
联合收割机拨禾轮的自动调节系统、方法和联合收割机.pdf

书生****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

联合收割机拨禾轮的自动调节系统、方法和联合收割机.pdf
本发明涉及联合收割机技术领域,尤其涉及一种联合收割机拨禾轮的自动调节系统、方法和联合收割机,系统包括包括车载控制单元;车载控制单元用于:获取拨禾轮的目标转速;车载控制单元还用于:根据待收割作物的实际高度计算拨禾轮的目标高度和目标前后位置,或者,获取用户设置的目标高度和目标前后位置;车载控制单元还用于:控制联合收割机的拨禾轮的高度至目标高度,以及控制拨禾轮的前后位置至目标前后位置,以及控制拨禾轮的转速至目标转速。能够实现拨禾轮的高度、前后位置和转速的自动调节,极大地降低联合收割机作业难度,提高作业效率。
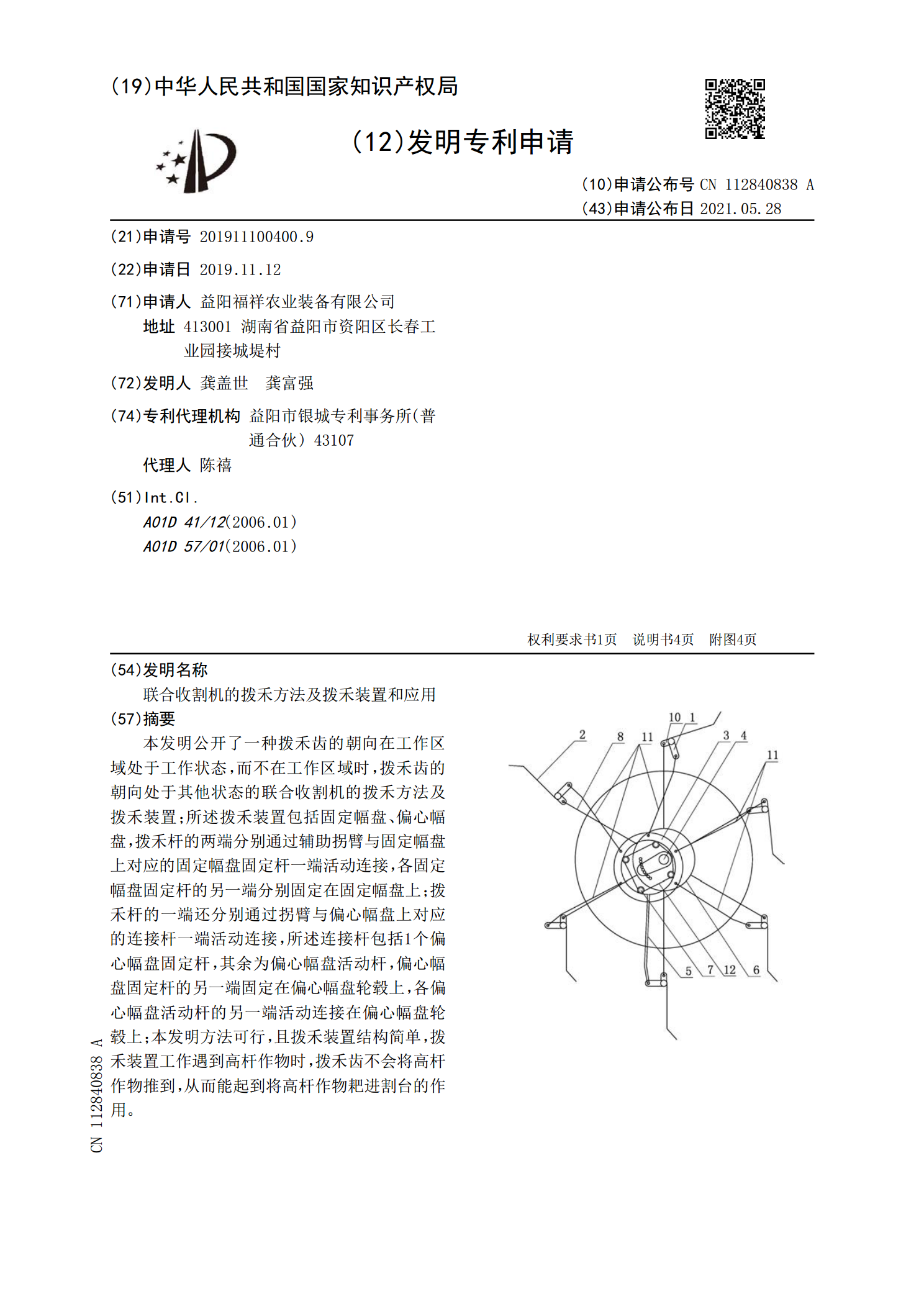
联合收割机的拨禾方法及拨禾装置和应用.pdf
本发明公开了一种拨禾齿的朝向在工作区域处于工作状态,而不在工作区域时,拨禾齿的朝向处于其他状态的联合收割机的拨禾方法及拨禾装置;所述拨禾装置包括固定幅盘、偏心幅盘,拨禾杆的两端分别通过辅助拐臂与固定幅盘上对应的固定幅盘固定杆一端活动连接,各固定幅盘固定杆的另一端分别固定在固定幅盘上;拨禾杆的一端还分别通过拐臂与偏心幅盘上对应的连接杆一端活动连接,所述连接杆包括1个偏心幅盘固定杆,其余为偏心幅盘活动杆,偏心幅盘固定杆的另一端固定在偏心幅盘轮毂上,各偏心幅盘活动杆的另一端活动连接在偏心幅盘轮毂上;本发明方法可
