
一种臂架系统控制方法、臂架控制系统及臂架设备.pdf

文库****坚白

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种臂架系统控制方法、臂架控制系统及臂架设备.pdf
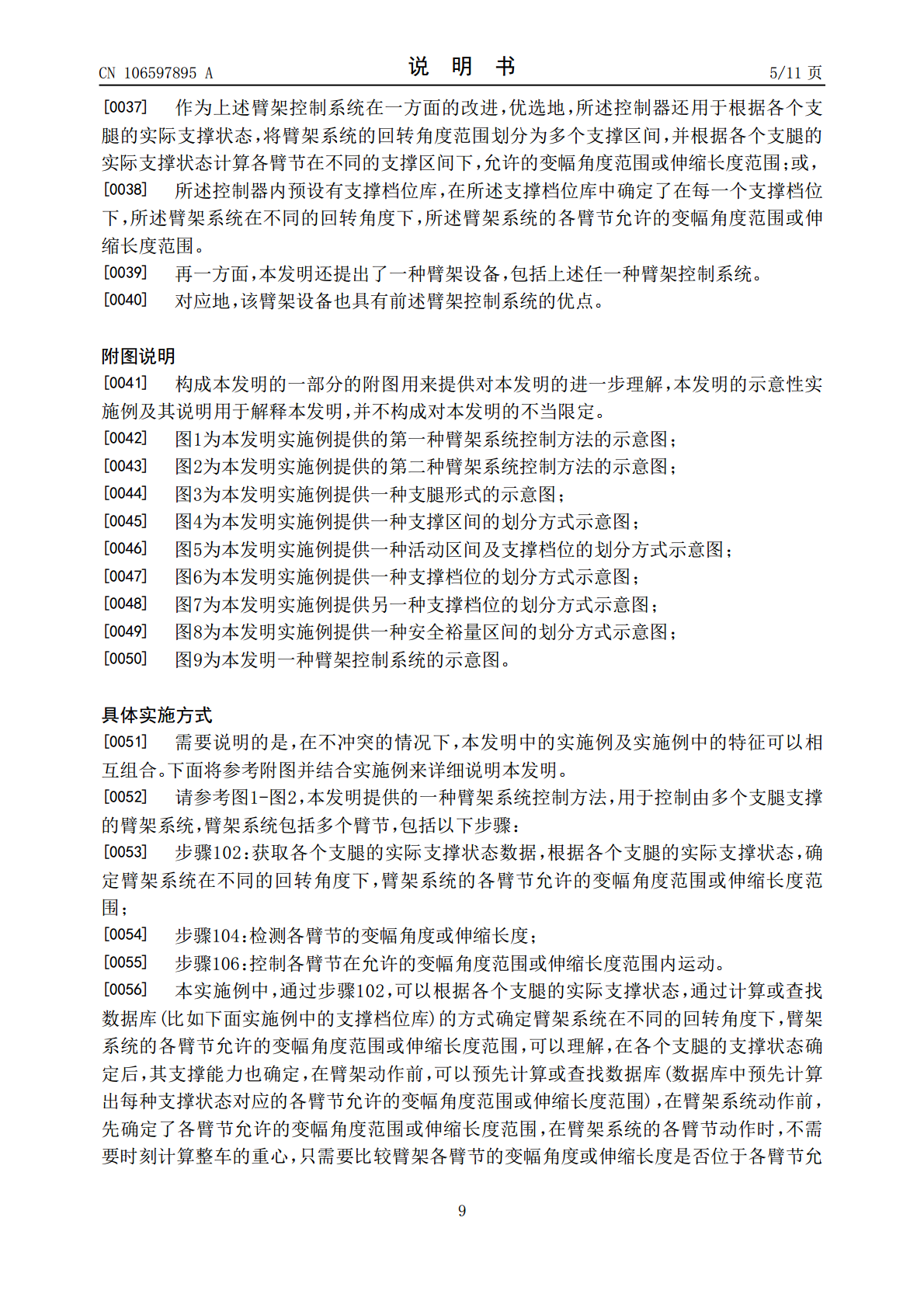
本发明提出了一种臂架系统控制方法、臂架控制系统及臂架设备,该臂架系统控制方法包括以下步骤:获取各个支腿的实际支撑状态数据,根据各个支腿的实际支撑状态,确定臂架系统在不同的回转角度下,臂架系统的各臂节允许的变幅角度范围或伸缩长度范围