
一种无人谷物联合收割机协同导航作业路径规划系统与方法.pdf

灵慧****89

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人谷物联合收割机协同导航作业路径规划系统与方法.pdf
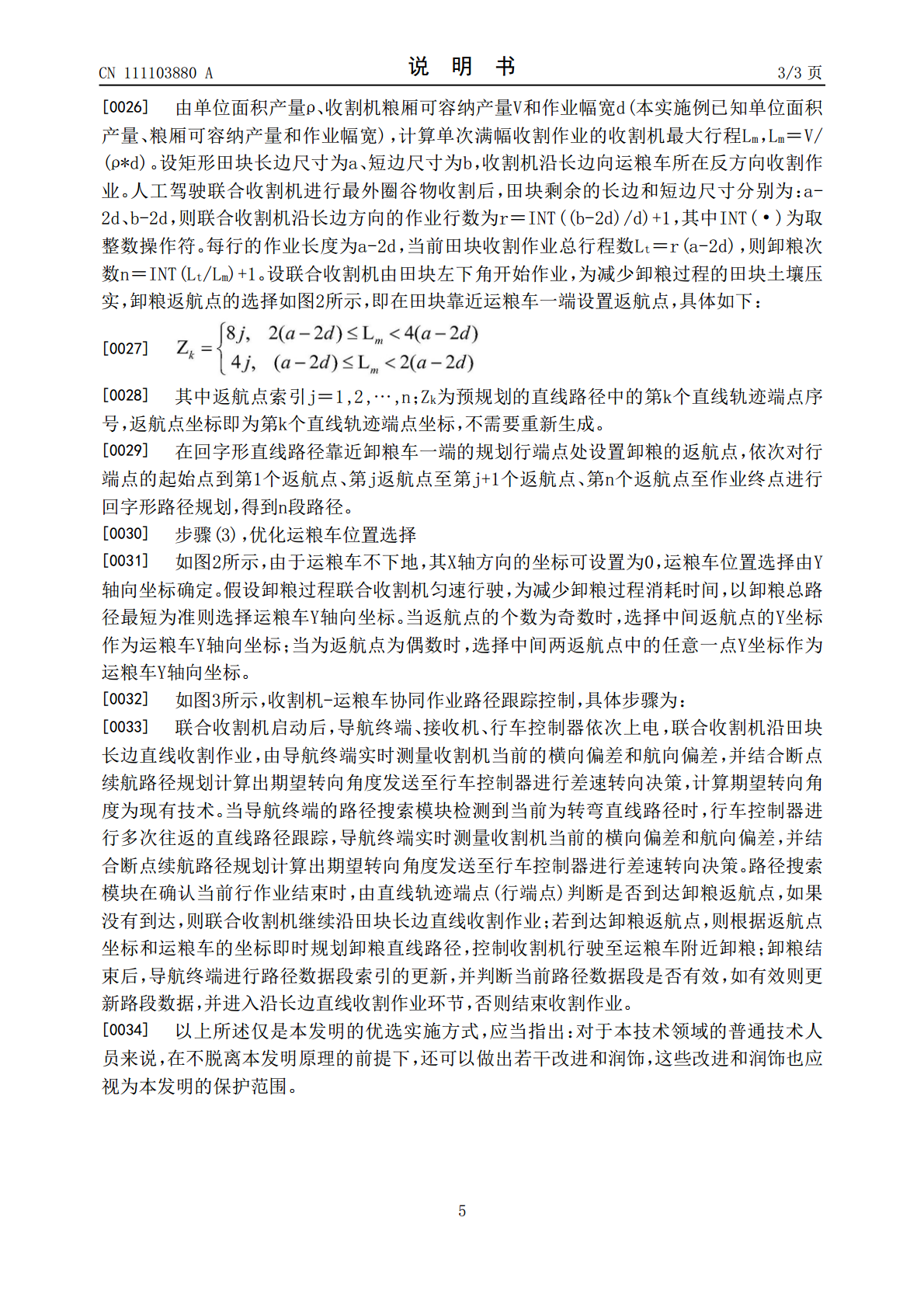
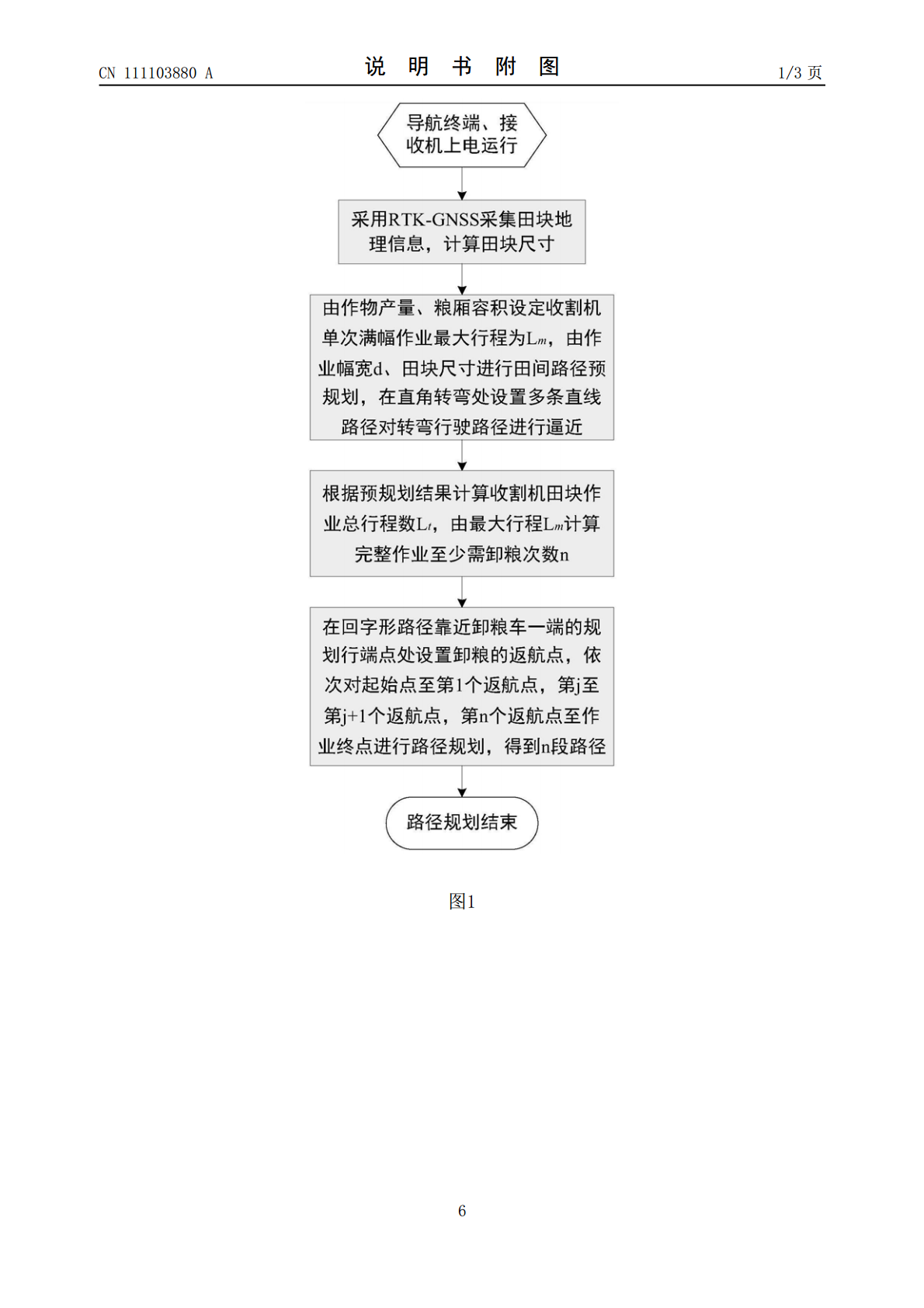
