
动力电池单体无害化拆解分离平台及方法.pdf

绮兰****文章


1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
动力电池单体无害化拆解分离平台及方法.pdf
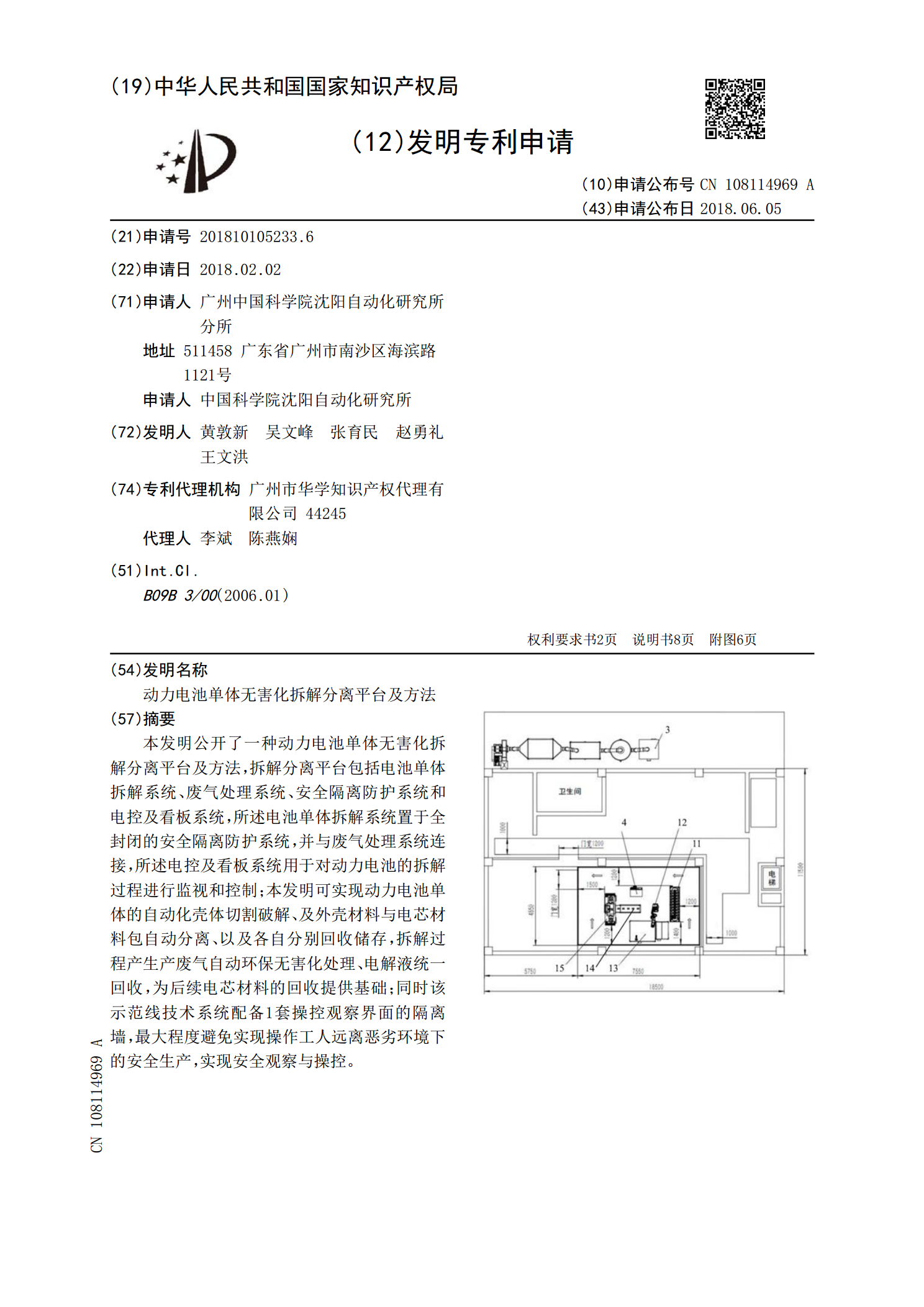
本发明公开了一种动力电池单体无害化拆解分离平台及方法,拆解分离平台包括电池单体拆解系统、废气处理系统、安全隔离防护系统和电控及看板系统,所述电池单体拆解系统置于全封闭的安全隔离防护系统,并与废气处理系统连接,所述电控及看板系统用于对动力电池的拆解过程进行监视和控制;本发明可实现动力电池单体的自动化壳体切割破解、及外壳材料与