
一种用于雷达天线测试的载运平台.pdf

书生****66


1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于雷达天线测试的载运平台.pdf
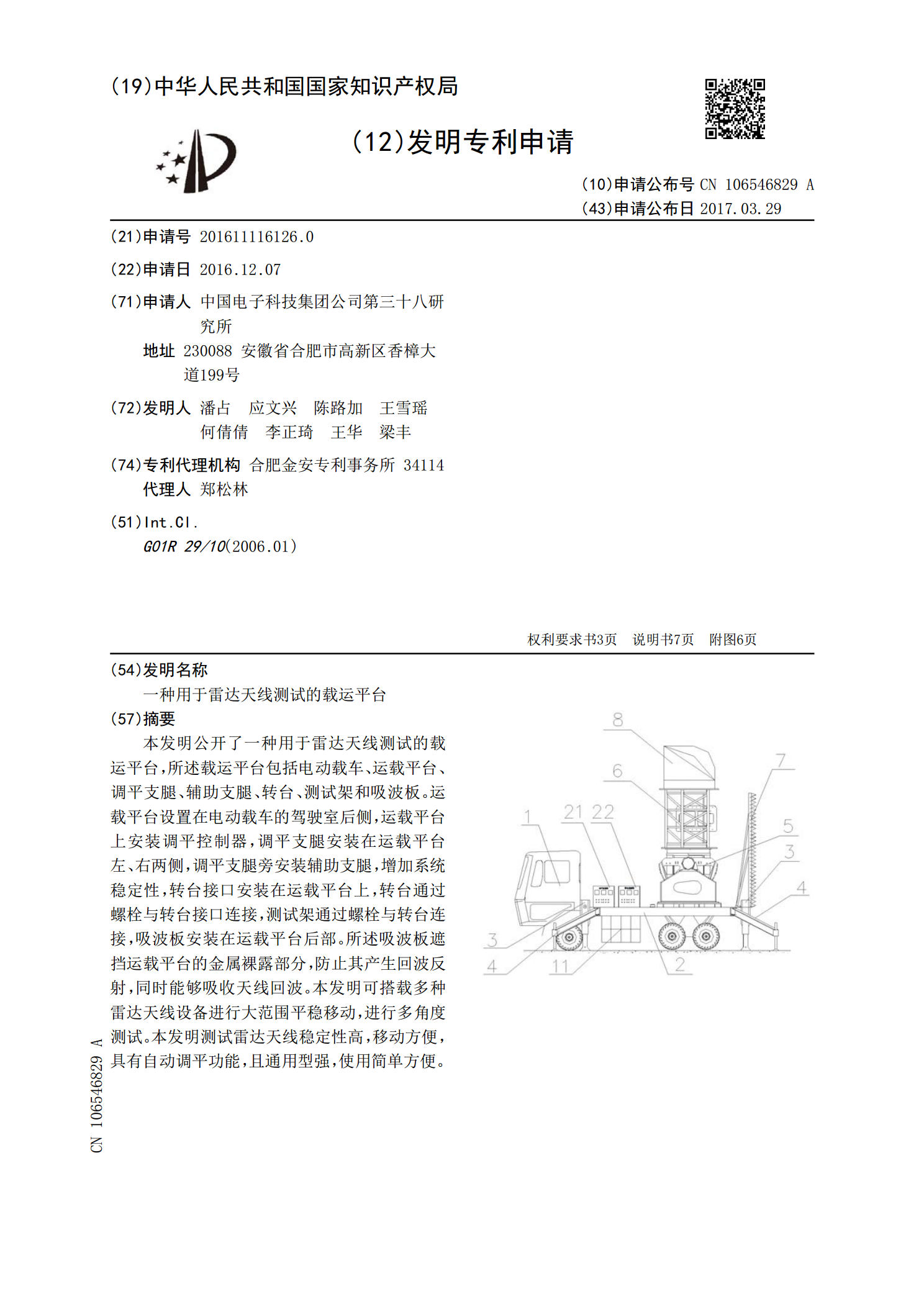
本发明公开了一种用于雷达天线测试的载运平台,所述载运平台包括电动载车、运载平台、调平支腿、辅助支腿、转台、测试架和吸波板。运载平台设置在电动载车的驾驶室后侧,运载平台上安装调平控制器,调平支腿安装在运载平台左、右两侧,调平支腿旁安装辅助支腿,增