
基于条码的双目视觉稻麦收割机割台高度实时检测方法.pdf

冬易****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于条码的双目视觉稻麦收割机割台高度实时检测方法.pdf
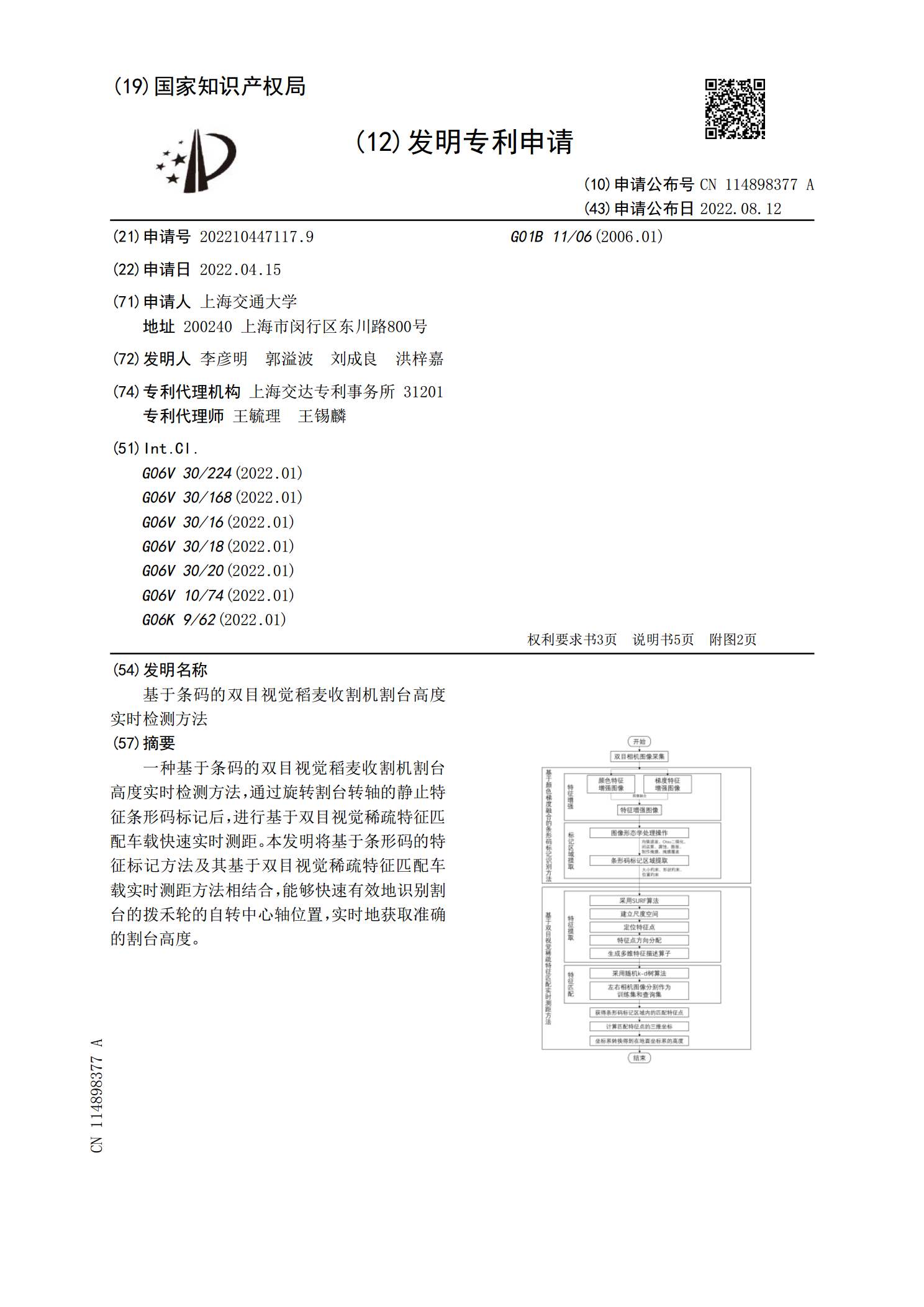
一种基于条码的双目视觉稻麦收割机割台高度实时检测方法,通过旋转割台转轴的静止特征条形码标记后,进行基于双目视觉稀疏特征匹配车载快速实时测距。本发明将基于条形码的特征标记方法及其基于双目视觉稀疏特征匹配车载实时测距方法相结合,能够快速有效地识别割台的拨禾轮的自转中心轴位置,实时地获取准确的割台高度。
基于视觉的智能稻麦收割机割幅测量方法.pdf
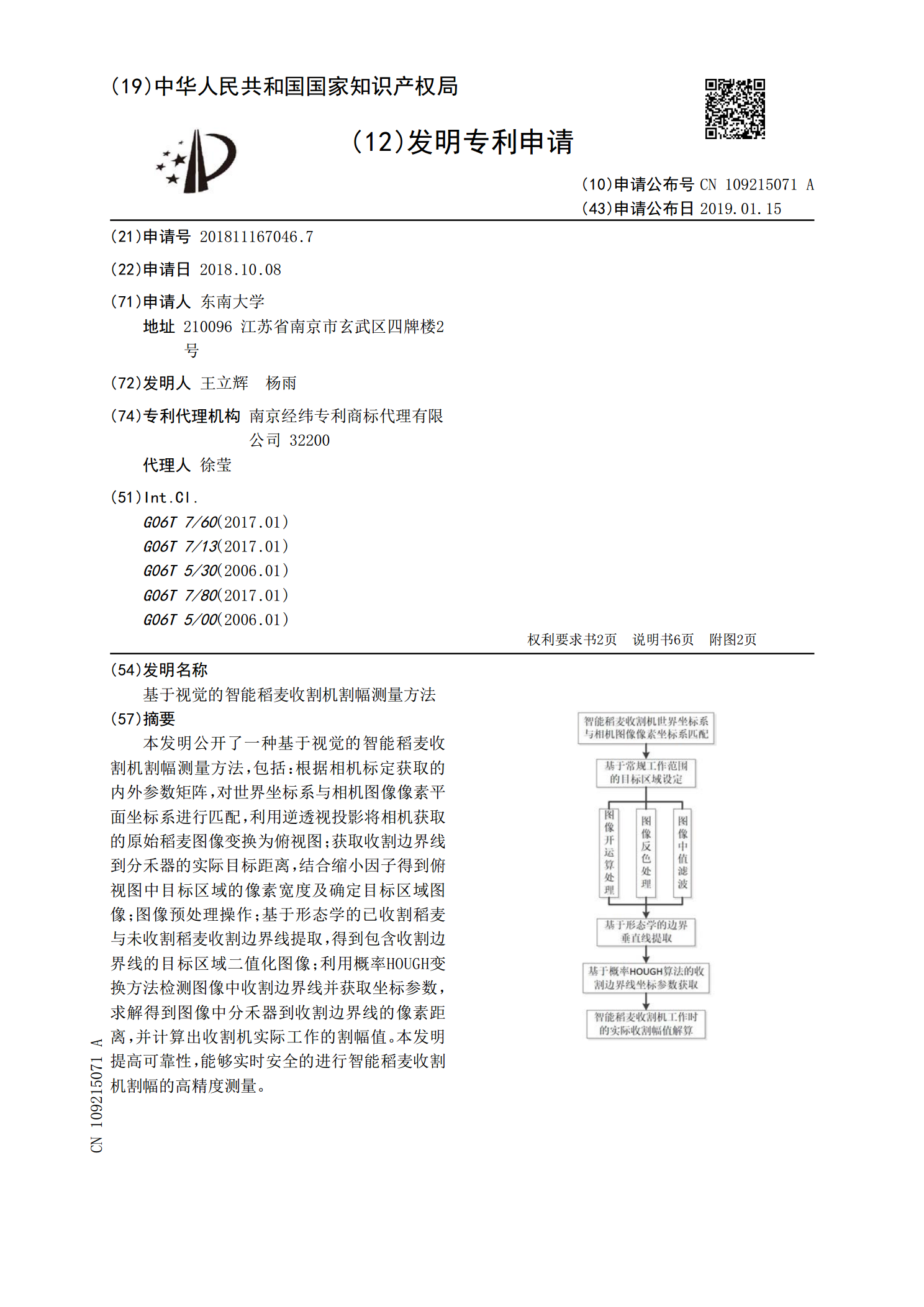
