
一种图像边缘检测方法及系统.pdf

一只****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种图像边缘检测方法及系统.pdf
本发明公开了一种图像边缘检测方法及系统,涉及边缘检测技术领域,所述方法包括:获取原始图像;原始图像为无人机所处环境的图像;将原始图像输入至边缘检测模型中,得到原始图像的边缘图;边缘图用于无人机进行障碍物检测;边缘检测模型包括第一特征提取模块、第二特征提取模块、筛选模块和特征融合模块;第二特征提取模块由深度可分离卷积网络构建得到;筛选模块由基于自适应阈值法的八向差分算子构建得到。本发明引入深度可分离卷积网络,提高了边缘检测的效率;基于利用自适应阈值法对八向差分算子改进,且引入多尺度特征融合网络,提高了边缘检
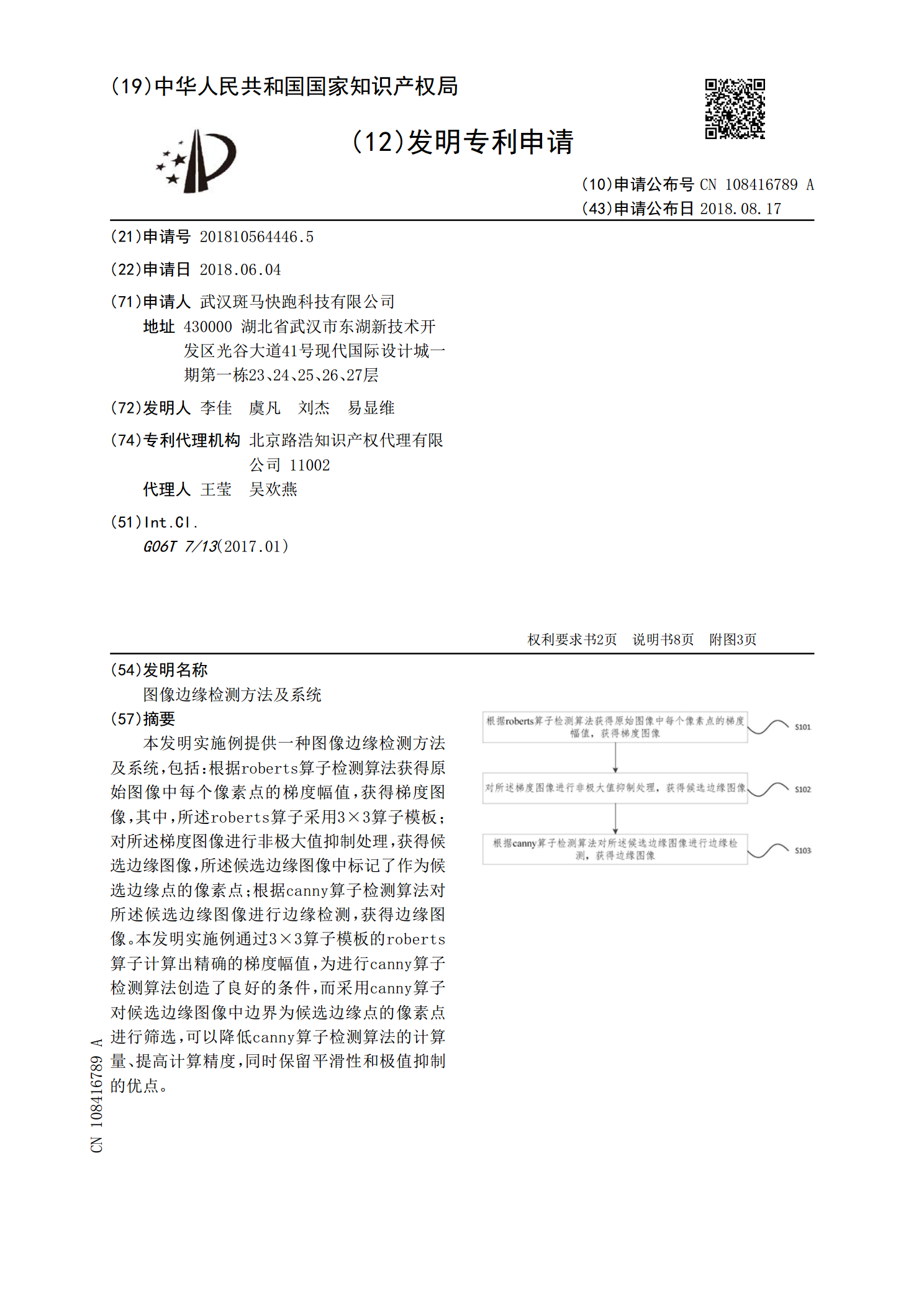
图像边缘检测方法及系统.pdf
本发明实施例提供一种图像边缘检测方法及系统,包括:根据roberts算子检测算法获得原始图像中每个像素点的梯度幅值,获得梯度图像,其中,所述roberts算子采用3×3算子模板;对所述梯度图像进行非极大值抑制处理,获得候选边缘图像,所述候选边缘图像中标记了作为候选边缘点的像素点;根据canny算子检测算法对所述候选边缘图像进行边缘检测,获得边缘图像。本发明实施例通过3×3算子模板的roberts算子计算出精确的梯度幅值,为进行canny算子检测算法创造了良好的条件,而采用canny算子对候选边缘图像中边界

一种基于边缘线融合的阶跃型图像边缘检测方法及系统.pdf
本发明提供了一种基于边缘线融合的阶跃型图像边缘检测方法及系统,涉及图像边缘检测技术领域,用以解决模极大值方法无法区分阶跃型边缘和屋脊型边缘、尺度独立算法得到的图像边缘不连续且边缘响应次数不唯一的问题。本发明的技术要点包括:利用小波变换的模极大值算法对灰度图像进行边缘检测,获得第一边缘图像;利用尺度独立算法对灰度图像进行边缘检测,获得第二边缘图像;对于第一边缘图像中的任意一条边缘线,在第二边缘图像中寻找高度重叠的边缘线并保留,保留的像素点即为检测到的边缘点。本发明能够尽量避免噪声和细线条的干扰,同时在边缘图

一种图像边缘的检测方法.pdf
本发明公开了一种图像边缘的检测方法。该方法包括:滤除空间目标图像中的噪声;计算单一尺度下图像的形态学梯度;根据所述单一尺度下图像的形态学梯度,计算得到多尺度形态学梯度图像;确定多尺度形态学梯度图像中的极大值点的位置;使用过零点位置模板选取对应的形态学梯度边缘,并根据预设阈值去除伪边缘;保留目标边缘的主干并去除边缘中的碎片,得到所述空间目标图像的边缘。通过使用本发明所提供的图像边缘的检测方法,可以有效地提取空间目标图像的边缘信息。
一种图像边缘检测方法.pdf
一种图像边缘检测方法属于图像提取方法技术领域,尤其涉及一种图像边缘检测方法。本发明提供一种定位精度高的图像边缘检测方法。本发明包括以下步骤:1)选取一个初始阈值的估计值;2)利用阈值将图像分为两组;3)计算两个区域灰度值;4)选取新的阈值;5)分割图像,变成二值图像,挖空同一区域内部像素点,留下图像的轮廓,检测图像边缘。