加系统稳定性,转台接口安装在运载平台上,转台通过螺栓与转台接口连接,测试架通过螺栓与转台连接,吸波板安装在运载平台后部。所述吸波板遮挡运载平台的金属裸露部分,防止其产生回波反射,同时能够吸收天线回波。本发明可搭载多种雷达天线设备进行大范围平稳移动,进行多角度测试。本
用于雷达的天线.pdf
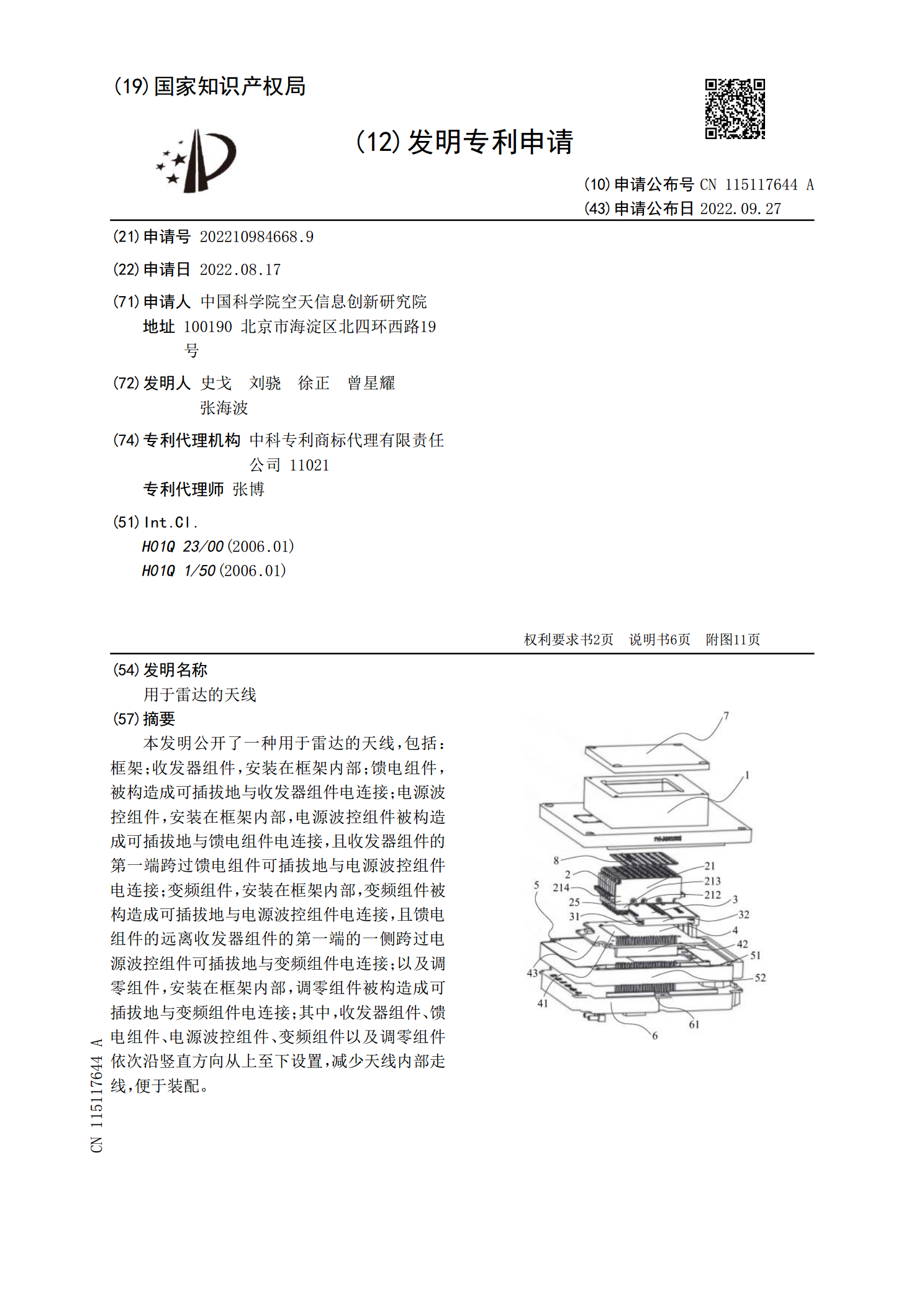
本发明公开了一种用于雷达的天线,包括:框架;收发器组件,安装在框架内部;馈电组件,被构造成可插拔地与收发器组件电连接;电源波控组件,安装在框架内部,电源波控组件被