
一种负压吸附式自攀爬幕墙清洗机器人.pdf

是你****噩呀


1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种负压吸附式自攀爬幕墙清洗机器人.pdf
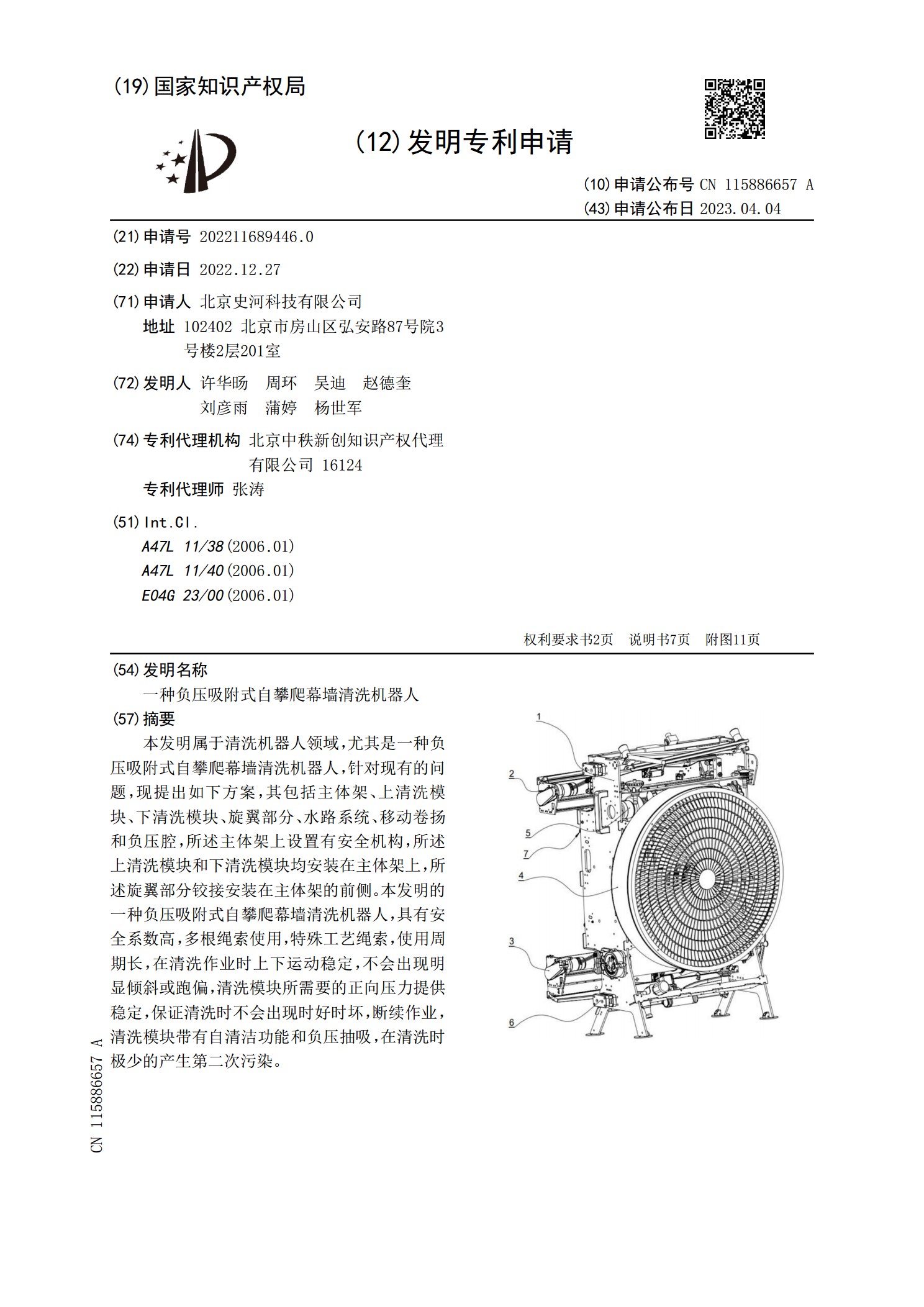
本发明属于清洗机器人领域,尤其是一种负压吸附式自攀爬幕墙清洗机器人,针对现有的问题,现提出如下方案,其包括主体架、上清洗模块、下清洗模块、旋翼部分、水路系统、移动卷扬和负压腔,所述主体架上设置有安全机构,所述上清洗模块和下清洗模块均安装在主体架上,所述旋翼部分铰接安装在主体架的前侧。本发明的一种负压吸附式自攀爬幕墙清洗机器人,具有安全系数高,多根绳索使用,特殊工艺绳索,使用周期长,在清洗作业时上下运动稳定,不会出现明显倾斜或跑偏,清洗模块所需要的正向压力提供稳定,保证清洗时不会出现时好时坏,断续作业,清洗