;检测各臂节的变幅角度或伸缩长度;控制各臂节在允许的变幅角度范围或伸缩长度范围内运动。该方法在臂架系统动作前,先确定了各臂节允许的变幅角度范围或伸缩长度范围,在臂架系统的各臂节动作时,不需要时刻计算整车的重心,只需要比较臂架各臂节的变幅角度或伸缩长度是否位于各臂节允许的变幅角度范
一种臂架系统控制方法、臂架控制系统及臂架设备.pdf
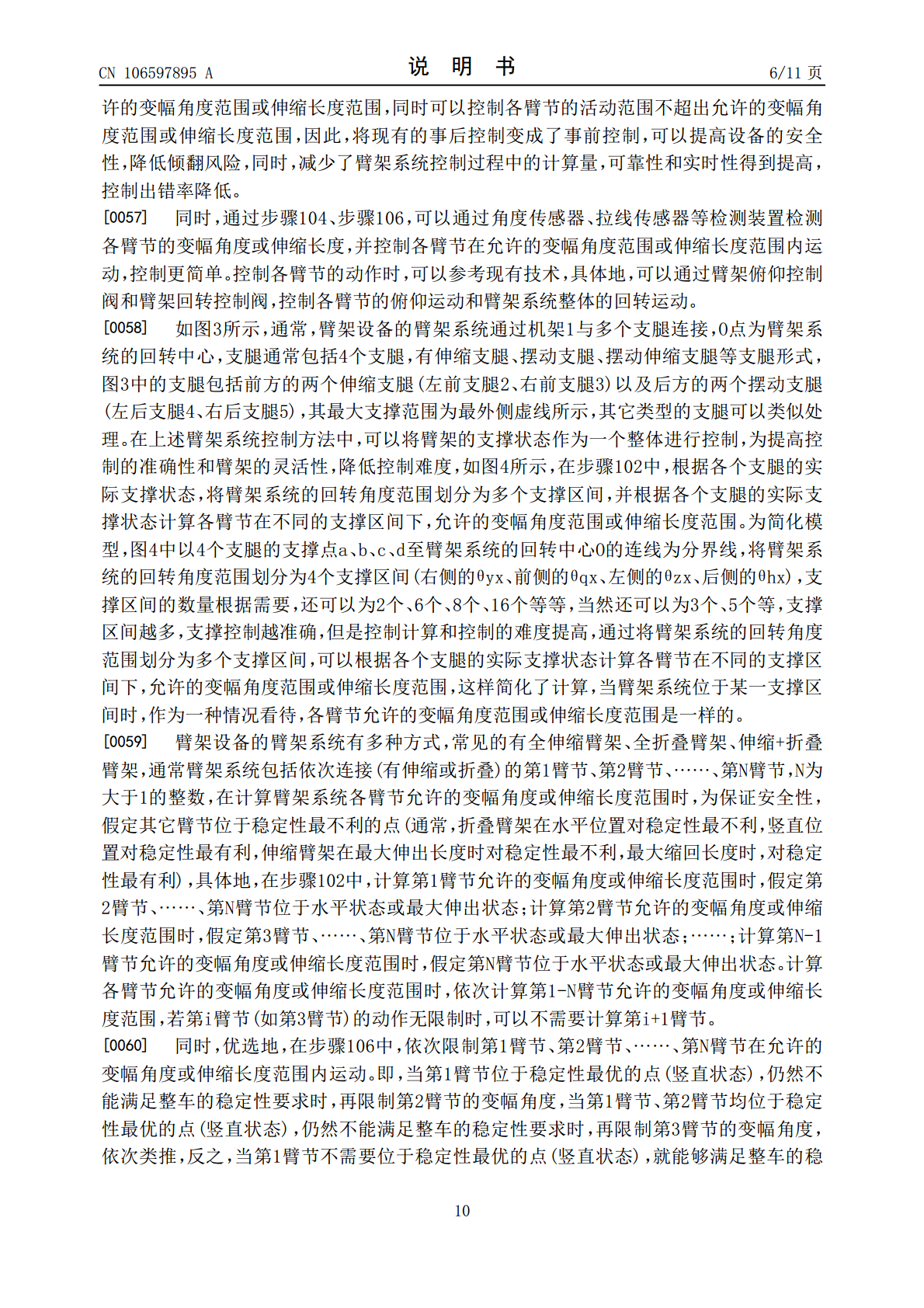
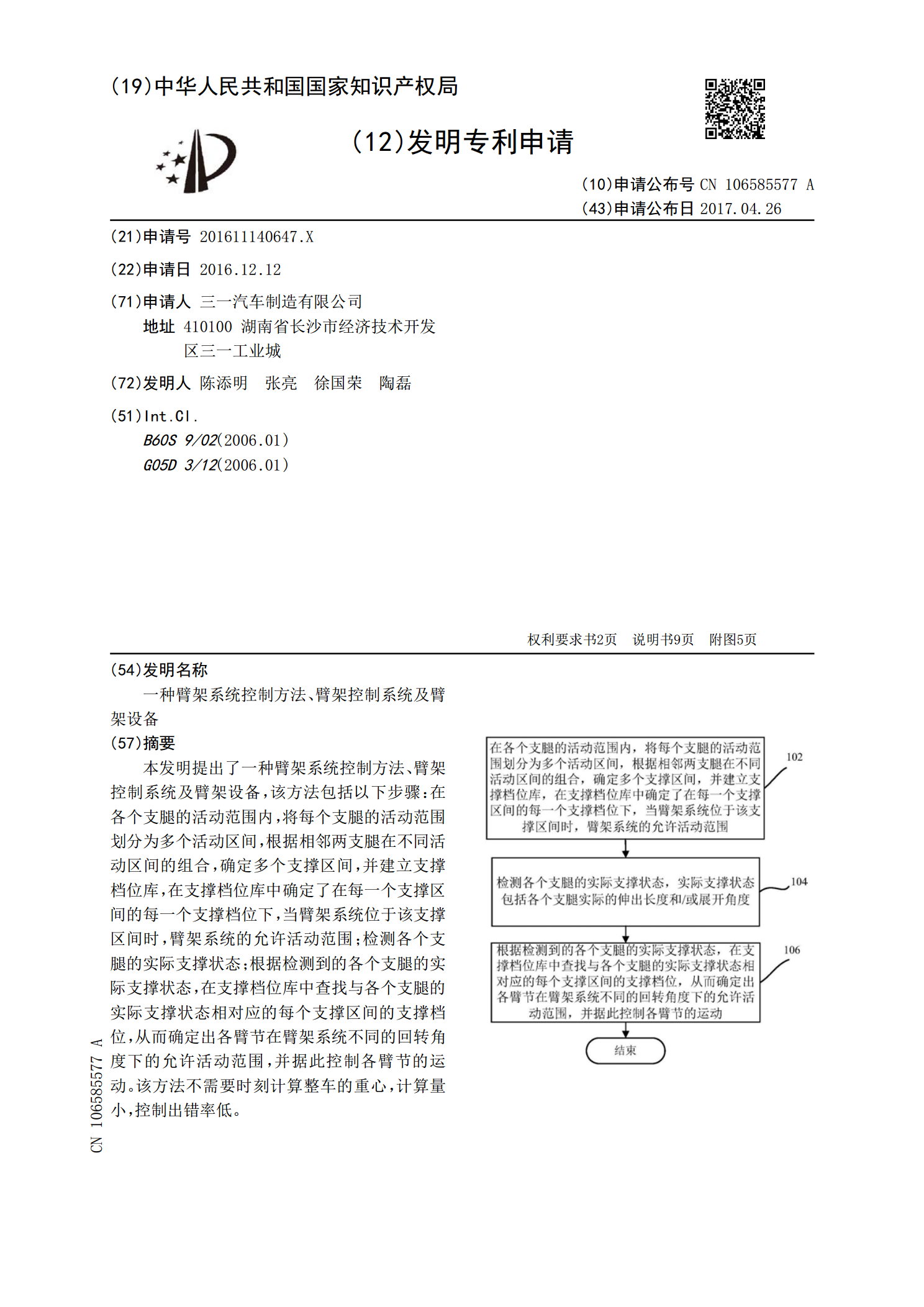