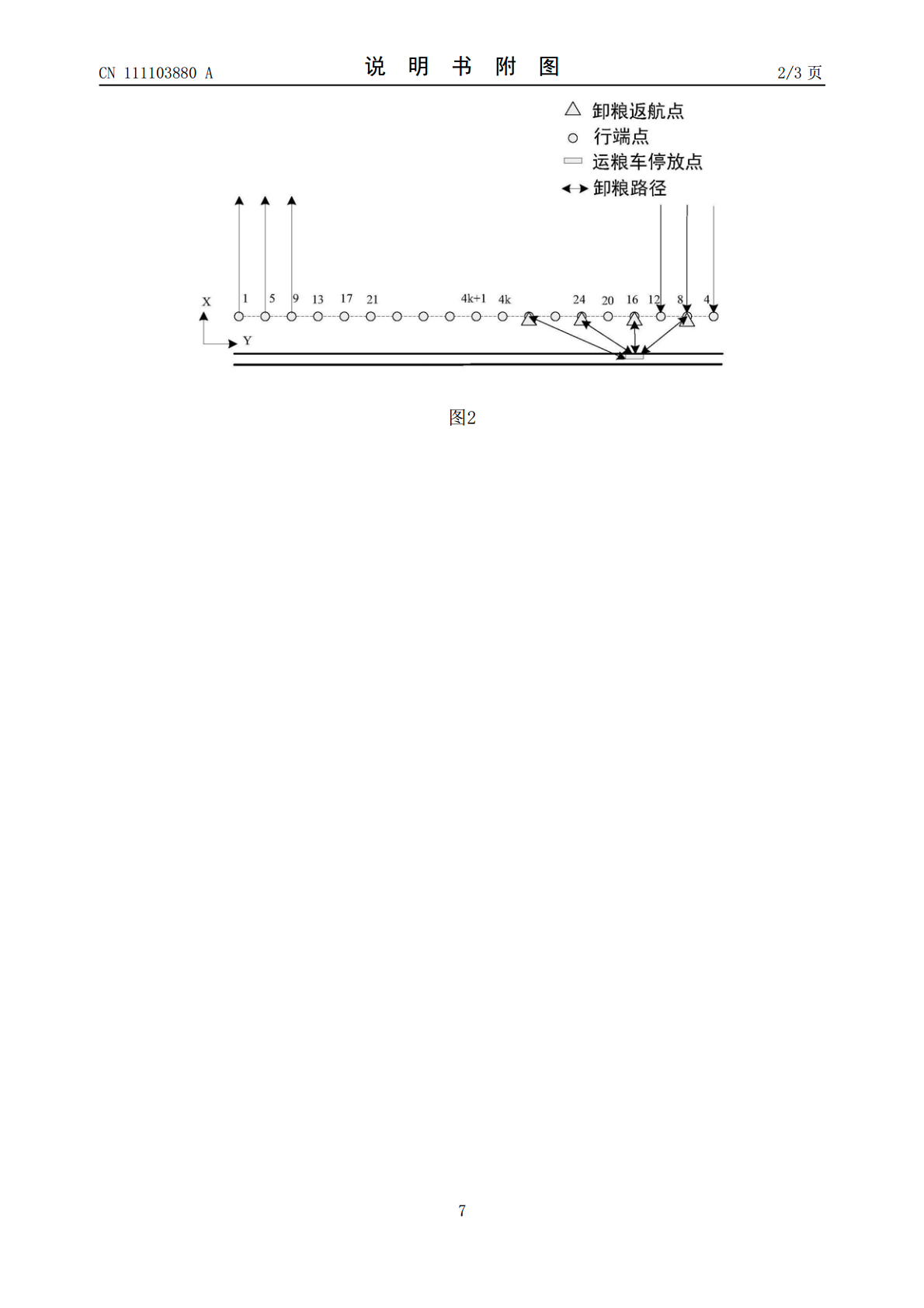
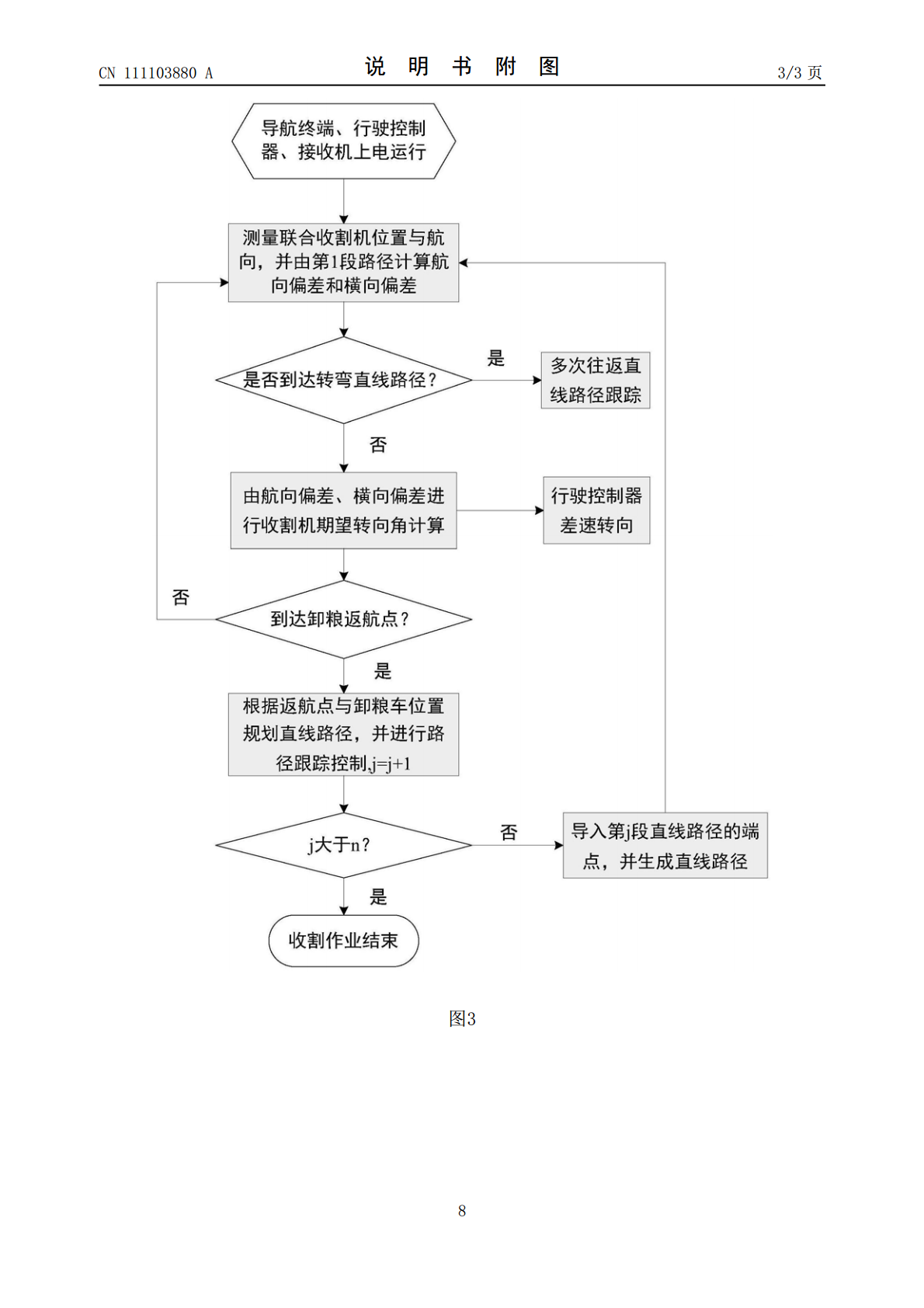
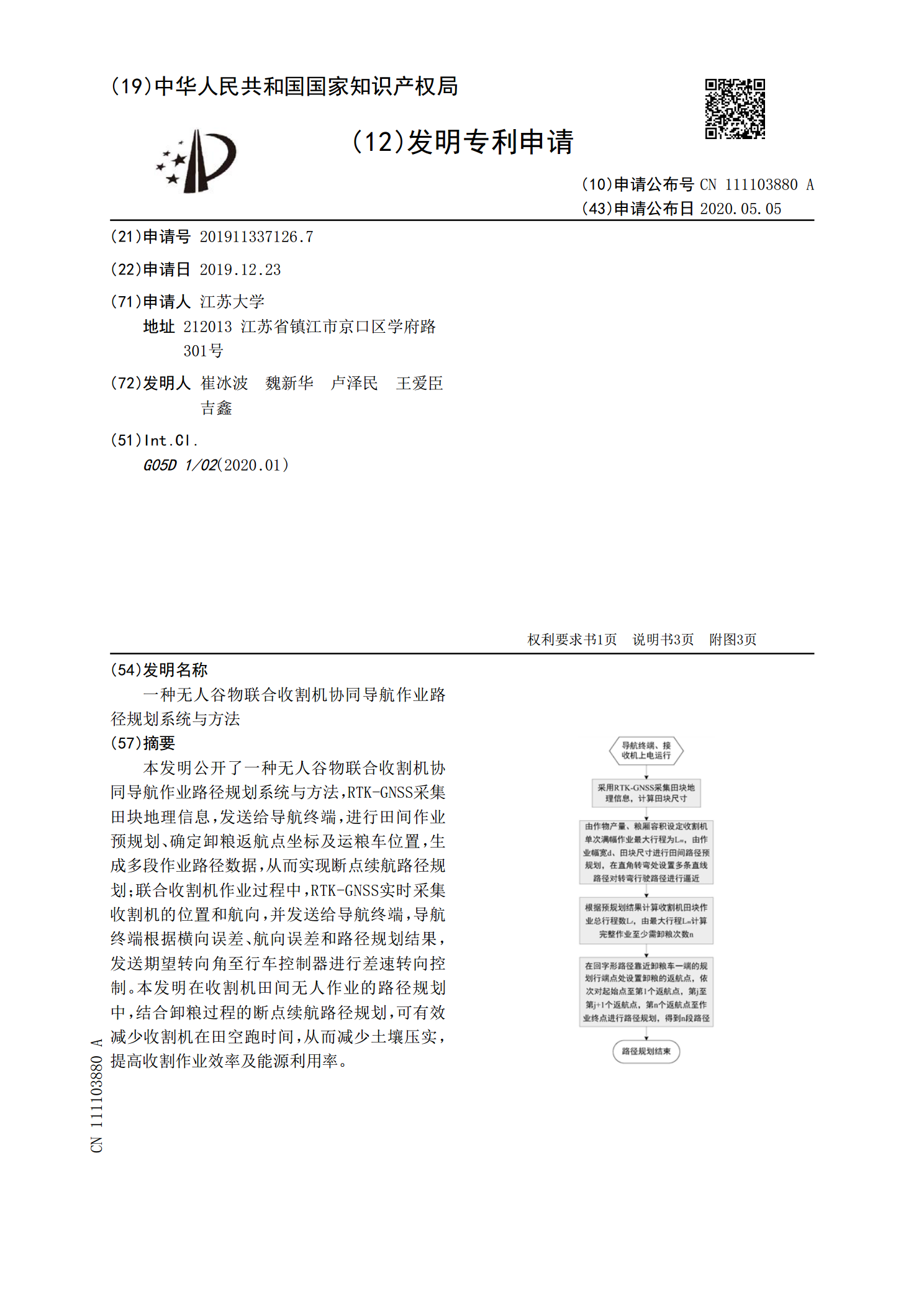
本发明公开了一种无人谷物联合收割机协同导航作业路径规划系统与方法,RTK‑GNSS采集田块地理信息,发送给导航终端,进行田间作业预规划、确定卸粮返航点坐标及运粮车位置,生成多段作业路径数据,从而实现断点续航路径规划;联合收割机作业过程中,RTK‑GNSS实时采集收割机的位置和航向,并发送给导航终端,导航终端根据横向误差、航向误差和路径规划结果,发送期望转向角至行车控制器进行差速转向控制。本发明在收割机田间无人作业的路径规划中,结合卸粮过程的断点续航路径规划,可有效减少收割机在田空跑时间,从而减少土壤压实,
一种无人作业谷物联合收割机导航方法与导航装置.pdf
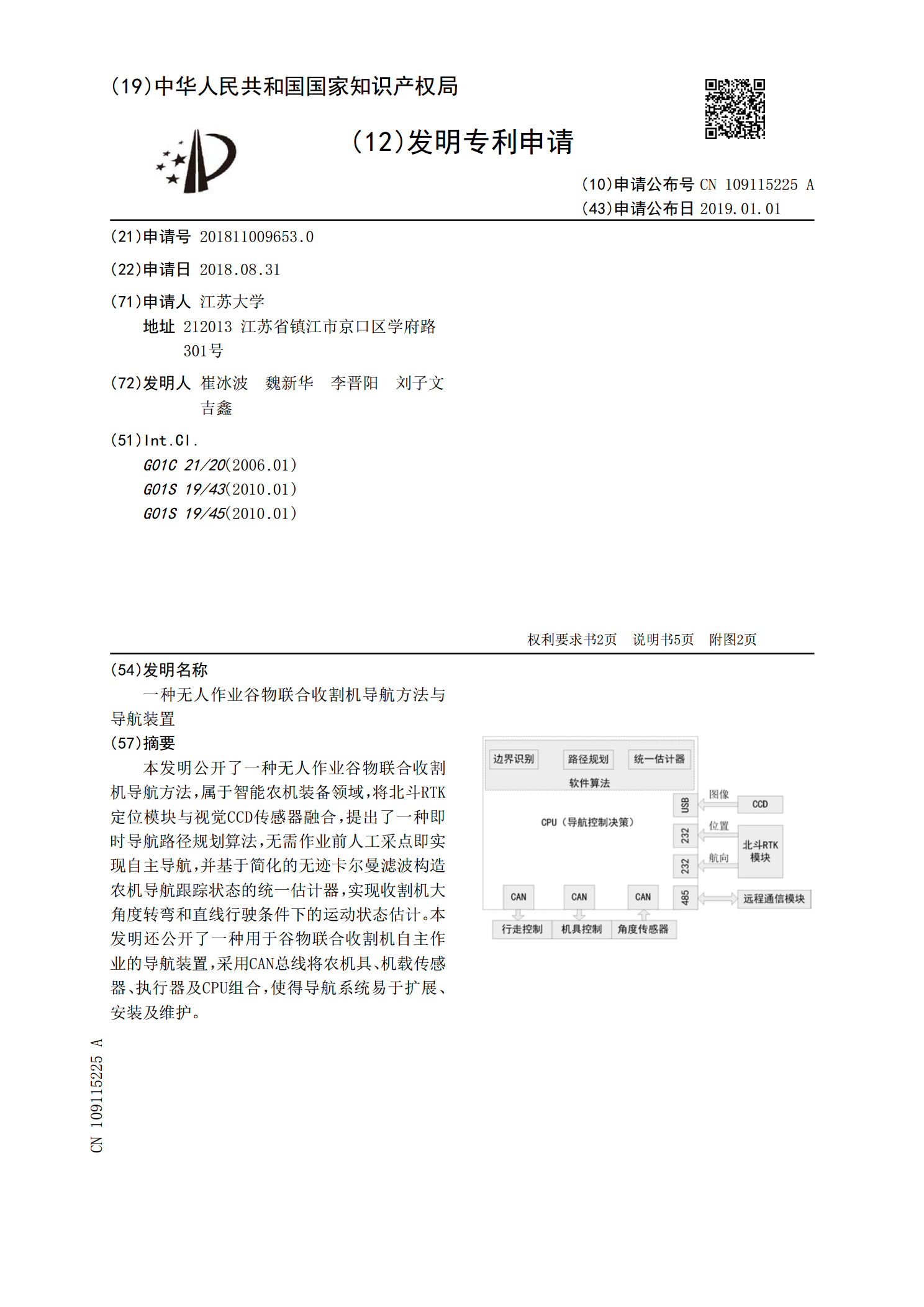