一种用于检测桥梁裂缝的负压吸附攀爬式机器人.pdf
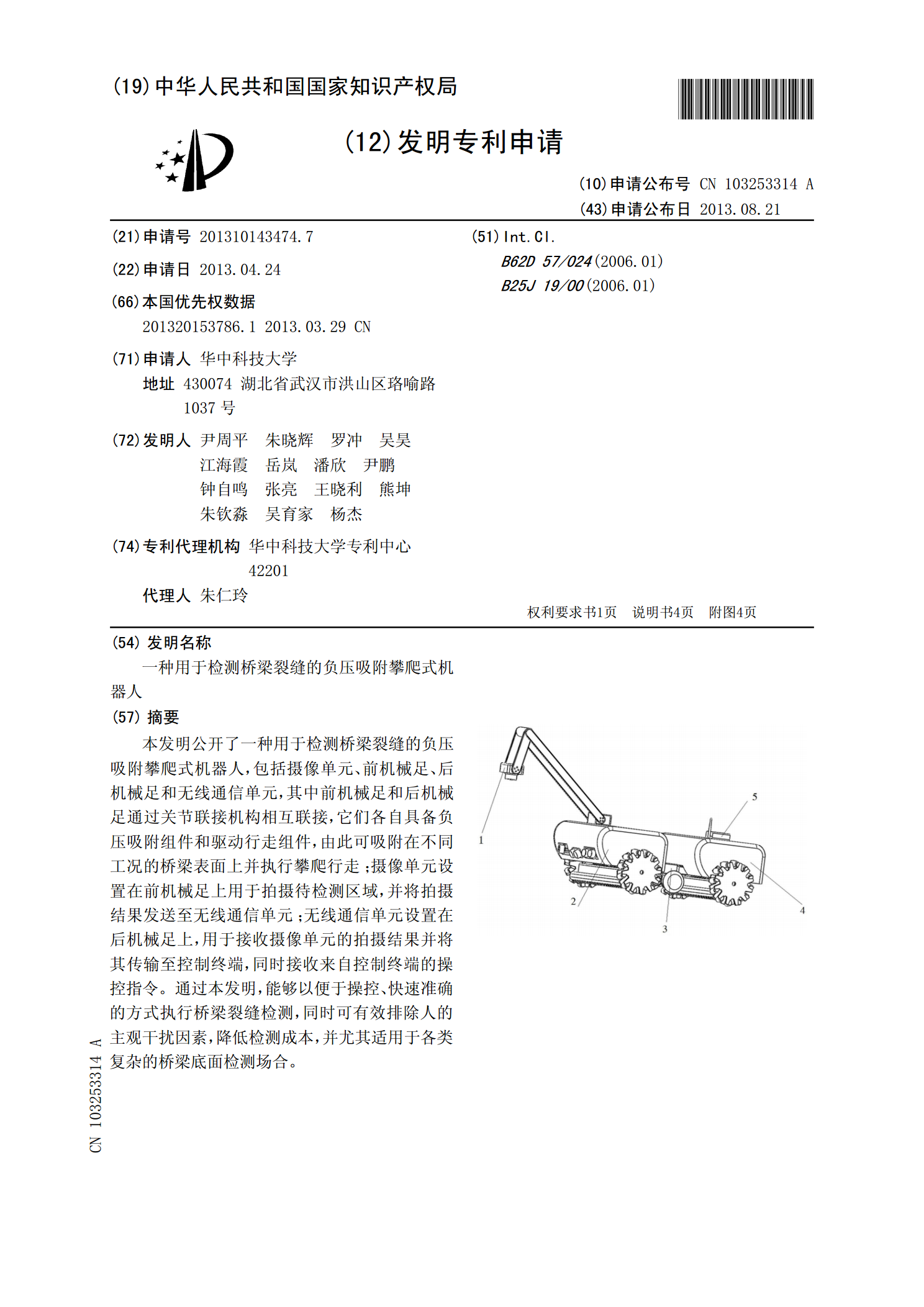
本发明公开了一种用于检测桥梁裂缝的负压吸附攀爬式机器人,包括摄像单元、前机械足、后机械足和无线通信单元,其中前机械足和后机械足通过关节联接机构相互联接,它们各自具备负压吸附组件和驱动行走组件,由此可吸附在不同工况的桥梁表面上并执行攀爬行走;摄像单元设置在前机械足上用于拍摄待检测区域,并将拍摄结果发送至无线通信单元;无线通信单元设置在后机械足上,用于接收摄像单元的拍摄结果并将其传输至控制终端,同时接收来自控制终端的操控指令。通过本发明,能够以便于操控、快速准确的方式执行桥梁裂缝检测,同时可有效排除人的主观干

一种浮力式负压吸附清洗器.pdf
