
非接触式三维测量定位系统、方法及存储介质.pdf

努力****爱静

1/10
2/10
3/10
4/10
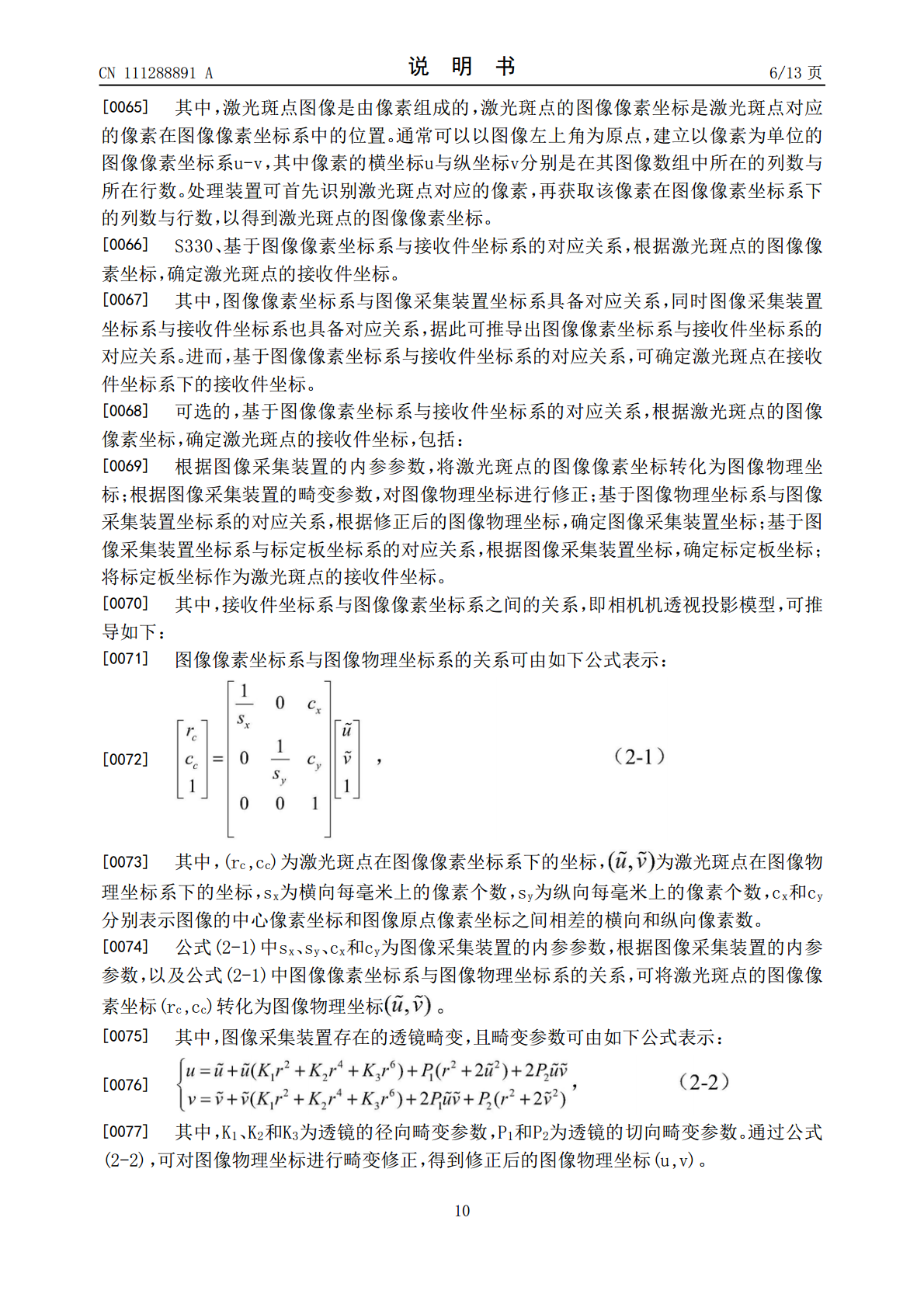
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
非接触式三维测量定位系统、方法及存储介质.pdf
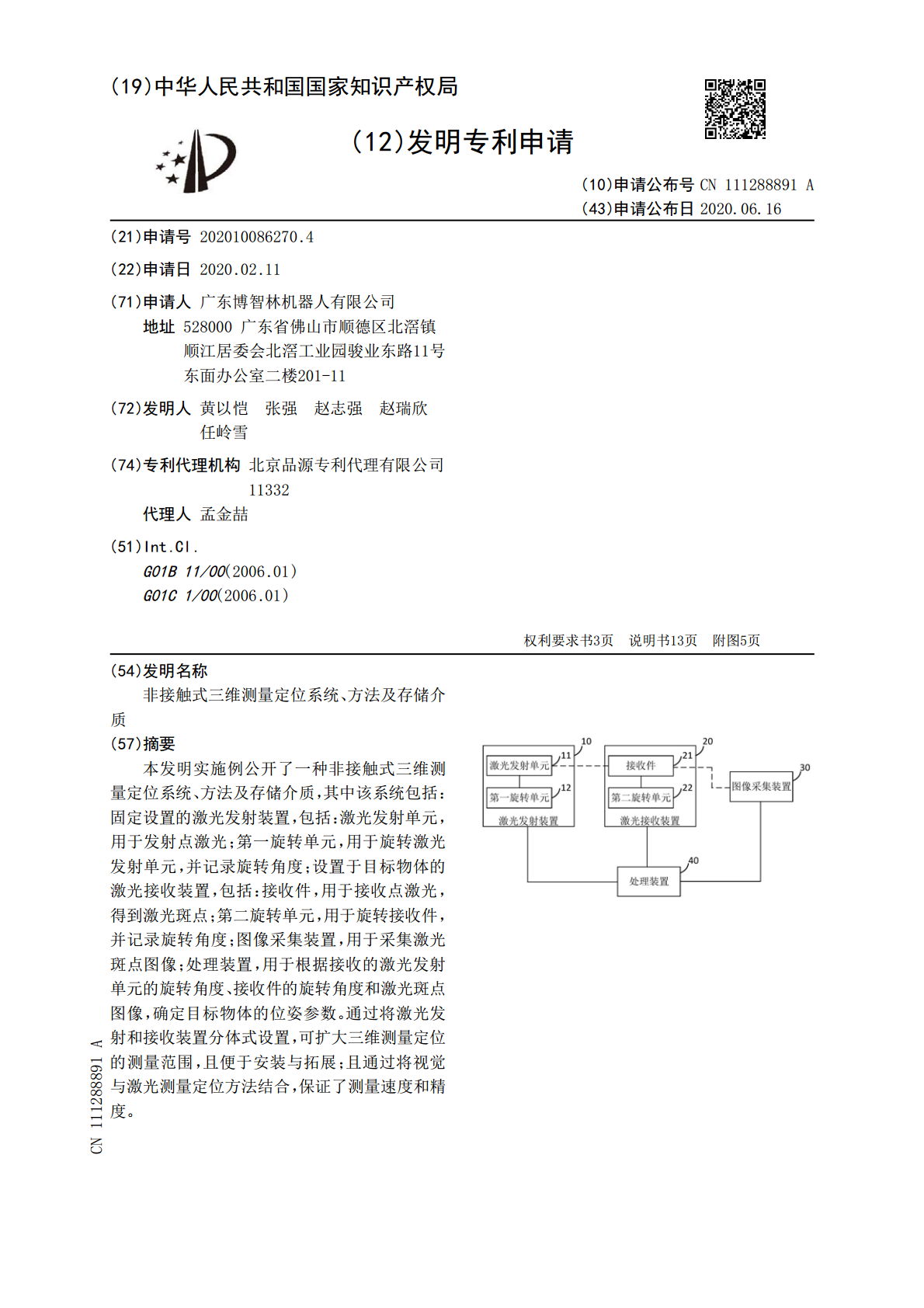
