
一种全自动进料送料焊线装置.pdf

听云****君哇

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全自动进料送料焊线装置.pdf
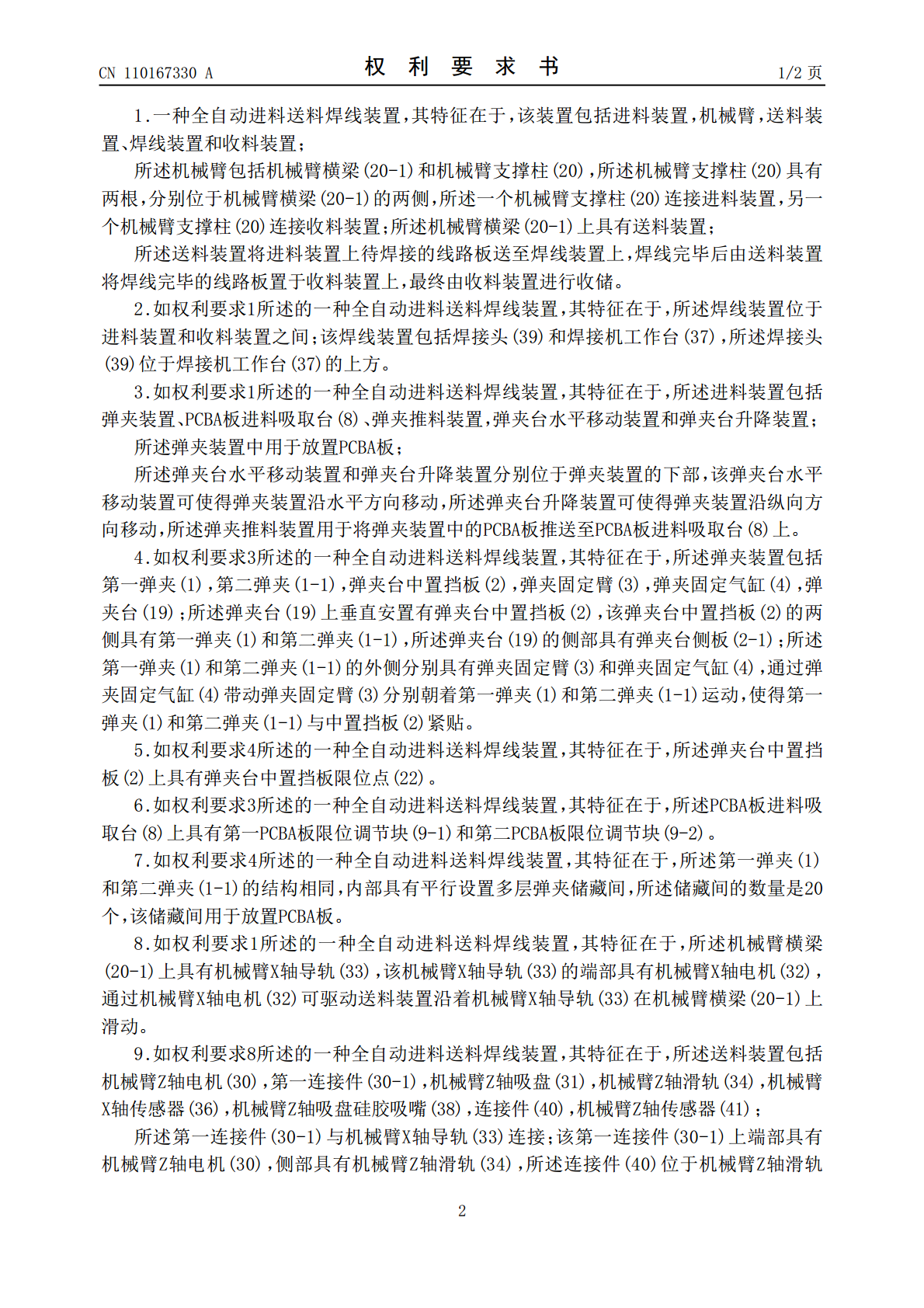
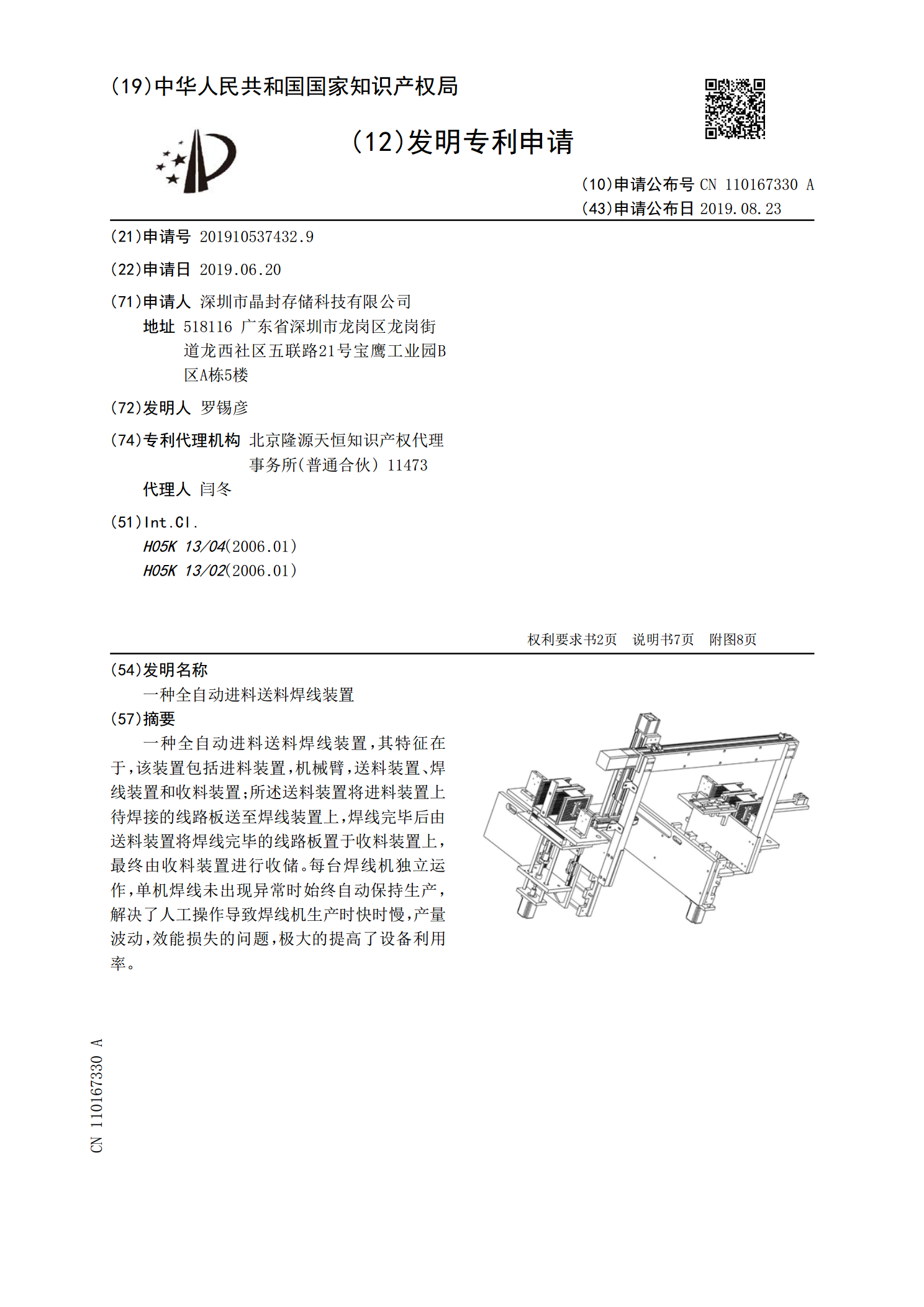
一种全自动进料送料焊线装置,其特征在于,该装置包括进料装置,机械臂,送料装置、焊线装置和收料装置;所述送料装置将进料装置上待焊接的线路板送至焊线装置上,焊线完毕后由送料装置将焊线完毕的线路板置于收料装置上,最终由收料装置进行收储。