
基于四阶和差联合协同阵的非圆信号DOA估计方法及系统.pdf

子安****吖吖

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于四阶和差联合协同阵的非圆信号DOA估计方法及系统.pdf
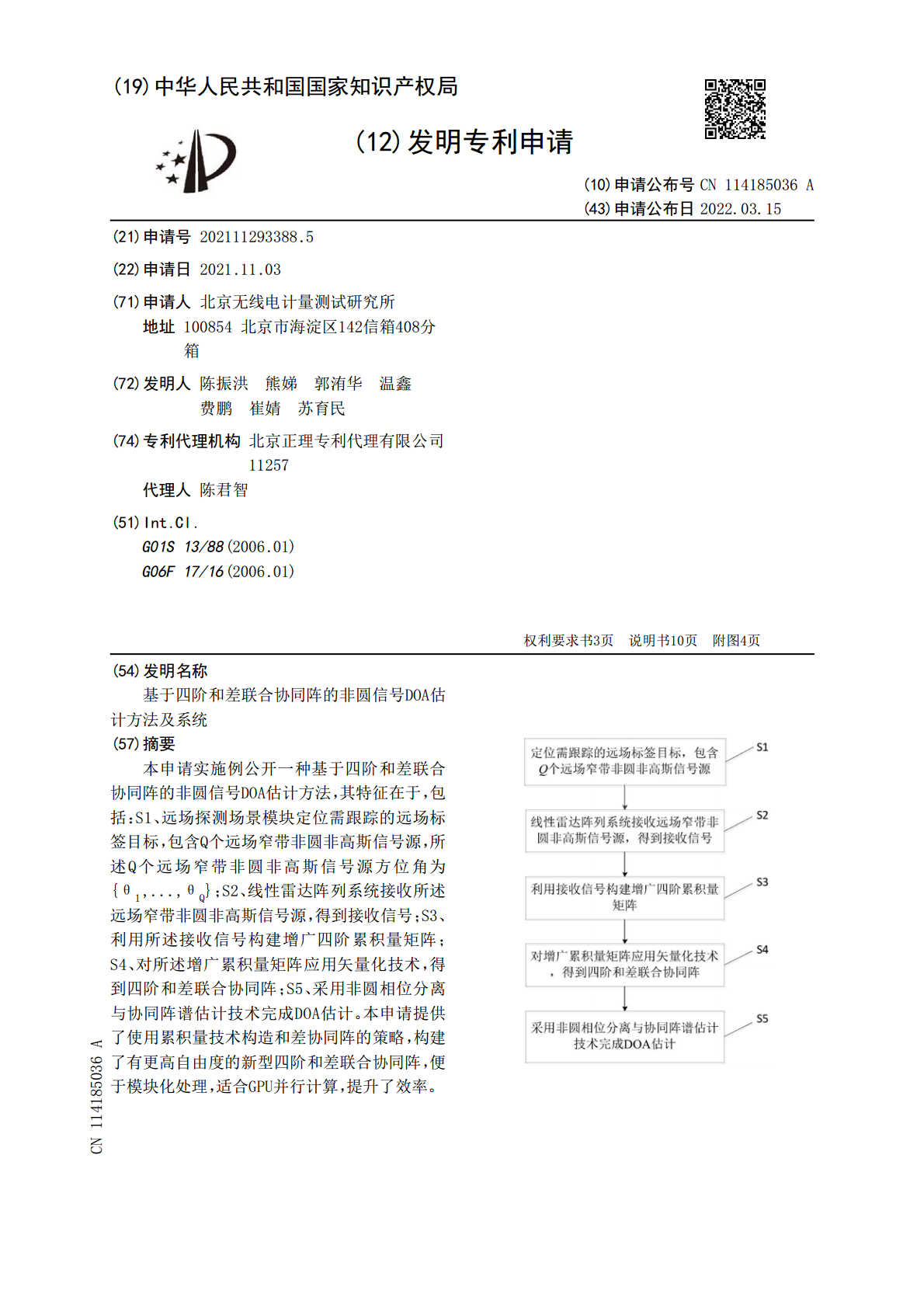
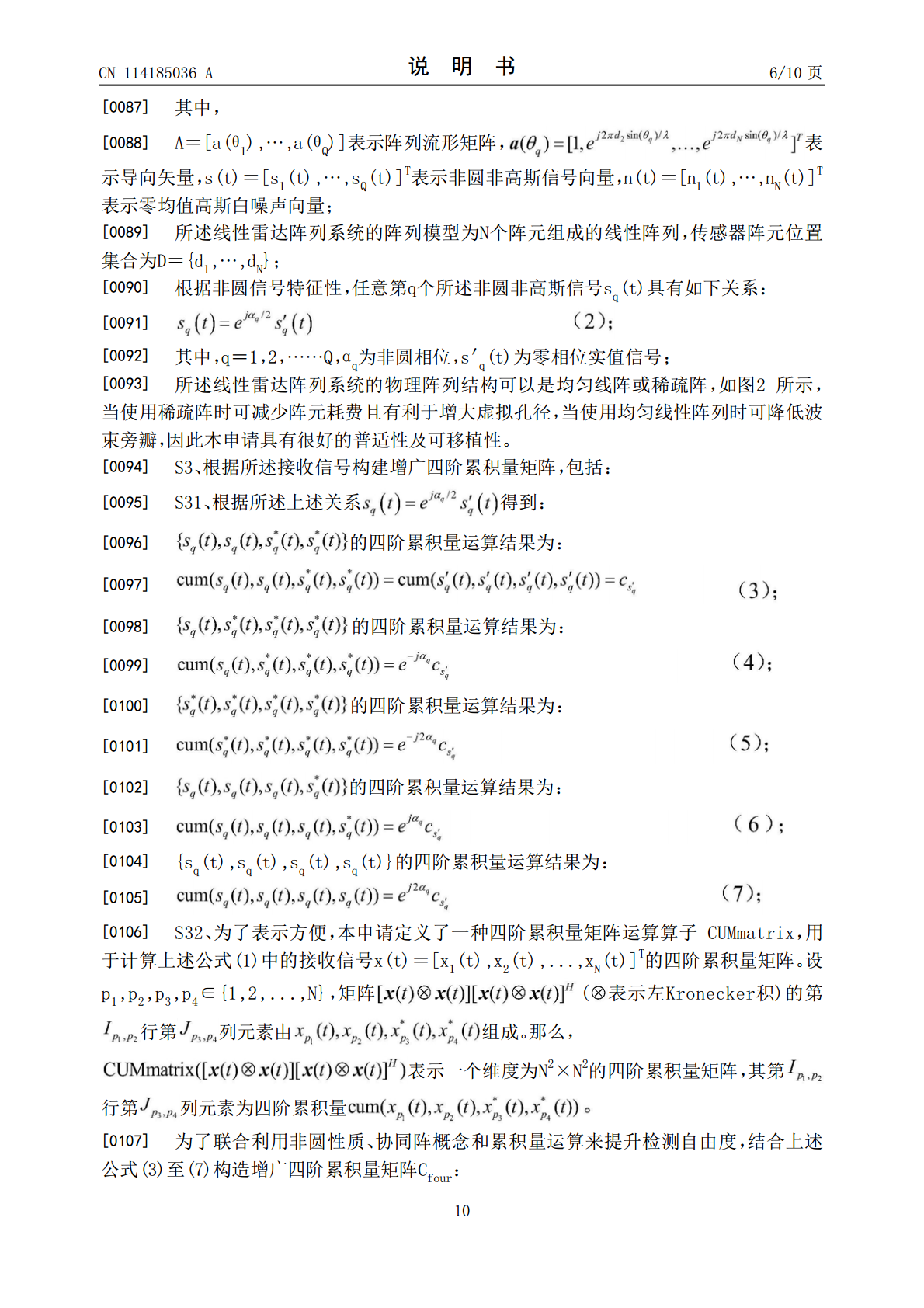
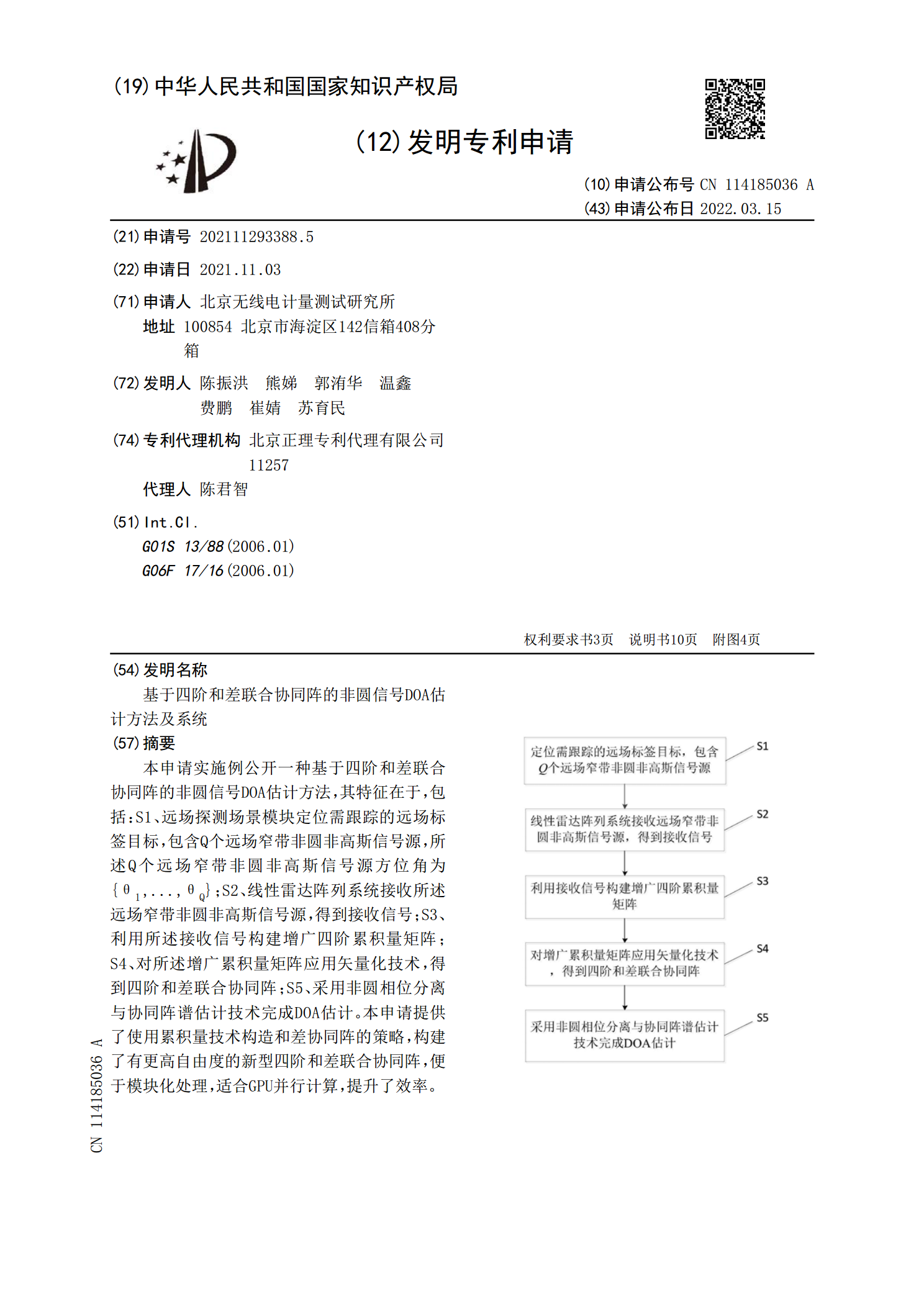