本发明提出了一种臂架系统控制方法、臂架控制系统及臂架设备,该方法包括以下步骤:在各个支腿的活动范围内,将每个支腿的活动范围划分为多个活动区间,根据各个支腿在不同活动区间的组合,建立支撑档位库,在支撑档位库中确定了在每一个支撑档位下,臂架系统在不同的回转角度下,臂架系统的允许活动范围;检测各个支腿的实际支撑状态,实际支撑状态包括各个支腿实际的伸出长度和/或展开角度;根据检测到的各个支腿的实际支撑状态,在支撑档位库中查找与各个支腿的实际支撑状态相对应的支撑档位,从而确定出臂架系统在不同的回转角度下的允许活动范
一种臂架系统控制方法、臂架控制系统及臂架设备.pdf
本发明提出了一种臂架系统控制方法、臂架控制系统及臂架设备,该方法包括以下步骤:在各个支腿的活动范围内,将每个支腿的活动范围划分为多个活动区间,根据相邻两支腿在不同活动区间的组合,确定多个支撑区间,并建立支撑档位库,在支撑档位库中确定了在每一个支撑区间的每一个支撑档位下,当臂架系统位于该支撑区间时,臂架系统的允许活动范围;检测各个支腿的实际支撑状态;根据检测到的各个支腿的实际支撑状态,在支撑档位库中查找与各个支腿的实际支撑状态相对应的每个支撑区间的支撑档位,从而确定出各臂节在臂架系统不同的回转角度下的允许活
连接臂架及设有该连接臂架的臂架系统和工程设备.pdf