每台焊线机独立运作,单机焊线未出现异常时始终自动保持生产,解决了人工操作导致焊线机生产时快时慢,产量波动,效能损失的问题,极大的提高了设备利用率。
一种钨粉生产全自动送料装置.pdf
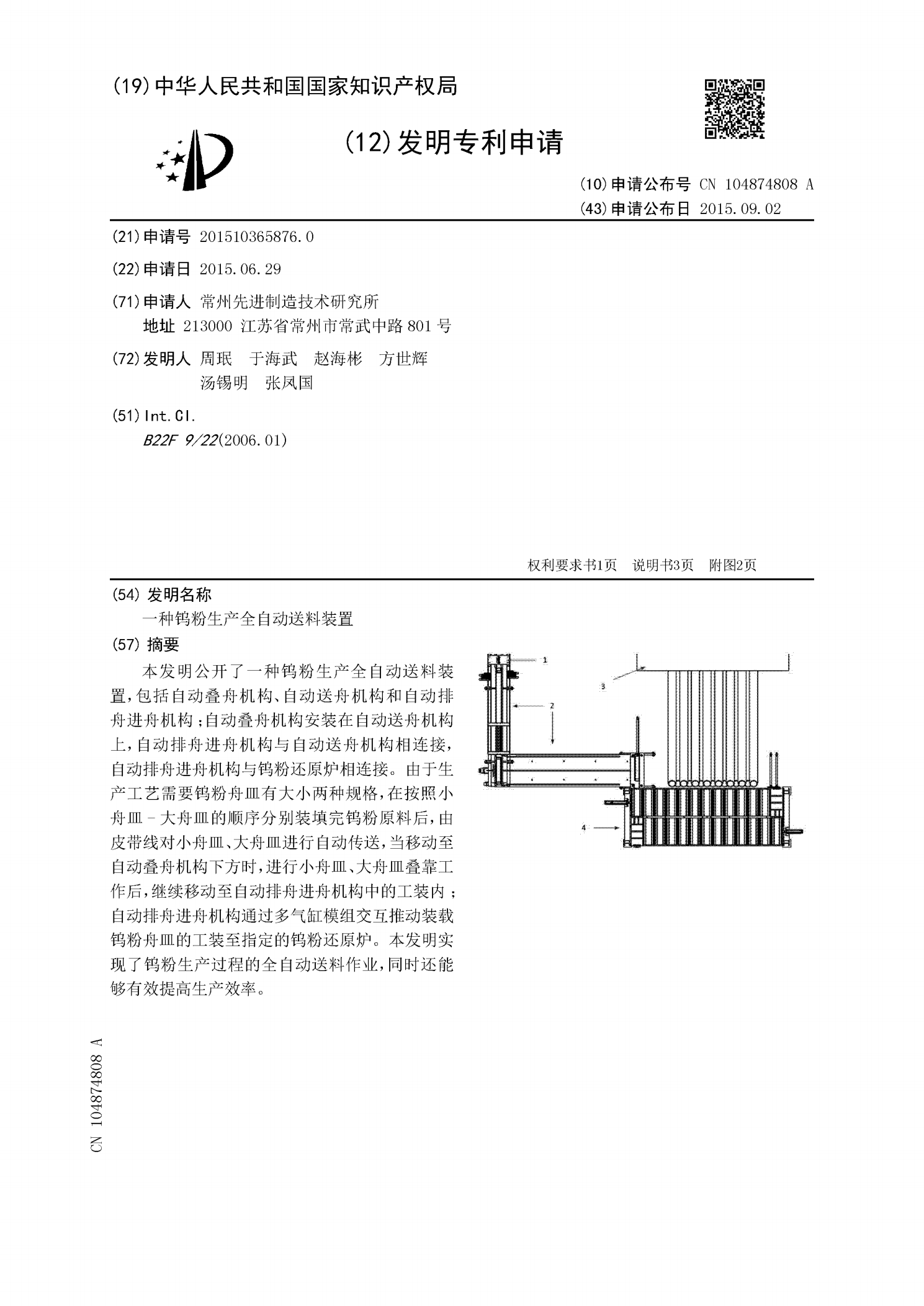
本发明公开了一种钨粉生产全自动送料装置,包括自动叠舟机构、自动送舟机构和自动排舟进舟机构;自动叠舟机构安装在自动送舟机构上,自动排舟进舟机构与自动送舟机构相连接,自动排舟进舟机构与钨粉还原炉相连接。由于生产工艺需要钨粉舟皿有大小两种规格,在按照小舟皿-大舟皿的顺序分别装填完钨粉原料后,由皮带线对小舟皿、大舟皿进行自动传送,当移动至自动叠舟机构下方时,进行小舟皿、大舟皿叠靠工作后