构造成可插拔地与馈电组件电连接,且收发器组件的第一端跨过馈电组件可插拔地与电源波控组件电连接;变频组件,安装在框架内部,变频组件被构造成可插拔地与电源波控组件电连接,且馈电组件的远离收发器组件的第一端的一侧跨过电源波控组件可插拔地与变频组件电连接;以及调零组件,安装在框架内部,调零组件被构造成可插拔地与变频组件电连接;其中,收发器组件、馈电组件、
一种用于空管雷达天线的俯仰机构.pdf
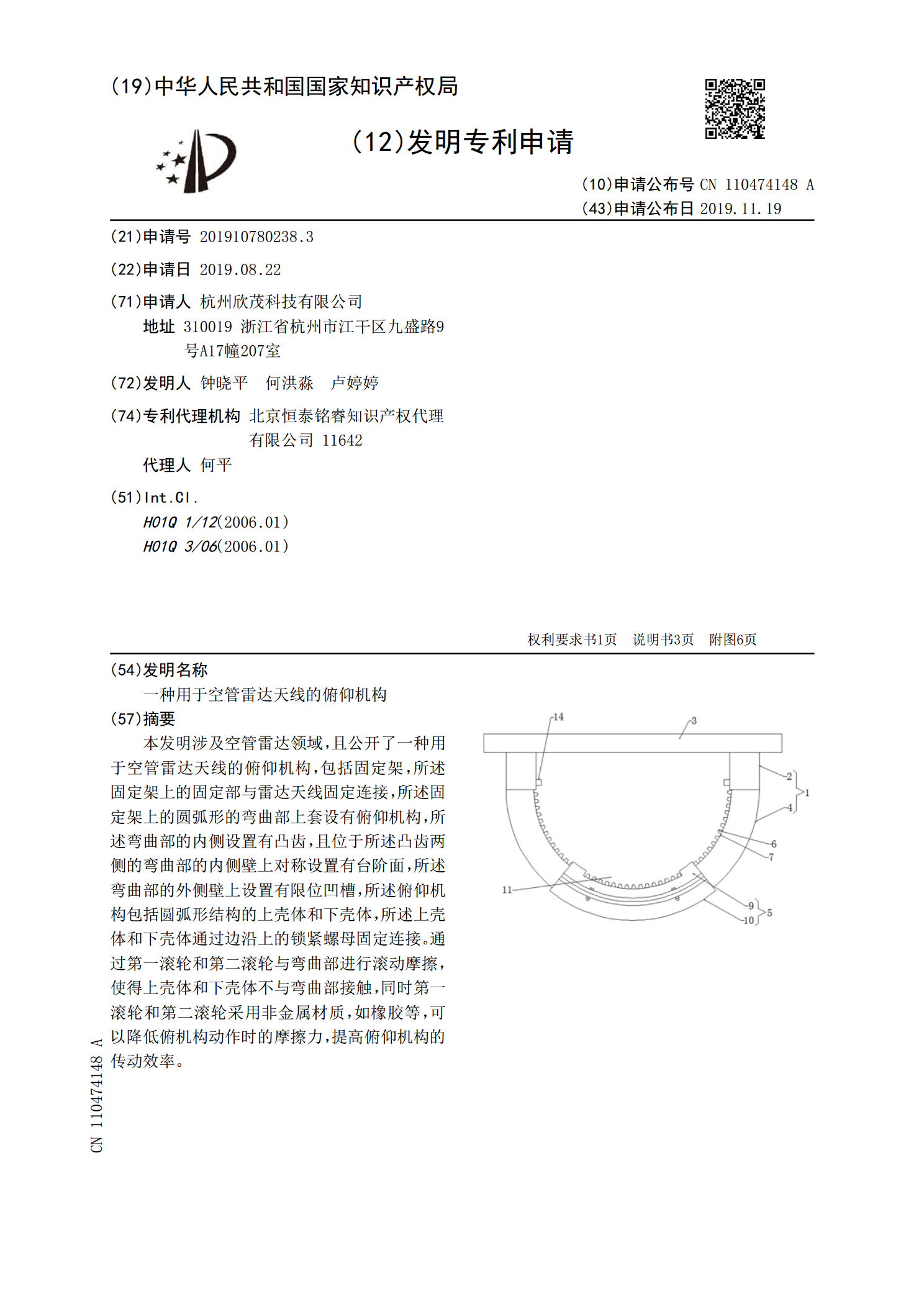