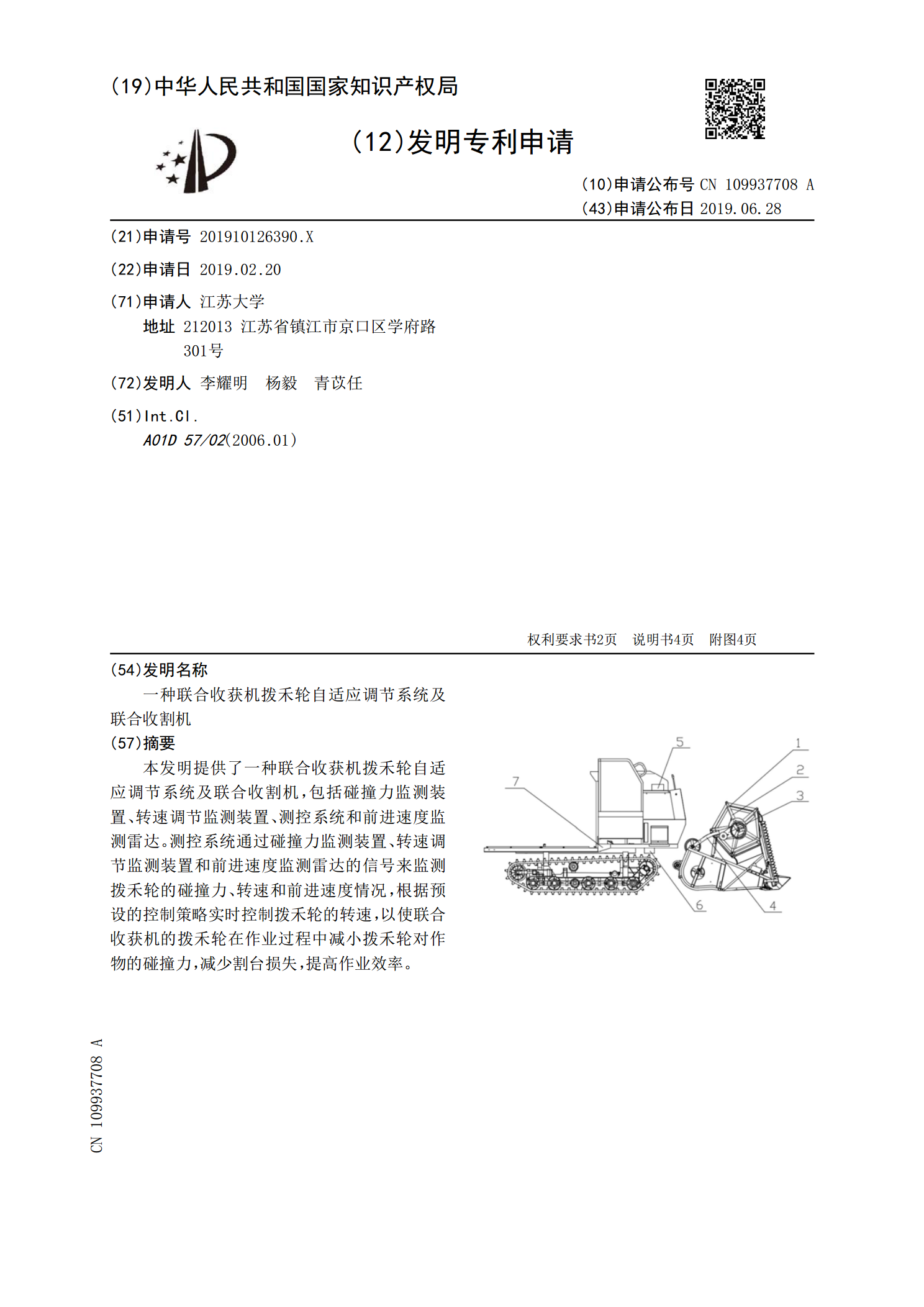
一种联合收获机拨禾轮自适应调节系统及联合收割机.pdf
本发明提供了一种联合收获机拨禾轮自适应调节系统及联合收割机,包括碰撞力监测装置、转速调节监测装置、测控系统和前进速度监测雷达。测控系统通过碰撞力监测装置、转速调节监测装置和前进速度监测雷达的信号来监测拨禾轮的碰撞力、转速和前进速度情况,根据预设的控制策略实时控制拨禾轮的转速,以使联合收获机的拨禾轮在作业过程中减小拨禾轮对作物的碰撞力,减少割台损失,提高作业效率。
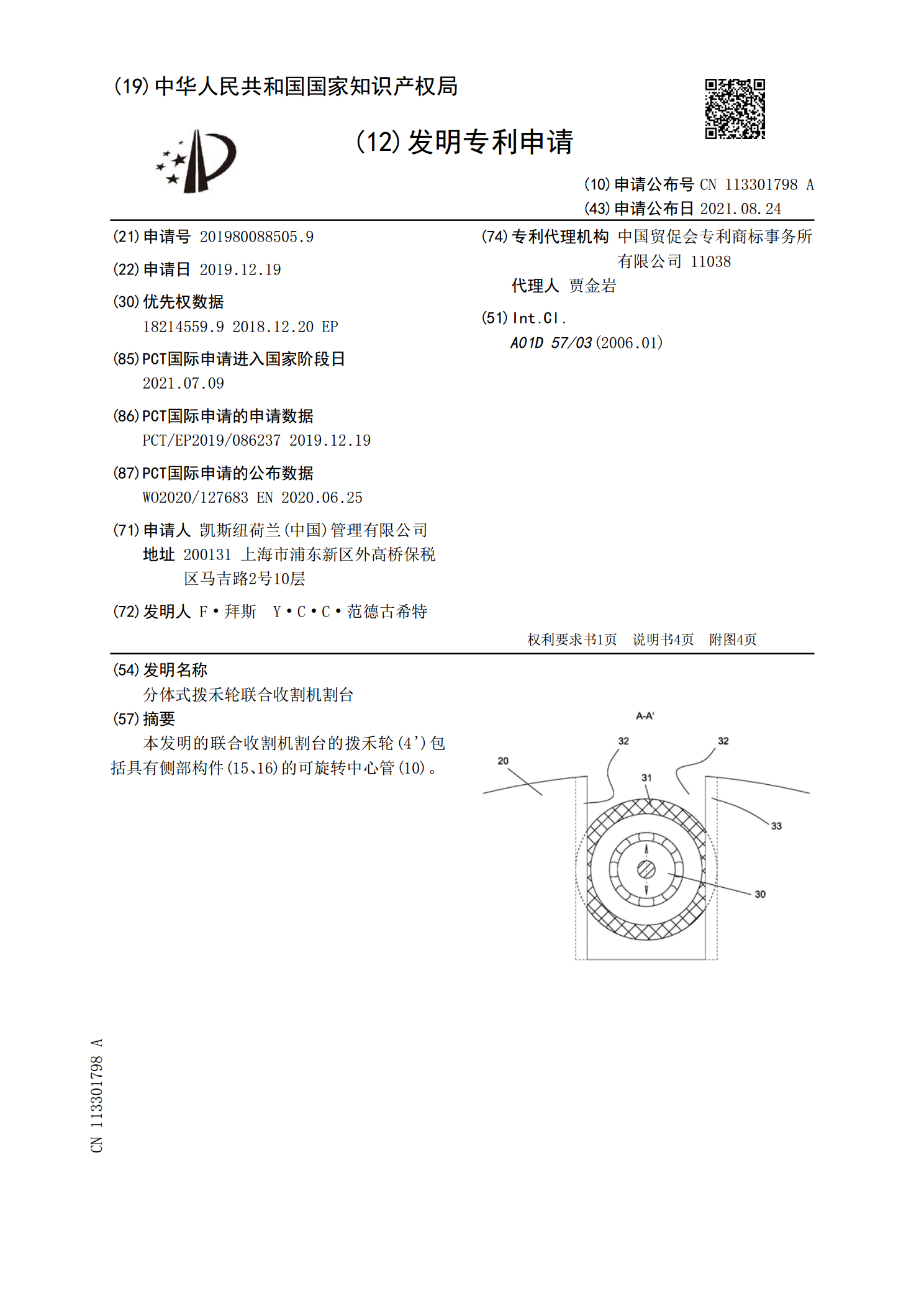