本申请实施例公开一种基于四阶和差联合协同阵的非圆信号DOA估计方法,其特征在于,包括:S1、远场探测场景模块定位需跟踪的远场标签目标,包含Q个远场窄带非圆非高斯信号源,所述Q个远场窄带非圆非高斯信号源方位角为{θ

基于均匀圆阵的循环平稳信号的DOA估计的任务书.docx
基于均匀圆阵的循环平稳信号的DOA估计的任务书一、研究背景在实际的通信、雷达和声波信号处理等领域中,利用阵列信号加权和的方法实现信号的空间分离是一种常见的技术,其中,方位角(DOA)估计是阵列处理中最为重要的问题之一。基于均匀圆阵的循环平稳信号的DOA估计也是其中的一个重要研究方向。均匀圆阵是一种由等间距的传感器组成的阵列形式,具有简单、紧凑、易于对称、结构可靠等优点。循环平稳信号是指信号在时间轴上是平稳的,并具有周期性地变化。这种信号具有较为稳定的统计特性,在DOA估计中十分重要。因此,基于均匀圆阵的循
基于协方差矩阵拟合阵元扩展的DOA估计方法及系统.pdf
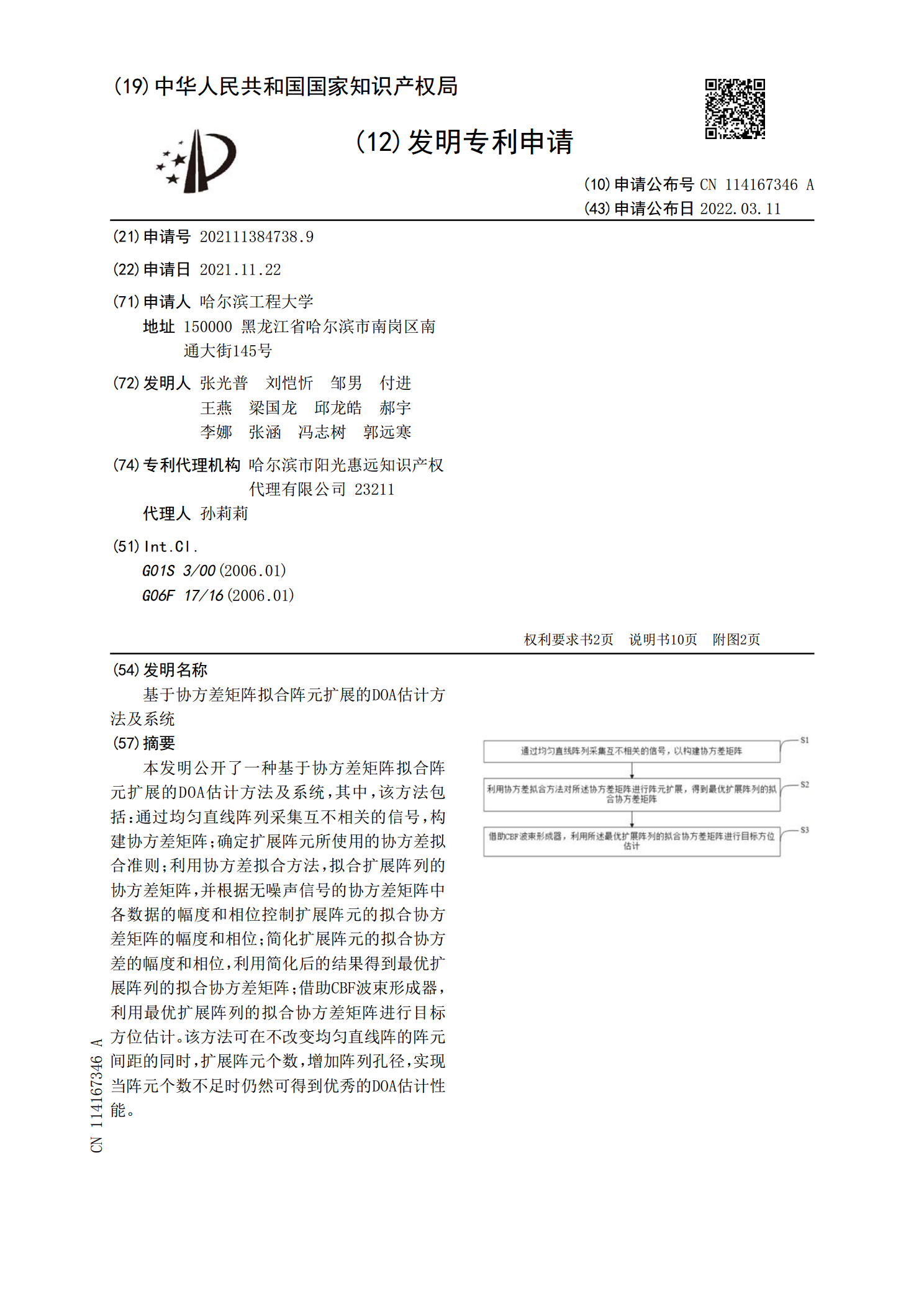
本发明公开了一种基于协方差矩阵拟合阵元扩展的DOA估计方法及系统,其中,该方法包括:通过均匀直线阵列采集互不相关的信号,构建