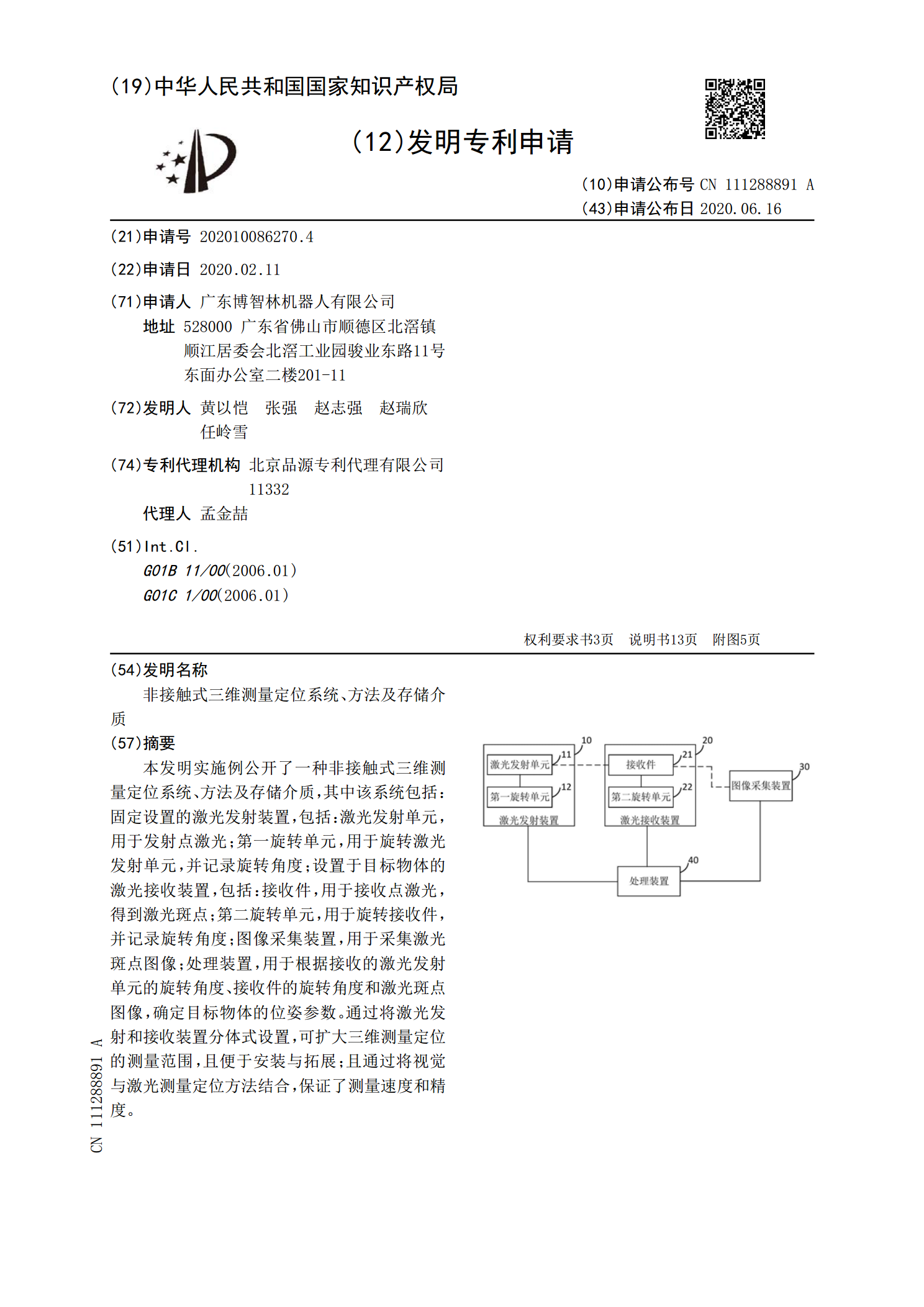
本发明实施例公开了一种非接触式三维测量定位系统、方法及存储介质,其中该系统包括:固定设置的激光发射装置,包括:激光发射单元,用于发射点激光;第一旋转单元,用于旋转激光发射单元,并记录旋转角度;设置于目标物体的激光接收装置,包括:接收件,用于接收点激光,得到激光斑点;第二旋转单元,用于旋转接收件,并记录旋转角度;图像采集装置,用于采集激光斑点图像;处理装置,用于根据接收的激光发射单元的旋转角度、接收件的旋转角度和激光斑点图像,确定目标物体的位姿参数。