本发明公开了一种无人作业谷物联合收割机导航方法,属于智能农机装备领域,将北斗RTK定位模块与视觉CCD传感器融合,提出了一种即时导航路径规划算法,无需作业前人工采点即实现自主导航,并基于简化的无迹卡尔曼滤波构造农机导航跟踪状态的统一估计器,实现收割机大角度转弯和直线行驶条件下的运动状态估计。本发明还公开了一种用于谷物联合收割机自主作业的导航装置,采用CAN总线将农机具、机载传感器、执行器及CPU组合,使得导航系统易于扩展、安装及维护。
多谷物联合收割机与运粮车协同作业路径规划方法、系统.pdf
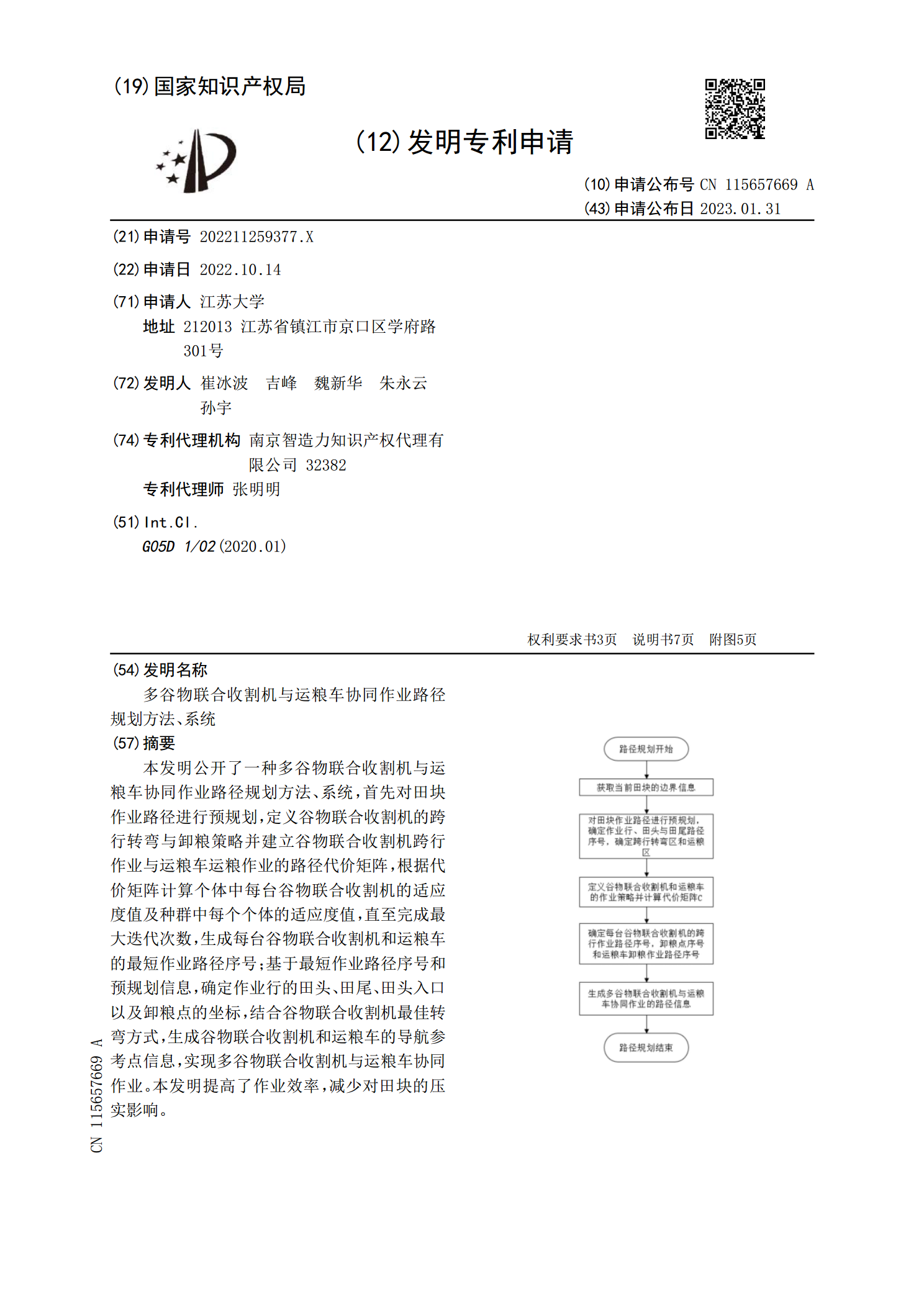
本发明公开了一种多谷物联合收割机与运粮车协同作业路径规划方法、系统,首先对田块作业路径进行预规划,定义谷物联合收割机的跨行转弯与卸粮策略并建立谷物联合收割机跨行作业与运粮车运粮作业的路径代价矩阵,根据代价矩阵计算个体中每台谷物联合收割机的适应度值及种群中每个个体的适应度值,直至完成最大迭代次数,生成每台谷物联合收割机和运粮车的最短作业路径序号;基于最短作