电芯材料包自动分离、以及各自分别回收储存,拆解过程产生产废气自动环保无害化处理、电解液统一回收,为后续电芯材料的回收提供基础;同时该示范线技术系统配备1套操控观察界面的隔离墙,最大程度避
一种废旧动力电池单体全自动拆解系统.pdf
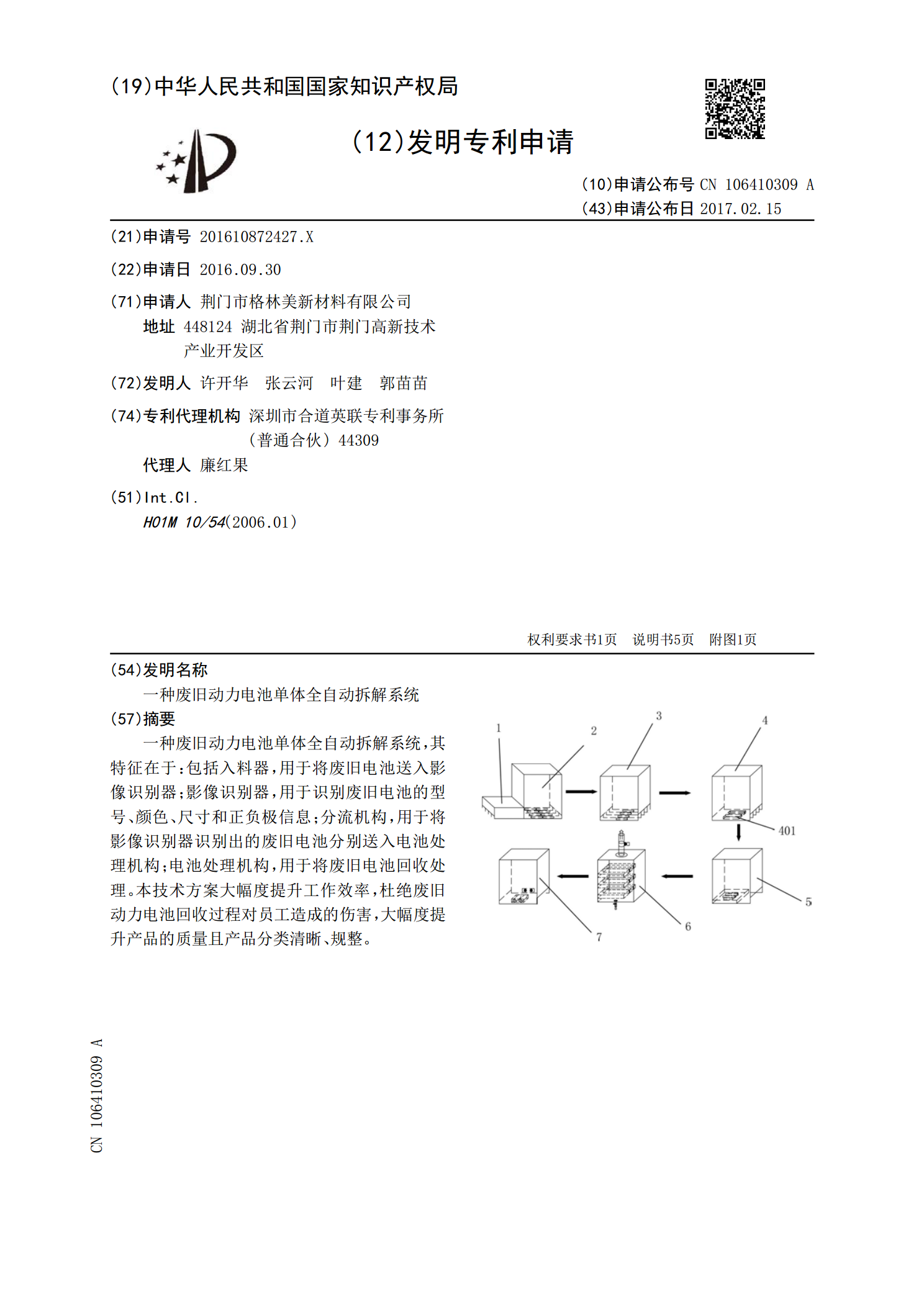
一种废旧动力电池单体全自动拆解系统,其特征在于:包括入料器,用于将废旧电池送入影像识别器;影像识别器,用于识别废旧电池的型号、颜色、尺寸和正负极信息;分流机构,用于将影像识别器识别出的废旧电池分别送入电池处理机构;电池处理机构,用于将废旧电池回收处理。本技术方案大幅度提升工作效率,杜绝废旧动力电池回收过程对员工造成的伤害,大幅度提升产品的质量且产品分类清晰、规整。