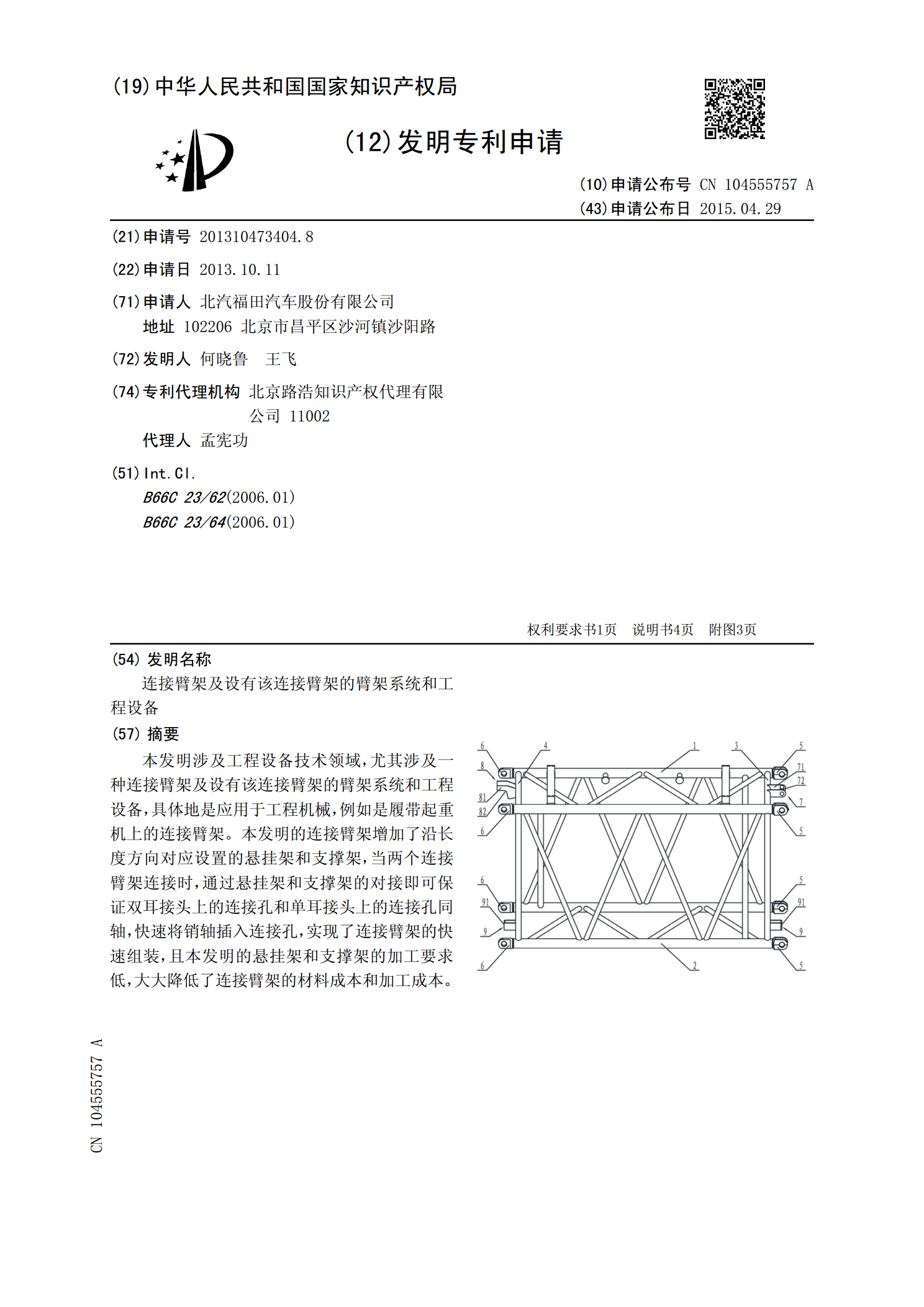
本发明涉及工程设备技术领域,尤其涉及一种连接臂架及设有该连接臂架的臂架系统和工程设备,具体地是应用于工程机械,例如是履带起重机上的连接臂架。本发明的连接臂架增加了沿长度方向对应设置的悬挂架和支撑架,当两个连接臂架连接时,通过悬挂架和支撑架的对接即可保证双耳接头上的连接孔和单耳接头上的连接孔同轴,快速将销轴插入连接孔,实现了连接臂架的快速组装,且本发明的悬挂架和支撑架的加工要求低,大大降低了连接臂架的材料成本和加工成本。
臂架.pdf
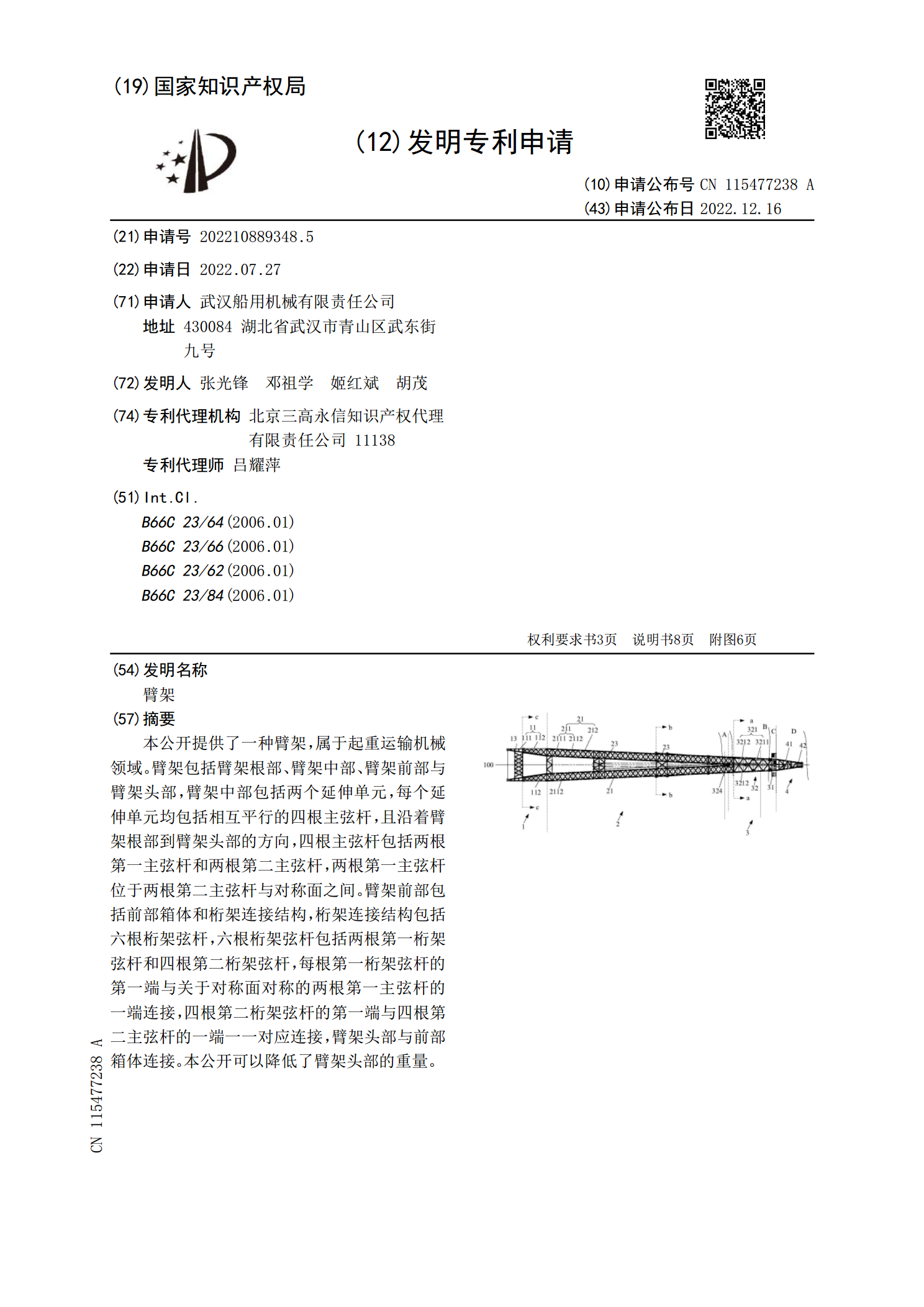
本公开提供了一种臂架,属于起重运输机械领域。臂架包括臂架根部、臂架中部、臂架前部与臂架头部,臂架中部包括两个延伸单元,每个延伸单元均包括相互平行的四根主弦杆,且沿着臂架根部到臂架头部的方向,四根主弦杆包括两根第一主弦杆和两根第二主弦杆,两根第一主弦杆位于两根第二主弦杆与对称面之间。臂架前部包括前部箱体和桁架连接结构,桁架连接结构包括六根桁架弦杆,六根桁架弦杆包括两根第一桁架弦杆和四根第二桁架弦杆,每根第一桁架弦杆的第一端与关于对称面对称的两根第一主弦杆的一端连接,四根第二桁架弦杆的第一端与四根第二主弦杆的