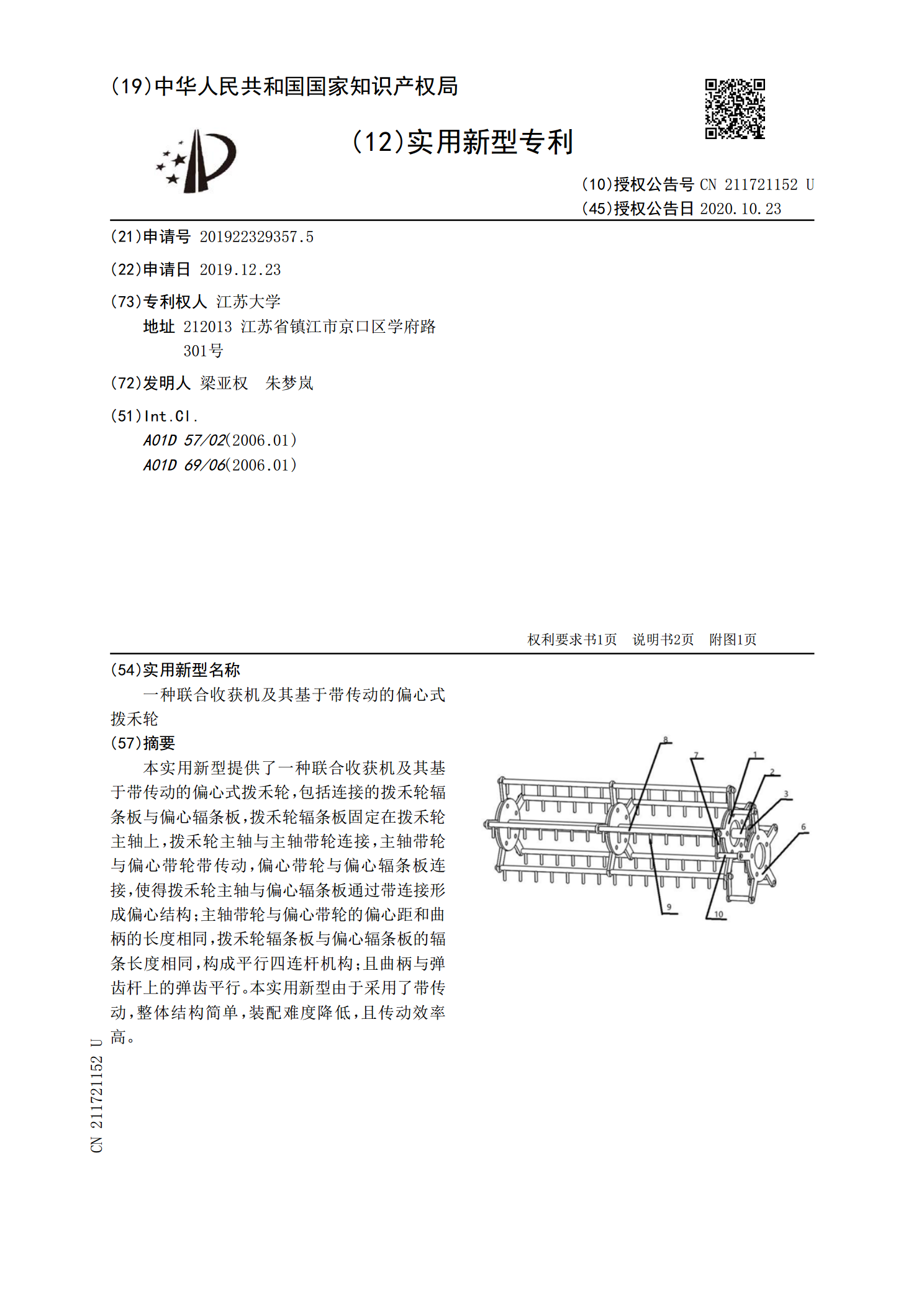
本实用新型提供了一种联合收获机及其基于带传动的偏心式拨禾轮,包括连接的拨禾轮辐条板与偏心辐条板,拨禾轮辐条板固定在拨禾轮主轴上,拨禾轮主轴与主轴带轮连接,主轴带轮与偏心带轮带传动,偏心带轮与偏心辐条板连接,使得拨禾轮主轴与偏心辐条板通过带连接形成偏心结构;主轴带轮与偏心带轮的偏心距和曲柄的长度相同,拨禾轮辐条板与偏心辐条板的辐条长度相同,构成平行四连杆机构;且曲柄与弹齿杆上的弹齿平行。本实用新型由于采用了带传动,整体结构简单,装配难度降低,且传动效率高。