通过将激光发射和接收装置分体式设置,可扩大三维测量定位的测
车辆非接触式的定位方法和系统.pdf
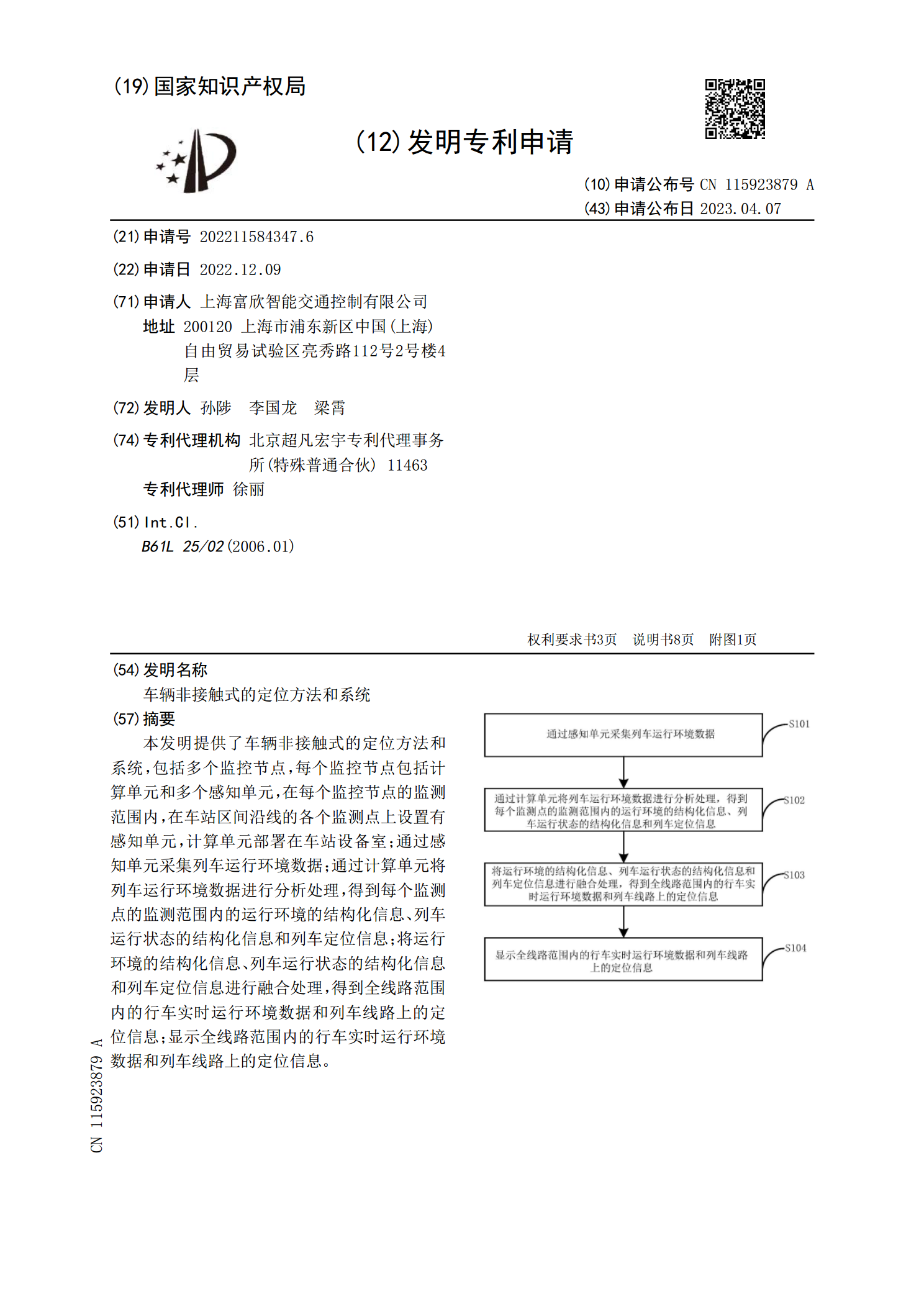
本发明提供了车辆非接触式的定位方法和系统,包括多个监控节点,每个监控节点包括计算单元和多个感知单元,在每个监控节点的监测范围内,在车站区间沿线的各个监测点上设置有感知单元,计算单元部署在车站设备室;通过感知单元采集列车运行环境数据;通过计算单元将列车运行环境数据进行