业路径序号和预规划信息,确定作业行的田头、田尾、田头入口以及卸粮点的坐标,结合谷物联合收割机最佳转弯方式,生成谷物联合收割机和运粮车的导航参考点信息,实现
一种无人蜂群协同导航多故障检测方法.pdf
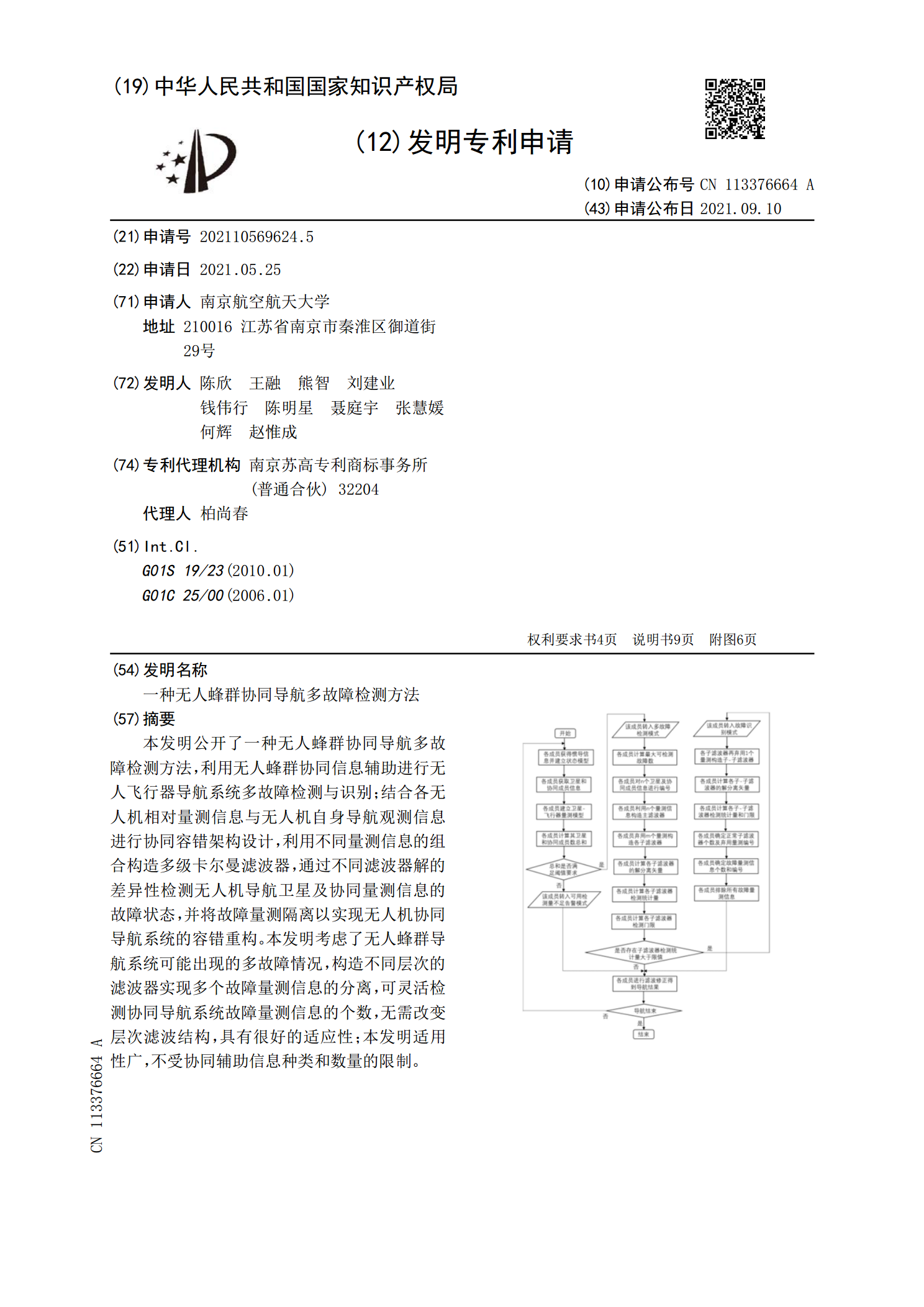
本发明公开了一种无人蜂群协同导航多故障检测方法,利用无人蜂群协同信息辅助进行无人飞行器导航系统多故障检测与识别;结合各无人机相对量测信息与无人机自身导航观测信息进行协