
基于移动和差互质阵空洞填充的信号定位算法.pdf

波峻****99

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于移动和差互质阵空洞填充的信号定位算法.pdf
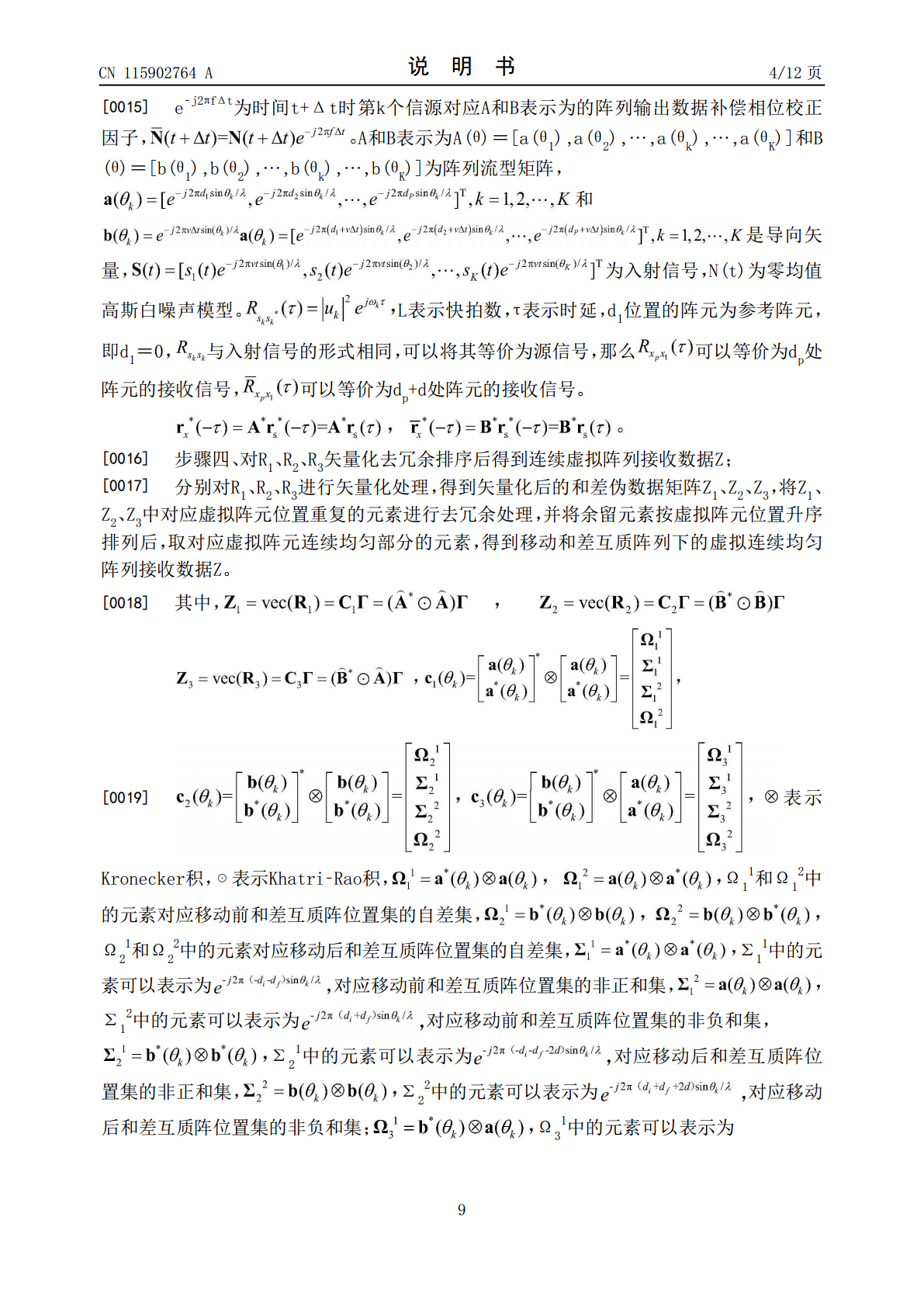
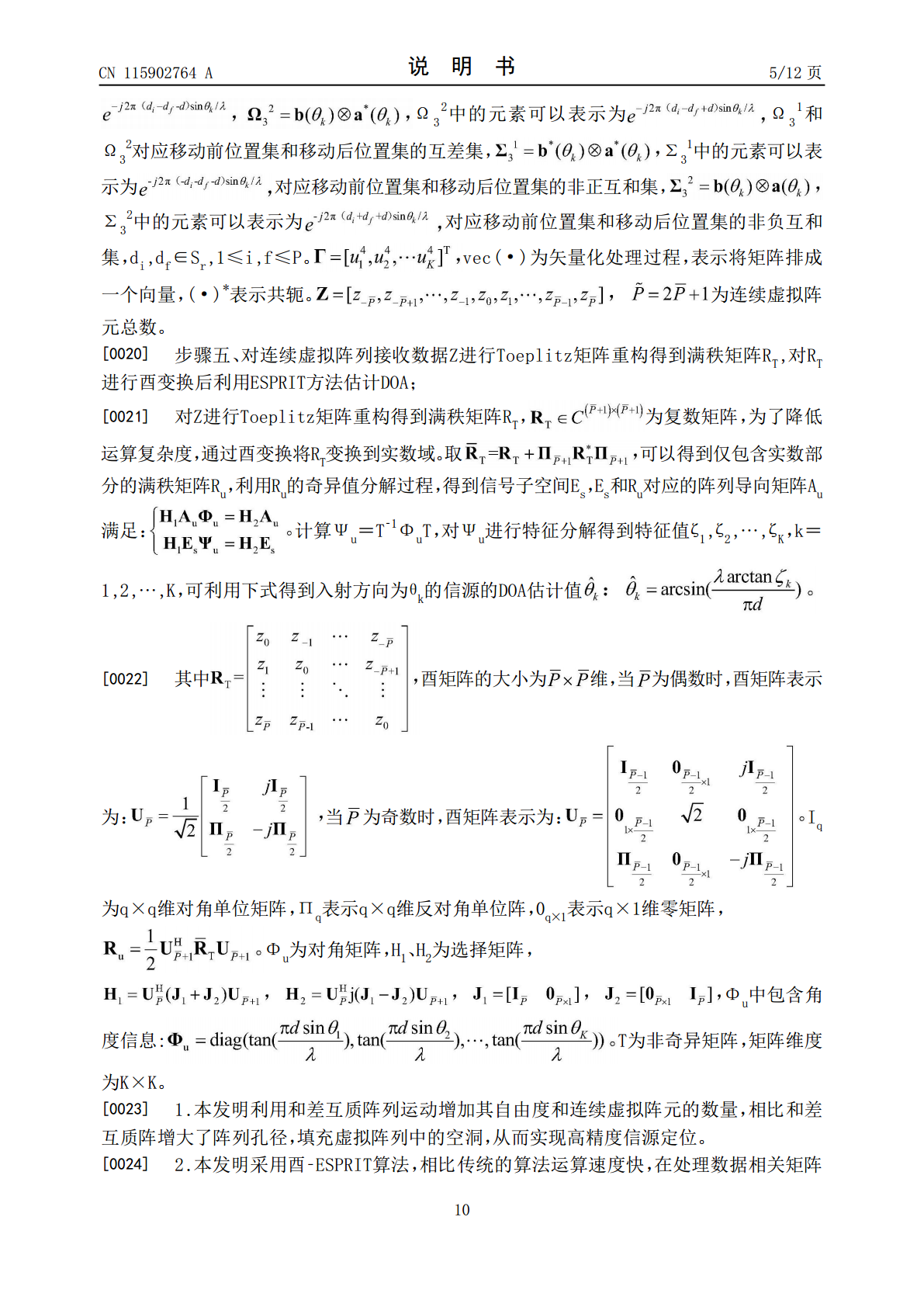
本发明是在和差互质阵列信号的处理基础上,利用稀疏阵列运动可以增加可实现的自由度和连续虚拟阵元的数量,减少了虚拟阵列空洞,进一步增大阵列自由度,令算法计算量降低,实现高精度信源定位;对移动和差互质