分析处理,得到每个监测点的监测范围内的运行环境的结构化信息、列车运行状态的结构化信息和列车定位信息;将运行环境的结构化信息、列车运行状态的结构化信息和列车定位信息进行融合处理,得到全线路范围内的行车实时运行环境数据和列车线路上的定位信息;显示全
非接触式测量体温的方法、装置、体温计及存储介质.pdf
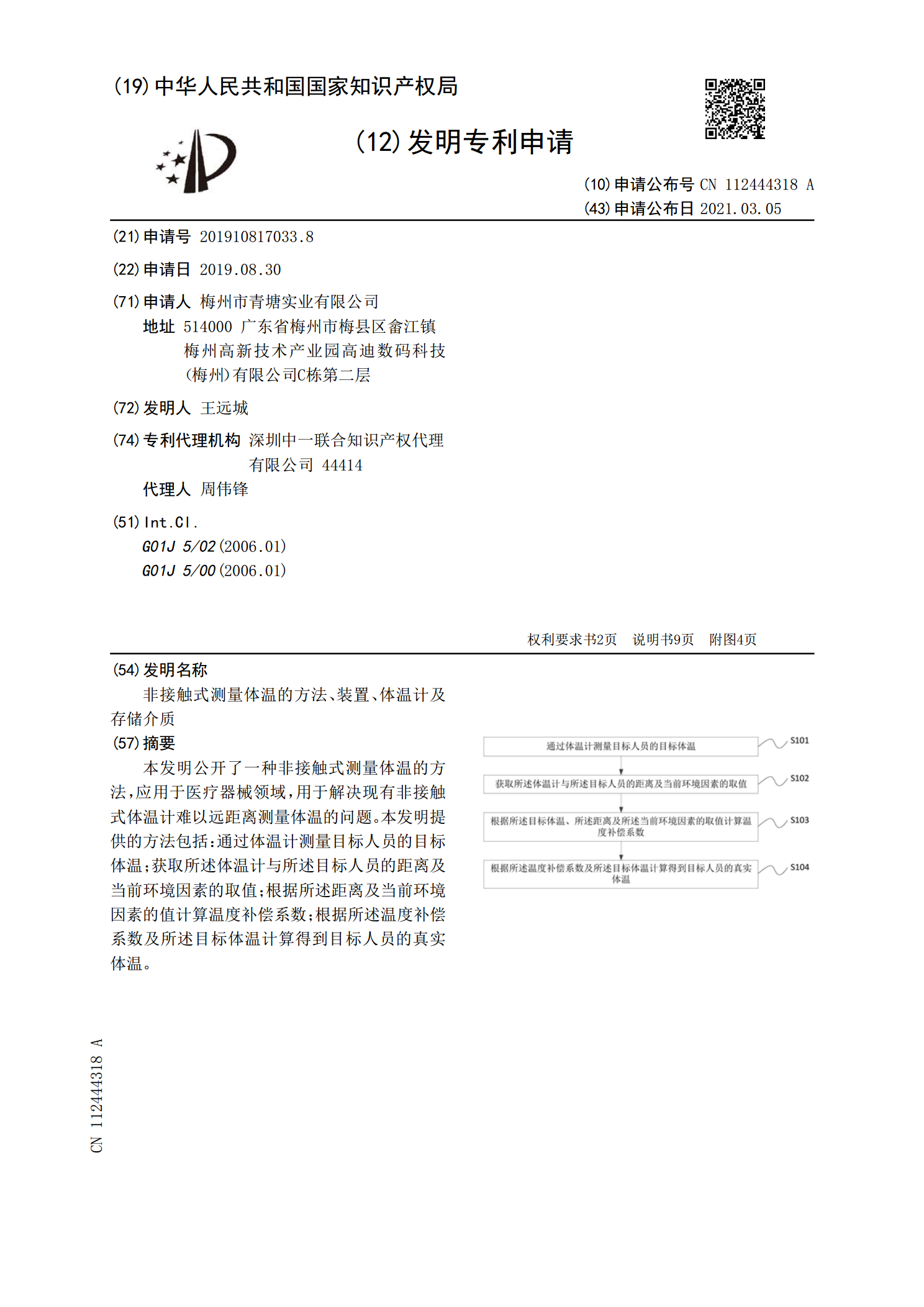
本发明公开了一种非接触式测量体温的方法,应用于医疗器械领域,用于解决现有非接触式体温计难以远距离测量体温的问题。