协方差矩阵;确定扩展阵元所使用的协方差拟合准则;利用协方差拟合方法,拟合扩展阵列的协方差矩阵,并根据无噪声信号的协方差矩阵中各数据的幅度和相位控制扩展阵元的拟合协方差矩阵的幅度和相位;简化扩展阵元的拟合协方差的幅度和相位,利用简化后的结果得到最优扩展阵列的拟合协方差矩阵;借助CBF波束形成器,利用最优扩展阵列的拟合协方差矩阵进行目标方位估计。该方法可在不改变均匀直线阵的阵元间距的同时
一种基于Toeplitz矩阵重构和矩阵填充的互质阵相干信号DOA估计方法.pdf
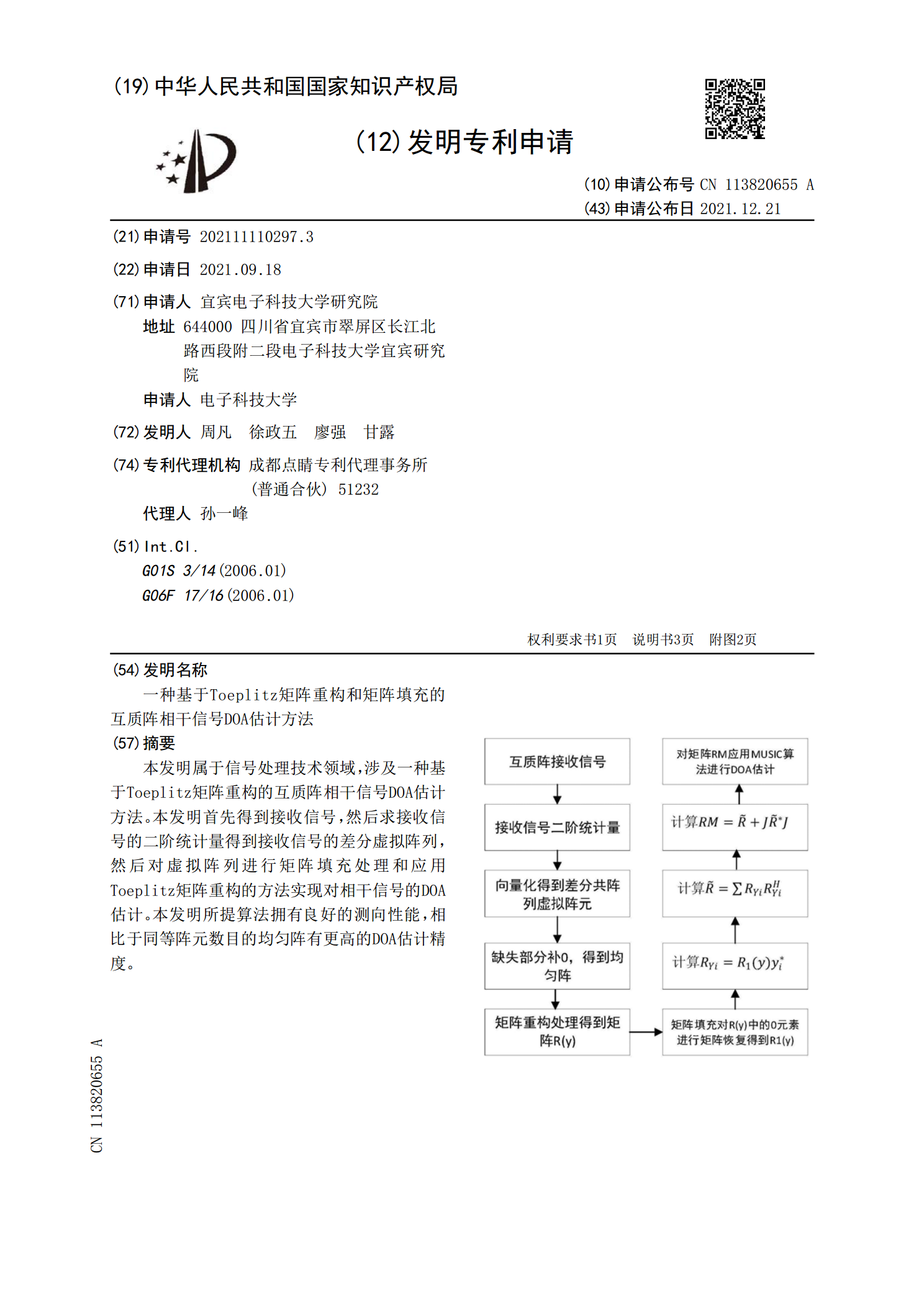