阵列接收数据的自协方差数据矩阵和互协方差数据矩阵矢量化去冗余后,重新排序得到连续虚拟阵列接收数据;将连续虚拟阵列单次快拍的接收数据进行矩阵重构后得到满秩矩阵,再对满秩矩阵进行酉变换得到实矩阵;对酉变换的数据矩阵进行特征分解得到信号子空间,最后利用ESPRIT算法求得入射方向为θ
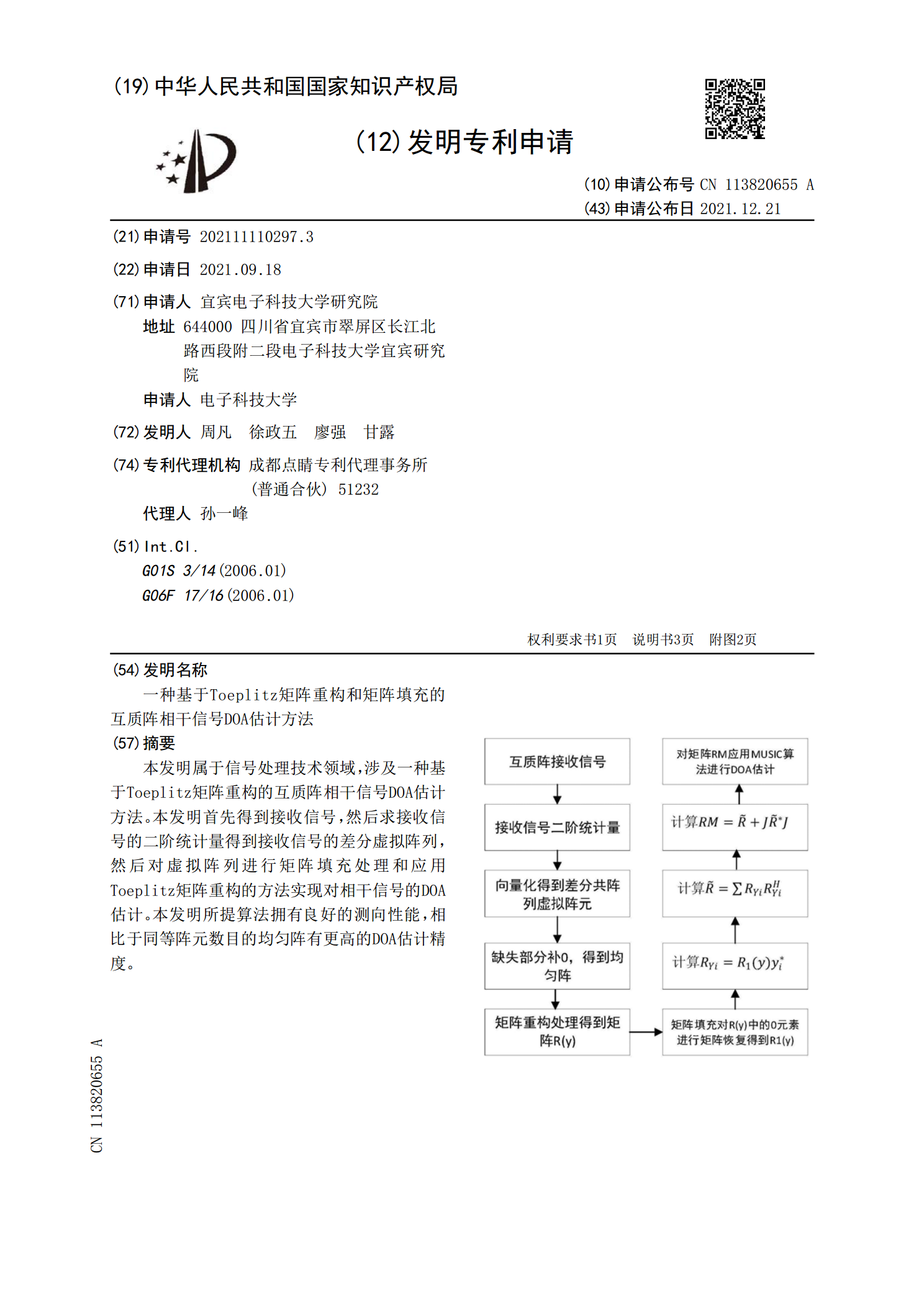
一种基于Toeplitz矩阵重构和矩阵填充的互质阵相干信号DOA估计方法.pdf
本发明属于信号处理技术领域,涉及一种基于Toeplitz矩阵重构的互质阵相干信号DOA估计方法。