本发明提供的方法包括:通过体温计测量目标人员的目标体温;获取所述体温计与所述目标人员的距离及当前环境因素的取值;根据所述距离及当前环境因素的值计算温度补偿系数;根据所述温度补偿系数及所述目标体温计算得到目标人员的真实体温。
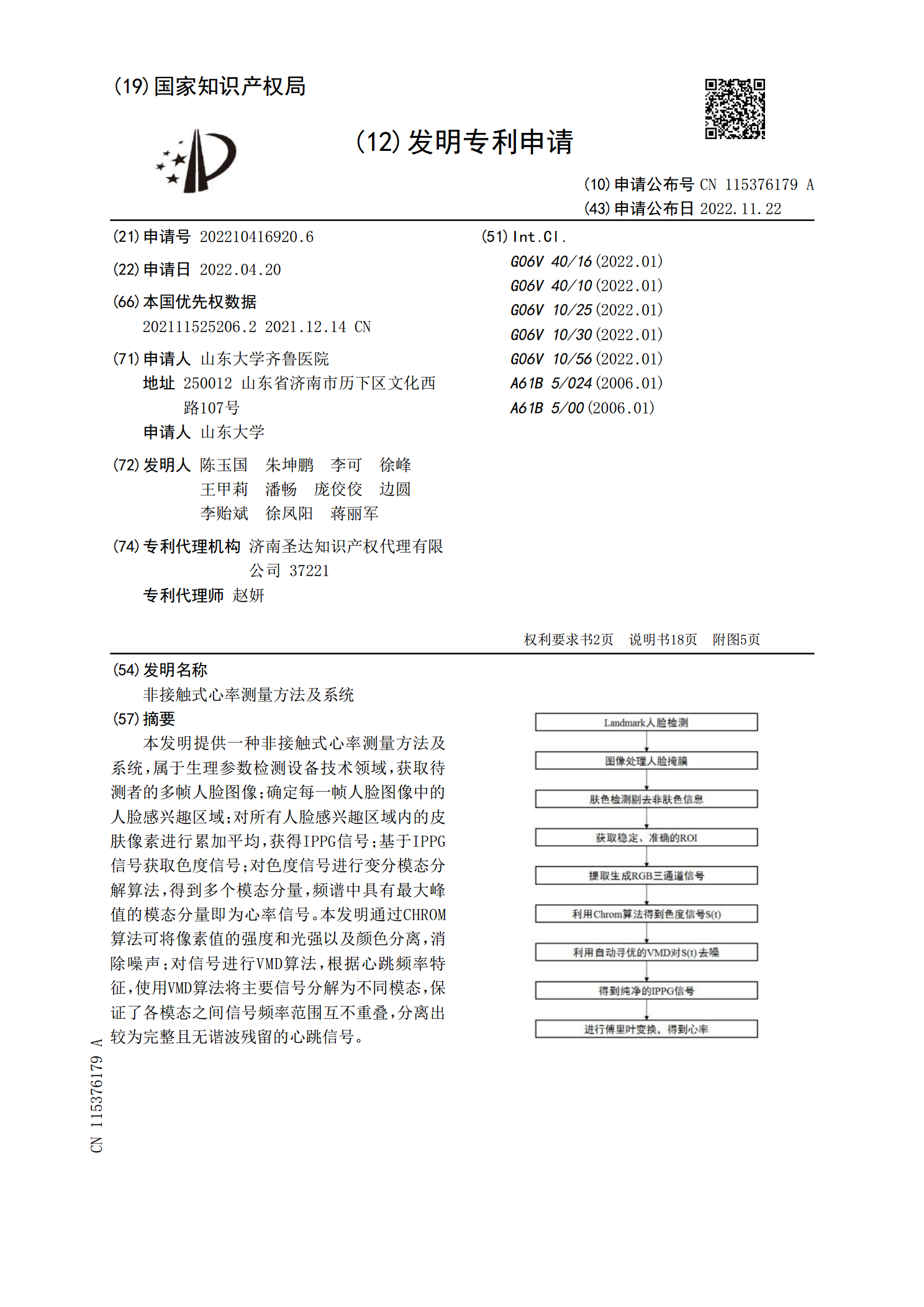
非接触式心率测量方法及系统.pdf
本发明提供一种非接触式心率测量方法及系统,属于生理参数检测设备技术领域,获取待测者的多帧人脸图像;确定每一