废旧干电池自动拆解分离装置及拆解分离方法.pdf
本发明公开了一种废旧干电池自动拆解分离装置及拆解分离方法,包括滚筒、皮带、砂轮组、撞针、切刀和振动筛;输送皮带上设置有多个橡胶隔板;砂轮组设置于输送皮带上;在输送皮带的第一侧设置有切刀和撞针;在输送皮带的第二侧设置有振动筛。开启第一滚轮、砂轮、切刀和撞针;一个一个地将废旧干电池安放在皮带的相邻隔板的中间固定。随着皮带的运动,废旧干电池两端被高速运转的砂轮切割掉,干电池的糊状物和碳棒被撞针从干电池的外壳内撞出,由切刀将锌皮与塑料外皮的分离。本发明的废旧干电池自动拆解分离装置及拆解分离方法,具有可实现糊状电解
一种废旧层叠式动力电池拆解及正负极片分离装置与方法.pdf
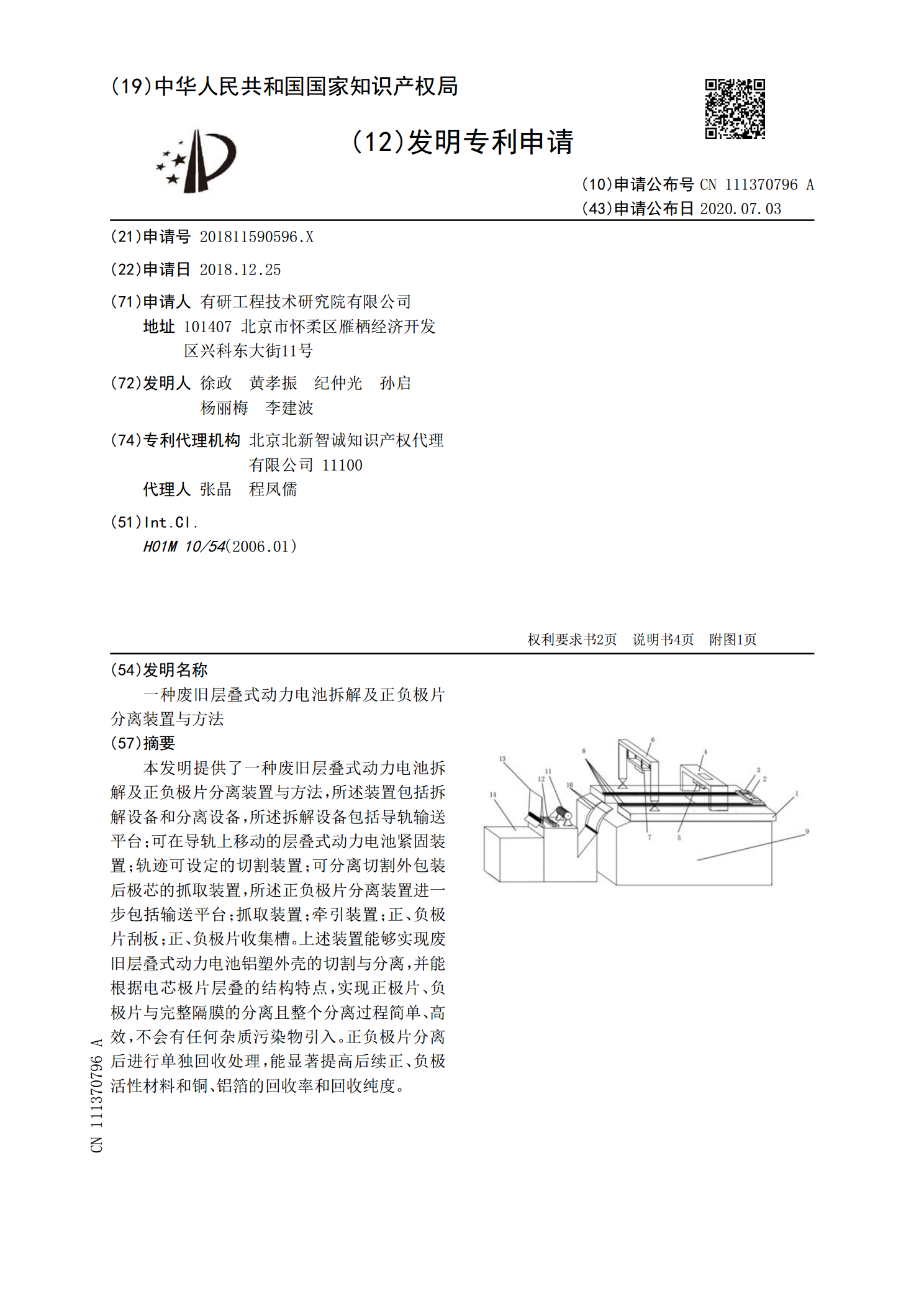
本发明提供了一种废旧层叠式动力电池拆解及正负极片分离装置与方法,所述装置包括拆解设备和分离设备,所述拆解设备包括导轨输送平台;可在导轨上移动的层叠式动力电池紧固装置;轨迹可设定的切割装置;可分离切割外包装后极芯的抓取装置,所述正负极片分离装置进一步包括输送平台;抓取装置;牵引装置;正、负极片刮板;正、负极片收集槽。上述装置能够实现废旧层叠式动力电池铝塑外壳的切割与分离,并能根据电芯极片层叠的结构特点,实现正极片、负极片与完整隔膜的分离且整个分离过程简单、高效,不会有任何杂质污染物引入。正负极片分离后进行单