,继续移动至自动排舟进舟机构中的工装内;自动排舟进舟机构通过多气缸模组交互推动装载钨粉舟皿的工装至指定的钨粉还原炉。本发明实现了钨

全自动送料回料翻转装置.pdf
本发明涉及全自动生产线技术领域,特指一种全自动送料回料翻转装置;本发明包括电机、固定座、上转芯、下转芯、移送轨道、转齿、皮带,其中,上转芯、下转芯可转动地安装于固定座上,上转芯位于下转芯的上方且相互平行,上转芯、下转芯沿中轴线具有移送轨道,移送轨道分别贯穿上转芯、下转芯,上转芯、下转芯的一端分别套有转齿,上转芯、下转芯的转齿相互啮合,电机通过皮带驱动下转芯;铁片夹具可沿十字轨在上转芯、下转芯内进行移动,上转芯将装有铁片的铁片夹具进行移送,下转芯将空的铁片夹具反向送回初始位置进行装铁片,使铁片夹具能够循环使
一种自动焊线机的送料组件.pdf
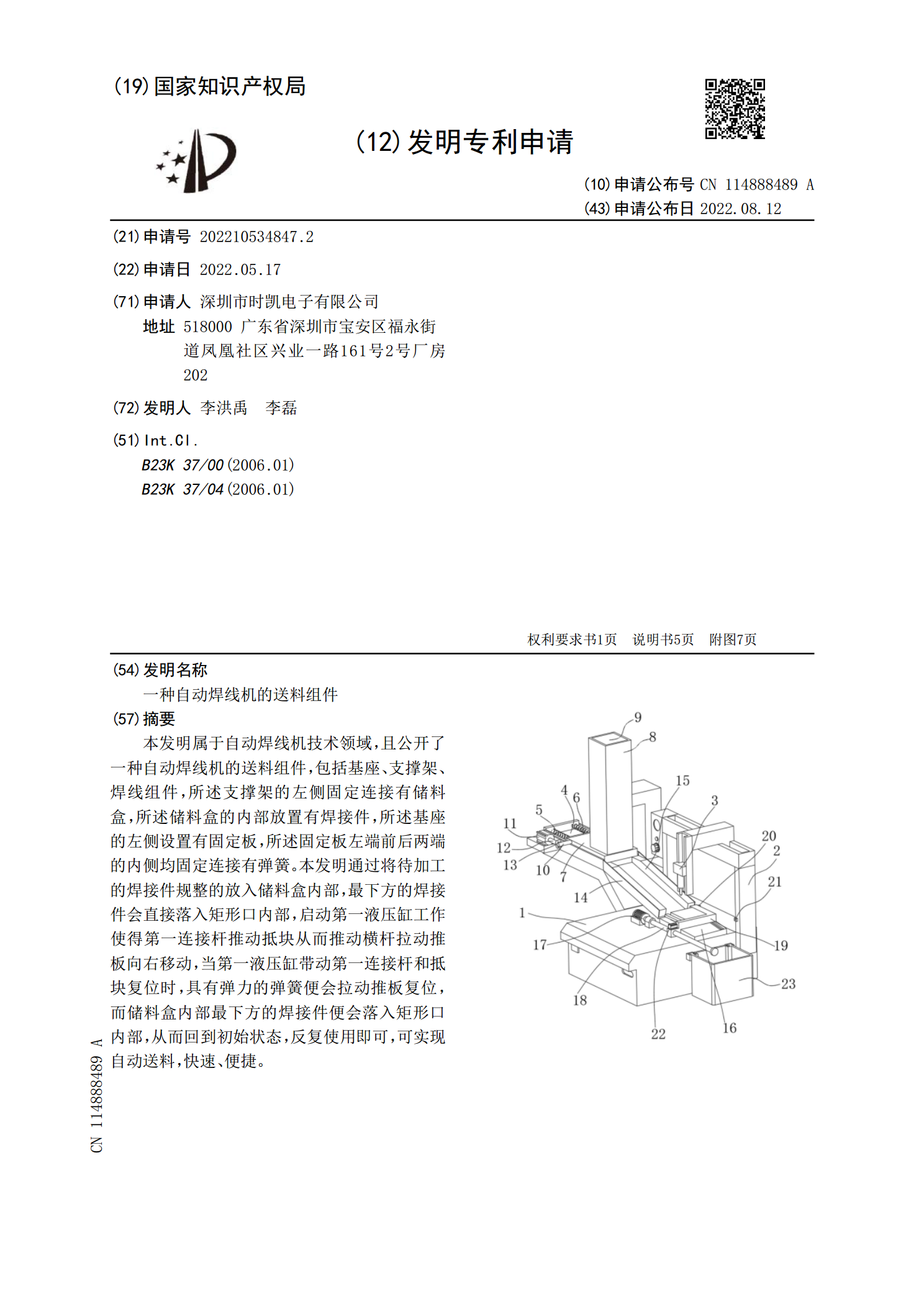
本发明属于自动焊线机技术领域,且公开了一种自动焊线机的送料组件,包括基座、支撑架、焊线组件,所述支撑架的左侧固定连接有储料盒,所述储料盒的内部放置有焊接件,所述基座的左侧设置有固定板,所述固定板左端前后两端的内侧均固定连接有弹簧。本发明通过将待加工的焊接件规整的放入储料盒内部,最下方的焊接件会直接落入矩形口内部,启动第一液压缸工作使得第一连接杆推动抵块从而推动横杆拉动推板向右移动,当第一液压缸带动第一连接杆和抵块复位时,具有弹力的弹簧便会拉动推板复位,而储料盒内部最下方的焊接件便会落入矩形口内部,从而回到

一种焊管焊缝拍片双层送料装置.pdf
本发明公开了一种焊管焊缝拍片双层送料装置,包括底座和焊管承载板,所述底座上固定有两根导轨,所述焊管承载板设有和所述导轨相配合的导向轮,所述焊管承载板上沿着所述导轨长度方向设置有至少两对下滚轮座,所述下滚轮座上设有下滚轮;所述底座沿着所述导轨长度方向上设置有两个承载支座,每一个所述承载支座设置有承载臂,所述承载臂上设置有至少一对上滚轮座,每一个所述上滚轮座上设有上滚轮。本发明结构简单紧凑、安全性好、效率高、对焊管无损伤,整个送料装置分为上下两层,每层都可放置一根焊管,一次可以放置两根焊管,送入拍片室同时进行