同容错架构设计,利用不同量测信息的组合构造多级卡尔曼滤波器,通过不同滤波器解的差异性检测无人机导航卫星及协同量测信息的故障状态,并将故障量测隔离以实现无人机协同导航系统的容错重构。本发明考虑了无人蜂群导航系统可能出现的多故障情况,构造不同层次的滤波器实现多个故障量测信息的分离,可灵活检测协同导航系统故障量测信息的个数,无需改变层次滤波结构,具
一种用于无人蜂群协同导航的构型优化方法.pdf
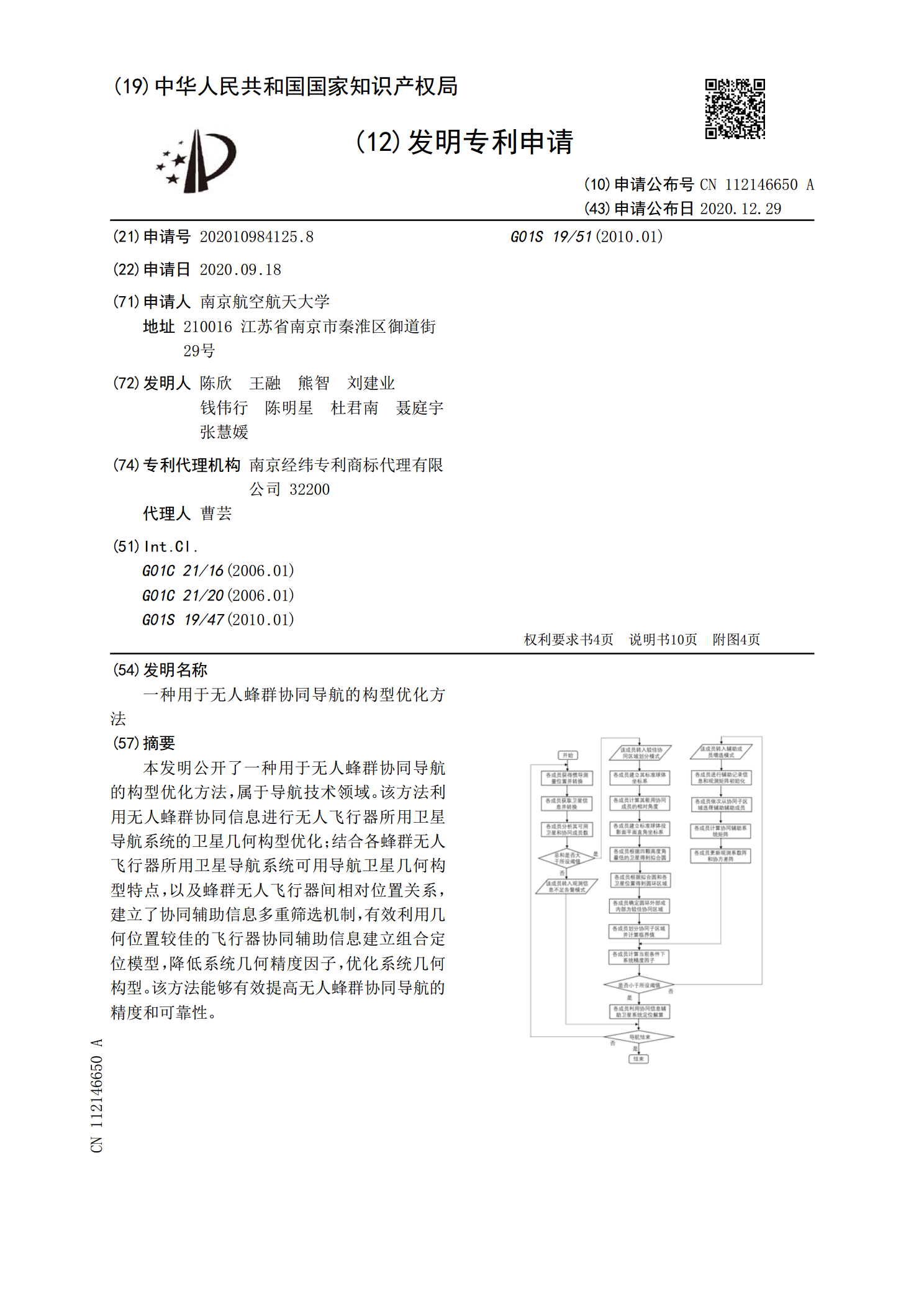
本发明公开了一种用于无人蜂群协同导航的构型优化方法,属于导航技术领域。该方法利用无人蜂群协同信息进行无人飞行器所用卫星导航系统的卫星几何构型优化;结合各蜂群无人飞行器所用卫星导航系统可用导航卫星几何构型特点,以及蜂群无人飞行器间相对位置关系,建立了协同辅助信息多重筛选机制,有效利用几何位置较佳的飞行器协同辅助信息建立组合定位模型,降低系统几何精度因子,优化系统几何构型。该方法能够有效提高无人蜂群协同导航的精度和可靠性。