一种退役动力电池拆解装置和方法.pdf
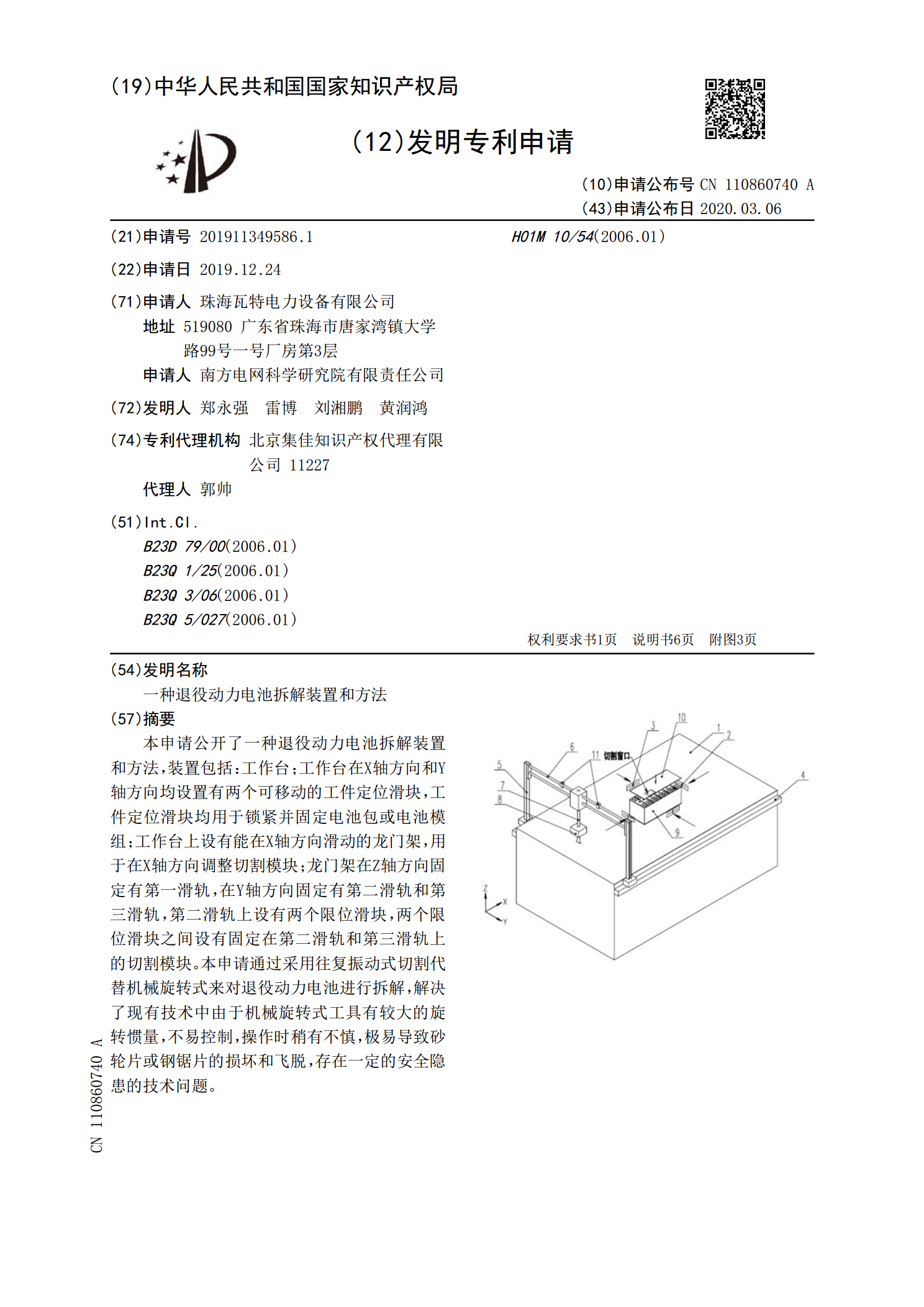
本申请公开了一种退役动力电池拆解装置和方法,装置包括:工作台;工作台在X轴方向和Y轴方向均设置有两个可移动的工件定位滑块,工件定位滑块均用于锁紧并固定电池包或电池模组;工作台上设有能在X轴方向滑动的龙门架,用于在X轴方向调整切割模块;龙门架在Z轴方向固定有第一滑轨,在Y轴方向固定有第二滑轨和第三滑轨,第二滑轨上设有两个限位滑块,两个限位滑块之间设有固定在第二滑轨和第三滑轨上的切割模块。本申请通过采用往复振动式切割代替机械旋转式来对退役动力电池进行拆解,解决了现有技术中由于机械旋转式工具有较大的旋转惯量,不