本发明涉及空管雷达领域,且公开了一种用于空管雷达天线的俯仰机构,包括固定架,所述固定架上的固定部与雷达天线固定连接,所述固定架上的圆弧形的弯曲部上套设有俯仰机构,所述弯曲部的内侧设置有凸齿,且位于所述凸齿两侧的弯曲部的内侧壁上对称设置有台阶面,所述弯曲部的外侧壁上设置有限位凹槽,所述俯仰机构包括圆弧形结构的上壳体和下壳体,所述上壳体和下壳体通过边沿上的锁紧螺母固定连接。通过第一滚轮和第二滚轮与弯曲部进行滚动摩擦,使得上壳体和下壳体不与弯曲部接触,同时第一滚轮和第二滚轮采用非金属材质,如橡胶等,可以降低俯机
雷达天线机构以及用于屏蔽雷达天线机构的方法.pdf
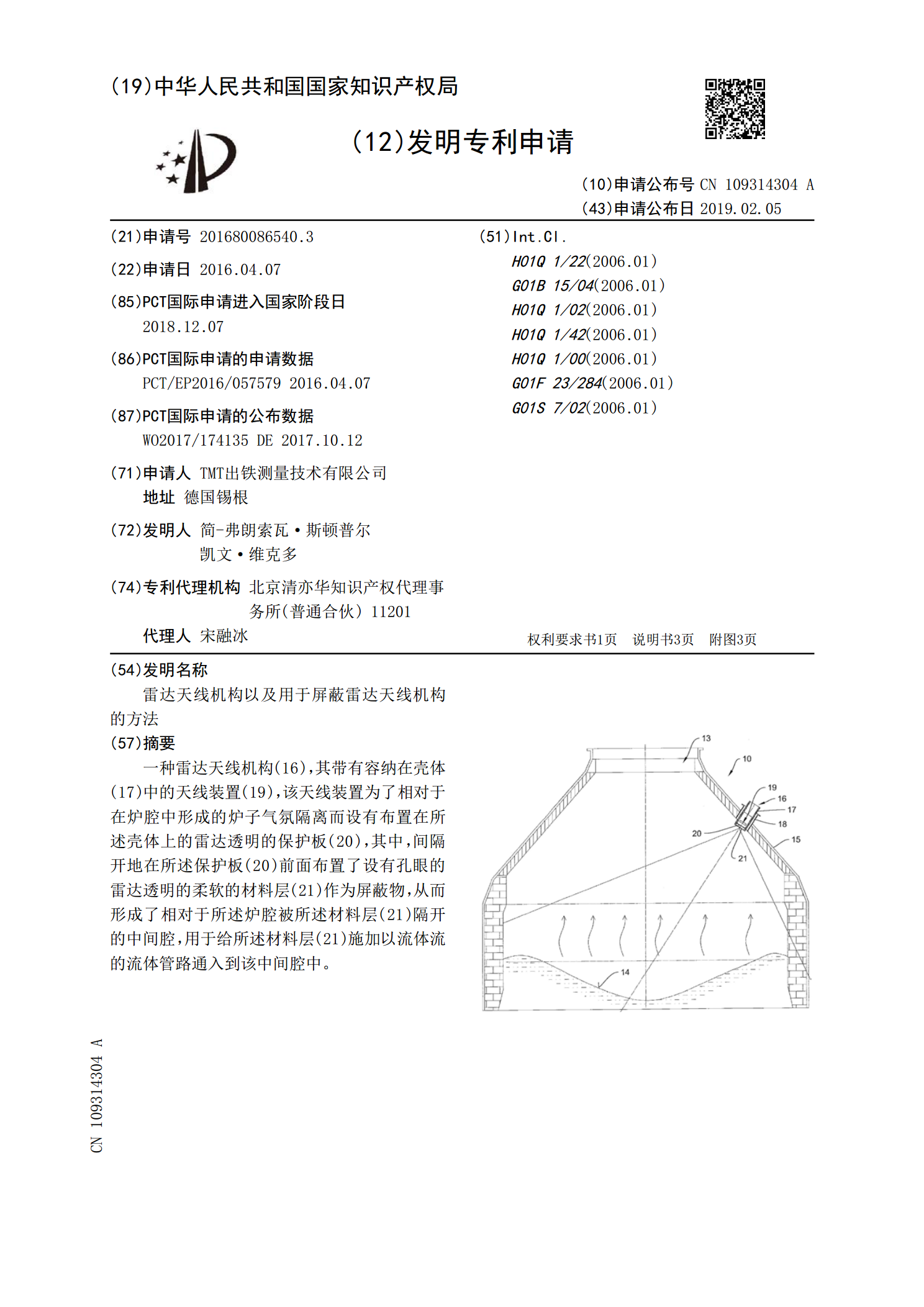
一种雷达天线机构(16),其带有容纳在壳体(17)中的天线装置(19),该天线装置为了相对于在炉腔中形成的炉子气氛隔离而设有布置在所述壳体上的雷达透明的保护板(20),其中,间隔开地在所述保护板(20)前面布置了设有孔眼的雷达透明的柔软的材料层(21)作为屏蔽物,从而形成了相对于所述炉腔被所述材料层(21)隔开的中间腔,用于给所述材料层(21)施加以流体流的流体管路通入到该中间腔中。
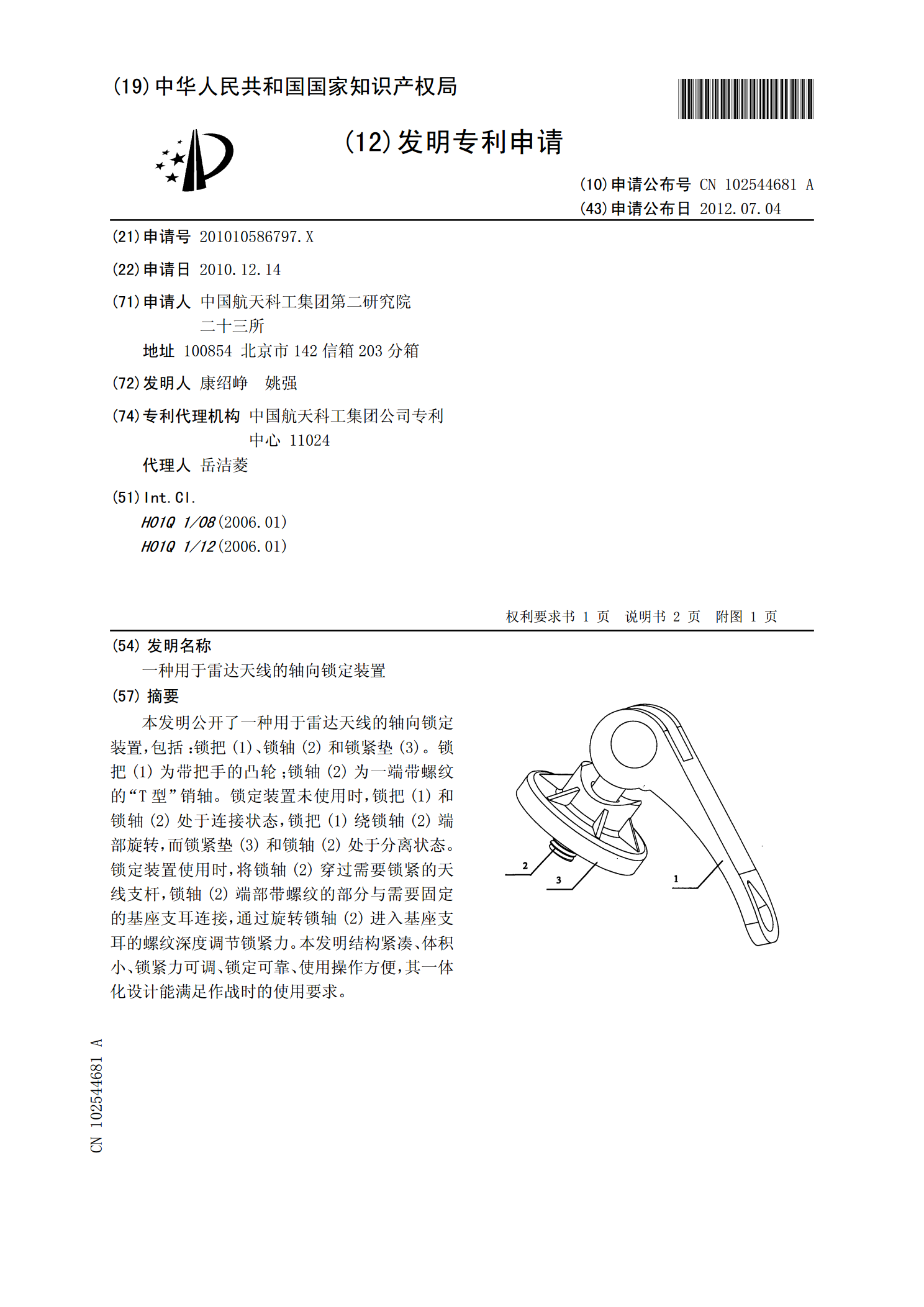
一种用于雷达天线的轴向锁定装置.pdf
本发明公开了一种用于雷达天线的轴向锁定装置,包括:锁把(1)、锁轴(2)和锁紧垫(3)。锁把(1)为带把手的凸轮;锁轴(2)为一端带螺纹的“T型”销轴。锁定装置未使用时,锁把(1)和锁轴(2)处于连接状态,锁把(1)绕锁轴(2)端部旋转,而锁紧垫(3)和锁轴(2)处于分离状态。锁定装置使用时,将锁轴(2)穿过需要锁紧的天线支杆,锁轴(2)端部带螺纹的部分与需要固定的基座支耳连接,通过旋转锁轴(2)进入基座支耳的螺纹深度调节锁紧力。本发明结构紧凑、体积小、锁紧力可调、锁定可靠、使用操作方便,其一体化设计能满