分体式拨禾轮联合收割机割台.pdf
本发明的联合收割机割台的拨禾轮(4')包括具有侧部构件(15、16)的可旋转中心管(10)。
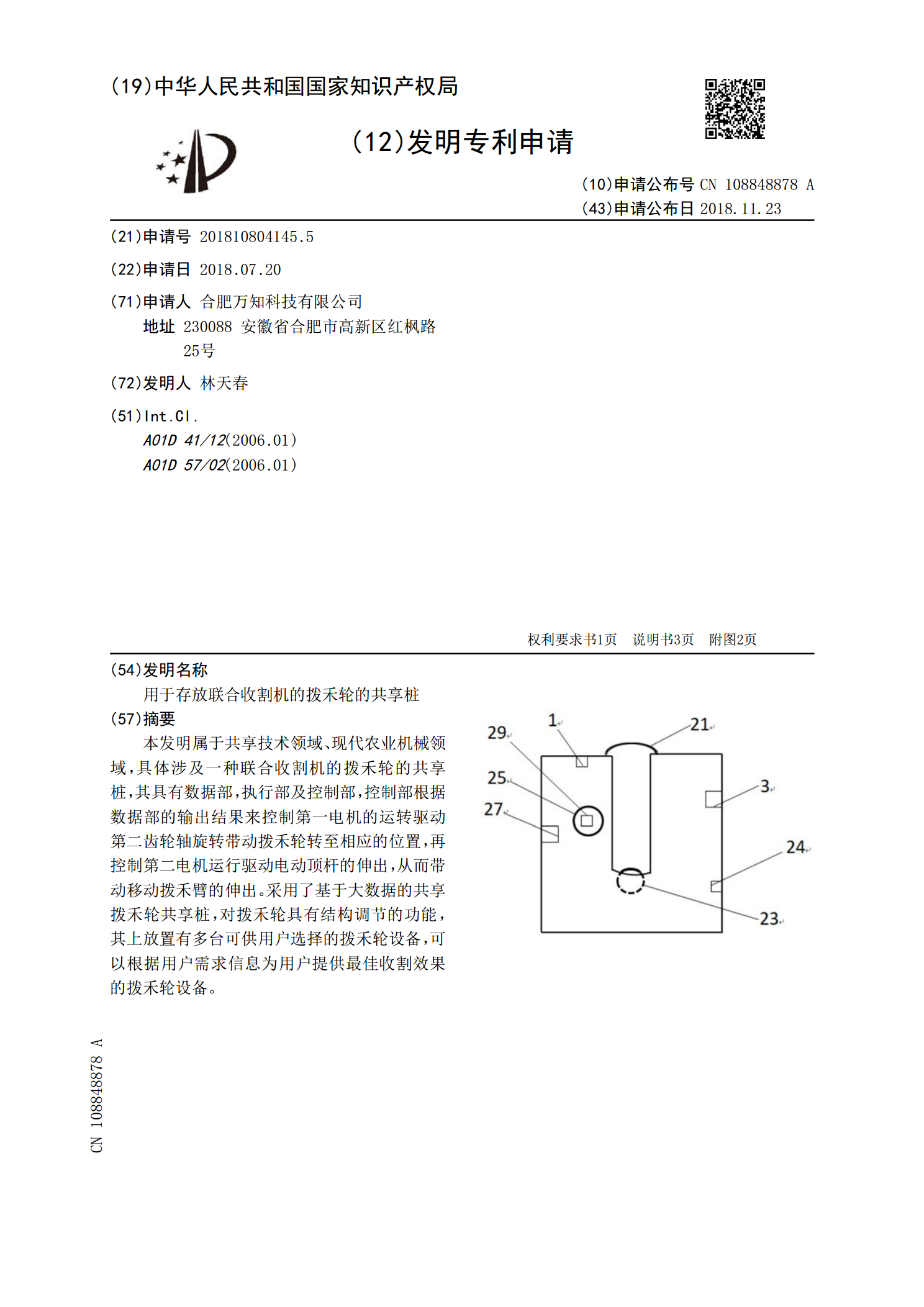
用于存放联合收割机的拨禾轮的共享桩.pdf
本发明属于共享技术领域、现代农业机械领域,具体涉及一种联合收割机的拨禾轮的共享桩,其具有数据部,执行部及控制部,控制部根据数据部的输出结果来控制第一电机的运转驱动第二齿轮轴旋转带动拨禾轮转至相应的位置,再控制第二电机运行驱动电动顶杆的伸出,从而带动移动拨禾臂的伸出。采用了基于大数据的共享拨禾轮共享桩,对拨禾轮具有结构调节的功能,其上放置有多台可供用户选择的拨禾轮设备,可以根据用户需求信息为用户提供最佳收割效果的拨禾轮设备。