本发明首先得到接收信号,然后求接收信号的二阶统计量得到接收信号的差分虚拟阵列,然后对虚拟阵列进行矩阵填充处理和应用Toeplitz矩阵重构的方法实现对相干信号的DOA估计。本发明所提算法拥有良好的测向性能,相比于同等阵元数目的均匀阵有更高的DOA估计精度。
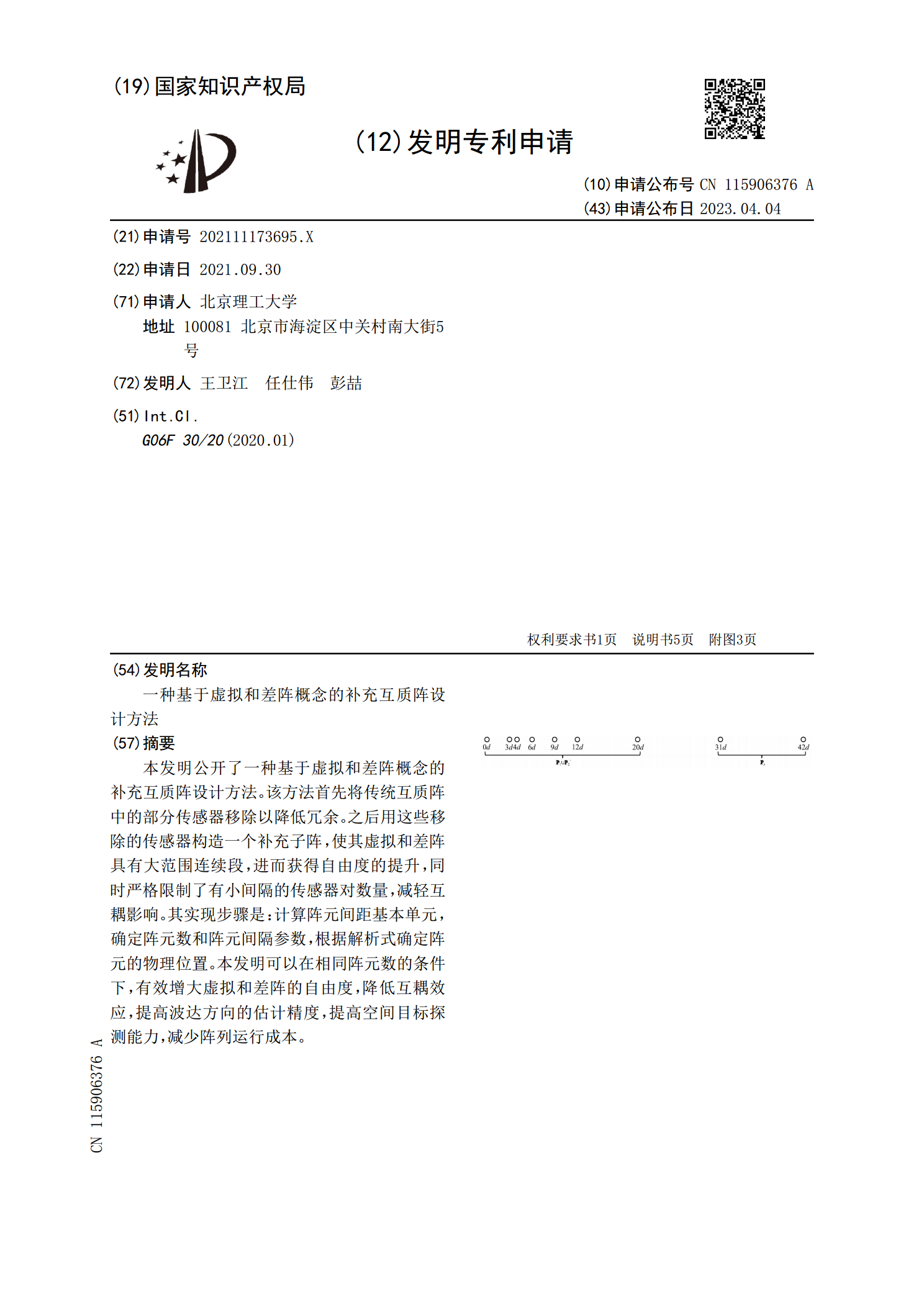
一种基于虚拟和差阵概念的补充互质阵设计方法.pdf
本发明公开了一种基于虚拟和差阵概念的补充互质阵设计方法。该方法首先将传统互质阵中的部分传感器移除以降低冗余。之后用这些移除的传感器构造一个补充子阵,使其虚拟和差阵具有大范围连续段,进而获得自由度的提升,同时严格限制了有小间隔的传感器对数量,减轻互耦影响。