本发明公开了一种基于视觉的智能稻麦收割机割幅测量方法,包括:根据相机标定获取的内外参数矩阵,对世界坐标系与相机图像像素平面坐标系进行匹配,利用逆透视投影将相机获取的原始稻麦图像变换为俯视图;获取收割边界线到分禾器的实际目标距离,结合缩小因子得到俯视图中目标区域的像素宽度及确定目标区域图像;图像预处理操作;基于形态学的已收割稻麦与未收割稻麦收割边界线提取,得到包含收割边界线的目标区域二值化图像;利用概率HOUGH变换方法检测图像中收割边界线并获取坐标参数,求解得到图像中分禾器到收割边界线的像素距离,并计算出

割前脱粒稻麦收割机割草装置.pdf
本申请涉及一种割前脱粒稻麦收割机割草装置。本发明由推剪式切割刀的定刀、动刀、动刀驱动杆、圆筒、驱动轮、推盘、推盘轴等组成。推剪式切割刀固定在圆筒上、圆筒安装驱动轮,斜面推盘安装在推盘轴上,推盘的左右两个斜面错开180度,推盘轴固定在收割机支架上,动刀驱动杆伸入推盘两个斜面之间。工作时,圆筒由驱动轮带动旋转,动刀驱动杆在推盘两个斜面推动下左右移动,带动动刀往返循环运动,完成对作物茎秆剪切,切断的茎秆在圆筒旋转离心力作用下甩向割草装置后方。本发明的有益效果是安装方便,结构简单,工作可靠,生产成本低,功力消耗小
基于视觉的智能稻麦收割机拨禾轮位置测量方法.pdf
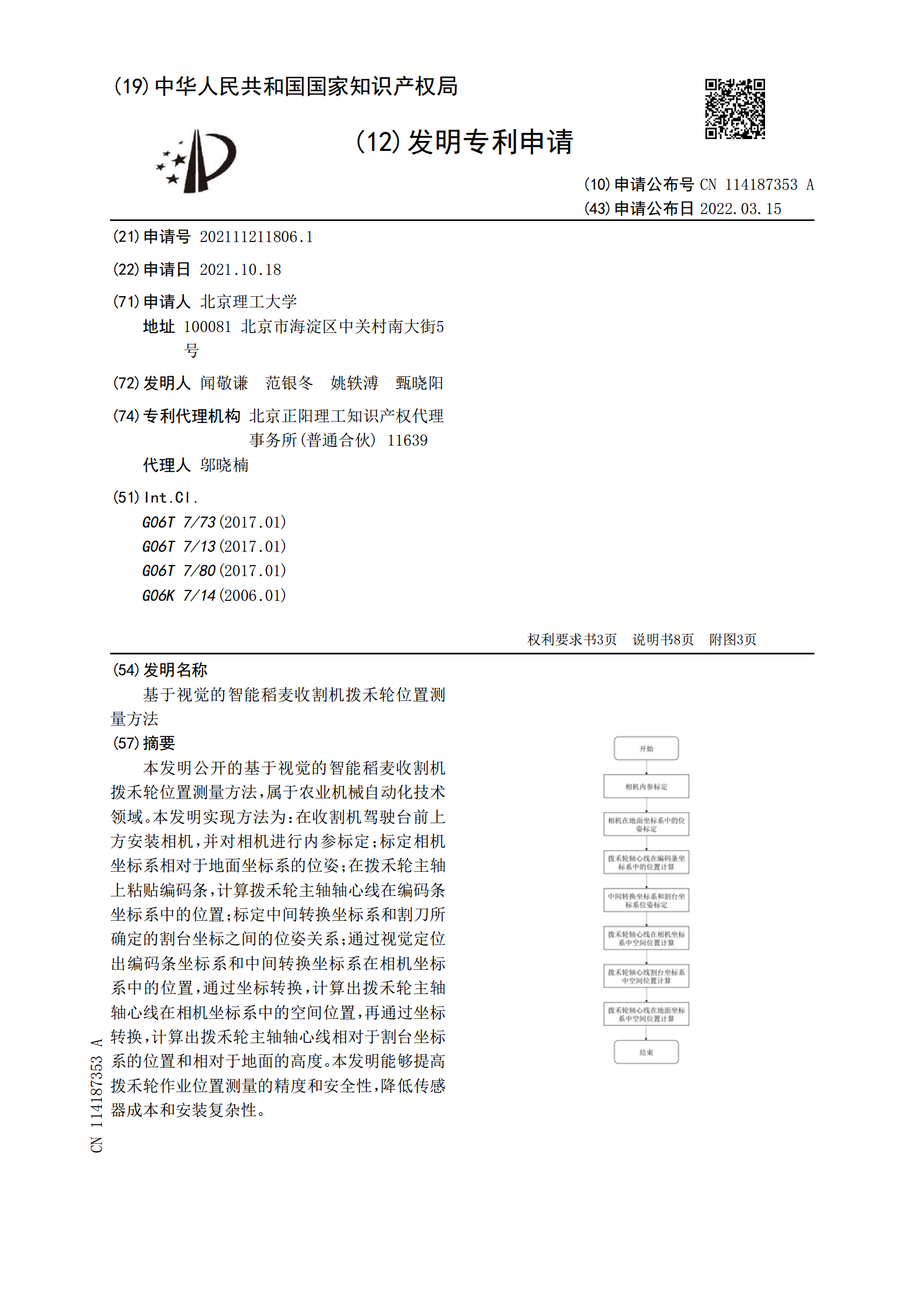
本发明公开的基于视觉的智能稻麦收割机拨禾轮位置测量方法,属于农业机械自动化技术领域。本发明实现方法为:在收割机驾驶台前上方安装相机,并对相机进行内参标定;标定相机坐标系相对于地面坐标系的位姿;在拨禾轮主轴上粘贴编码条,计算拨禾轮主轴轴心线在编码条坐标系中的位置;标定中间转换坐标系和割刀所确定的割台坐标之间的位姿关系;通过视觉定位出编码条坐标系和中间转换坐标系在相机坐标系中的位置,通过坐标转换,计算出拨禾轮主轴轴心线在相机坐标系中的空间位置,再通过坐标转换,计算出拨禾轮主轴轴心线相对于割台坐标系的位置和相对

基于双目视觉的实时坐姿检测研究.docx
基于双目视觉的实时坐姿检测研究摘要随着现代化生活方式的普及,长时间的久坐已经成为了一个群体的日常生活习惯,而不良的坐姿习惯已经影响到了人们的身体健康。因此,本文基于双目视觉的实时坐姿检测研究,将无疑有楼房发展的价值和现实意义。本文提出了一种基于双目视觉的实时坐姿检测方法,该方法可以实时地监测个人的坐姿状况并提醒用户调整坐姿。本文所提出的方法在实际应用中取得了良好的效果,具有较高的实用价值。关键词:双目视觉;实时检测;坐姿检测;健康引言在现代化的生活方式中,人们由于工作的原因,长时间保持久坐的姿势已经成为了