帧人脸图像中的人脸感兴趣区域;对所有人脸感兴趣区域内的皮肤像素进行累加平均,获得IPPG信号;基于IPPG信号获取色度信号;对色度信号进行变分模态分解算法,得到多个模态分量,频谱中具有最大峰值的模态分量即为心率信号。本发明通过CHROM算法可将像素值的强度和光强以及颜色分离,消除噪声;对信号进行VMD算法,根据心跳频率特征,使用VMD算法将主要信号分解为不同模态,保证了各模态之间信号频率范围互不重叠,
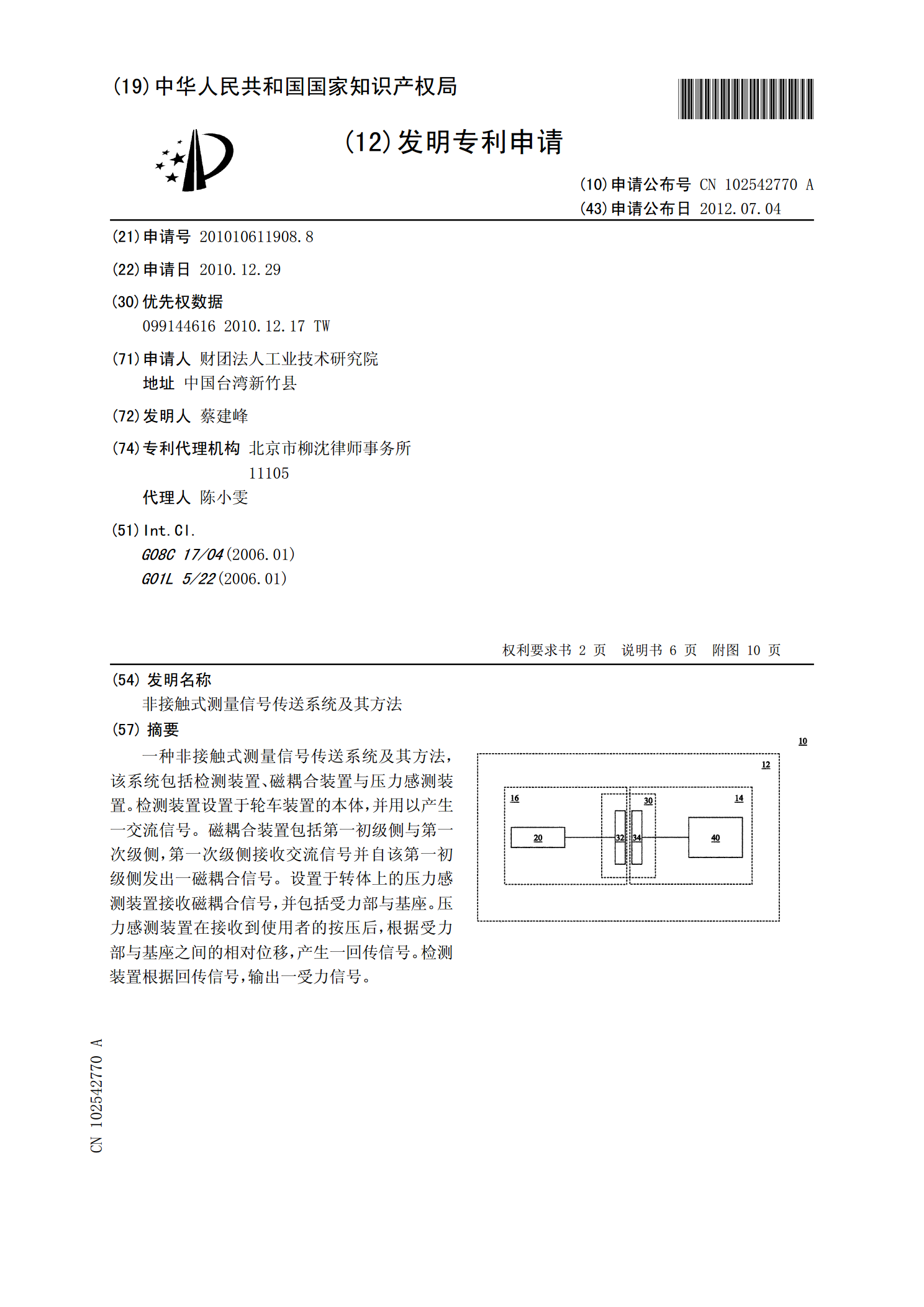
非接触式测量信号传送系统及其方法.pdf
一种非接触式测量信号传送系统及其方法,该系统包括检测装置、磁耦合装置与压力感测装置。检测装置设置于轮车装置的本体,并用以产生一交流信号。磁耦合装置包括第一初级侧与第一次级侧,第一次级侧接收交流信号并自该第一初级侧发出一磁耦合信号。设置于转体上的压力感测装置接收磁耦合信号,并包括受力部与基座。压力感测装置在接收到使用者的按压后,根据受力部与基座之间的相对位移,产生一回传信号。检测装置根据回传信号,输出一受力信号。