其实现步骤是:计算阵元间距基本单元,确定阵元数和阵元间隔参数,根据解析式确定阵元的物理位置。本发明可以在相同阵元数的条件下,有效增大虚拟和差阵的自由度,降低互耦效应,提高波达方向的估计精度,提高空间目标探测能力,减少阵列运行成本。
基于移动手机定位算法的聚集人群追踪系统和方法.pdf
基于移动手机定位算法的聚集人群追踪系统,包括一个或多个测试点,测试点发送蓝牙探测信号或者WIFI探测信号,并接收对第一目标点和多个第二目标点的反馈信号,并将反馈信号发送到数据收集装置;数据收集装置将反馈信号发送给数据分析装置;数据分析装置确定与第一目标点的行动轨迹距离为第一距离阈值范围内的第二目标点,将符合的第二目标点加入密切接触者列表。对目标点的定位使用的是相对位置,所以比运营商的跟踪系统保密性要好。目标点中被感染用户确诊以后,有几种方式联系密切接触者:已经安装测试应用程序的用户自然可以收到通知;用户可
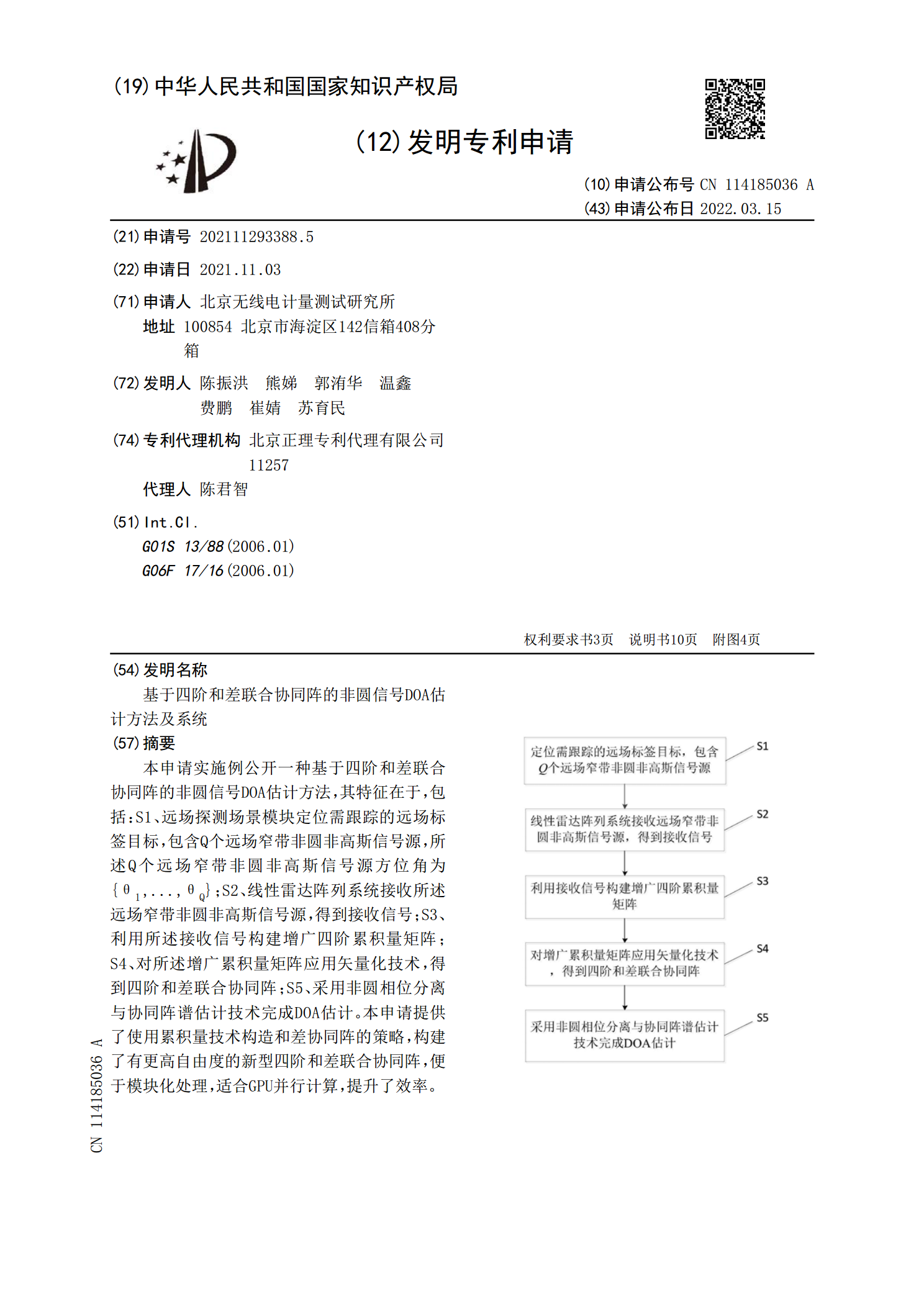
基于四阶和差联合协同阵的非圆信号DOA估计方法及系统.pdf
本申请实施例公开一种基于四阶和差联合协同阵的非圆信号DOA估计方法,其特征在于,包括:S1、远场探测场景模块定位需跟踪的远场标签目标,包含Q个远场窄带非圆非高斯信号源,所述Q个远场窄带非圆非高斯信号源方位角为{θ