本发明属于信号处理技术领域,涉及一种基于Toeplitz矩阵重构的互质阵相干信号DOA估计方法。本发明首先得到接收信号,然后求接收信号的二阶统计量得到接收信号的差分虚拟阵列,然后对虚拟阵列进行矩阵填充处理和应用Toeplitz矩阵重构的方法实现对相干信号的DOA估计。本发明所提算法拥有良好的测向性能,相比于同等阵元数目的均匀阵有更高的DOA估计精度。
一种基于子空间正交补偿的圆阵DOA估计方法.pdf
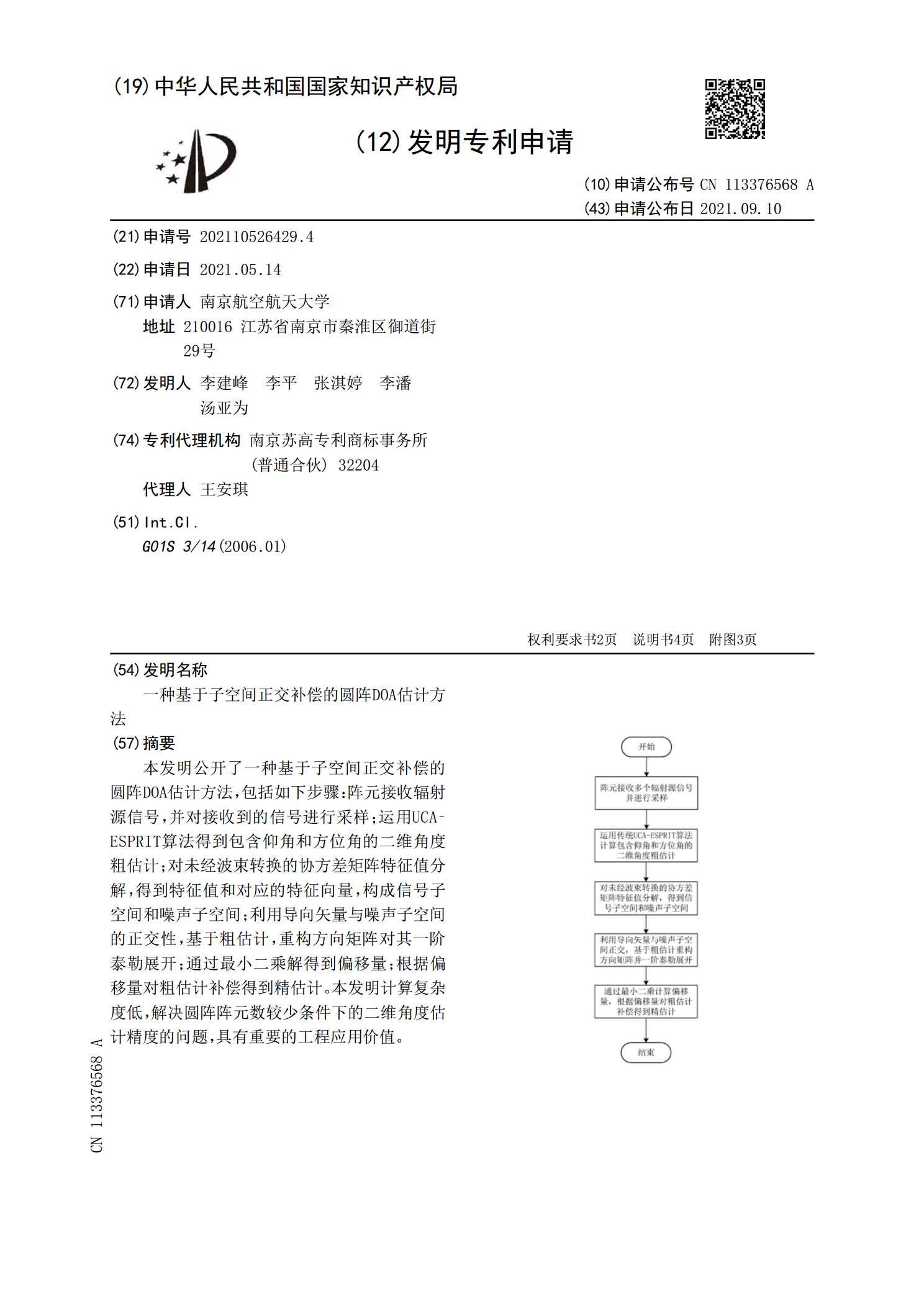
本发明公开了一种基于子空间正交补偿的圆阵DOA估计方法,包括如下步骤:阵元接收辐射源信号,并对接收到的信号进行采样;运用UCA‑ESPRIT算法得到包含仰角和方位角的二维角度粗估计;对未经波束转换的协方差矩阵特征值分解,得到特征值和对应的特征向量,构成信号子空间和噪声子空间;利用导向矢量与噪声子空间的正交性,基于粗估计,重构方向矩阵对其一阶泰勒展开;通过最小二乘解得到偏移量;根据偏移量对粗估计补偿得到精估计。本发明计算复杂度低,解决圆阵阵元数较少条件下的二维角度估计精度的问题,具有重要的工程应用价值。