本发明提供一种浮力式负压吸附清洗器,包括框架,所述框架上设置有轮子、把手和清洗器,所述清洗器包括旋转密封接口结构、清洗旋转结构、反冲水管和整流罩,所述旋转密封接口结构连接清洗器的进水口,水流经进水口进入旋转密封接口结构后同时进入到反冲水管和清洗旋转结构内,所述清洗旋转结构设置在整流罩内,清洗旋转结构包括中心轴及安装在中心轴上的旋转清洗头,水流经中心轴进入旋转清洗头后由旋转清洗头两端的喷嘴排出。本清洗器利用空化射流进行水下清洗,采用较低水压不对操作人员造成威胁同时不会伤害原有涂层,在水下使用时操作方便、作业
一种攀爬式幕墙清洗机器人.pdf
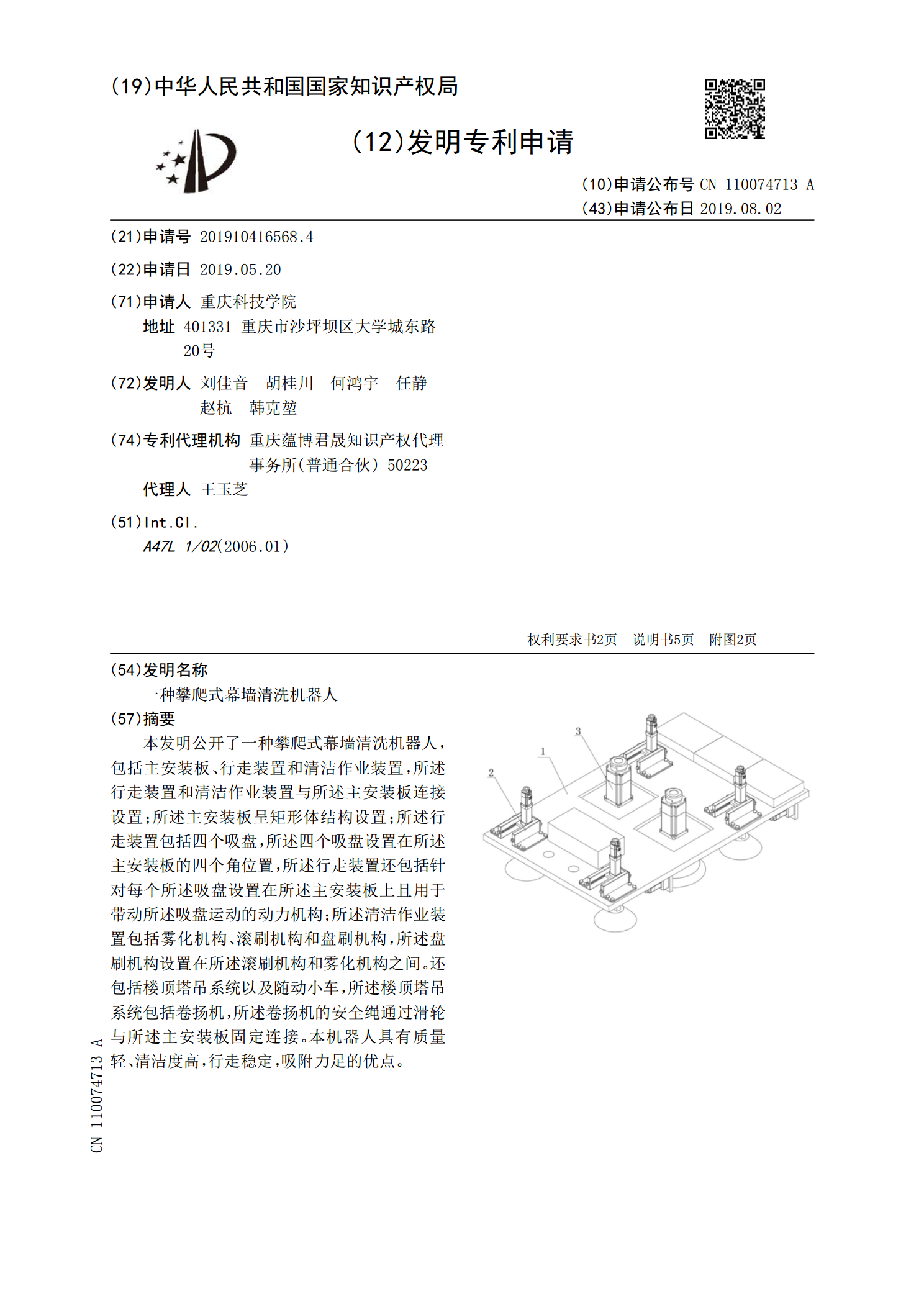
本发明公开了一种攀爬式幕墙清洗机器人,包括主安装板、行走装置和清洁作业装置,所述行走装置和清洁作业装置与所述主安装板连接设置;所述主安装板呈矩形体结构设置;所述行走装置包括四个吸盘,所述四个吸盘设置在所述主安装板的四个角位置,所述行走装置还包括针对每个所述吸盘设置在所述主安装板上且用于带动所述吸盘运动的动力机构;所述清洁作业装置包括雾化机构、滚刷机构和盘刷机构,所述盘刷机构设置在所述滚刷机构和雾化机构之间。还包括楼顶塔吊系统以及随动小车,所述楼顶塔吊系统包括卷扬机,所述卷扬机的安全绳通过滑轮与所述主安装板

一种负压吸附式爬壁机器人.pdf
本发明公开了一种负压吸附式爬壁机器人,包括负压发生装置、控制装置、支撑及密封装置和移动装置;机器人质心同后轮之间的距离与前后行走车轮跨距的比值范围为小于等于三分之一。机器人的负压发生装置中的叶轮和泵体之间采用两道字形迷宫式间隙密封。机器人的底板边缘的密封带固连在底板上,密封带内部填充海绵。机器人的底板边缘的密封带固连在底板上,密封带内部填充海绵。该密封带通过安装压条固定在底板上或者胶粘在底板上。密封带呈无缝整体结构,材料为防雨绸,机器人的底板上设置若干通气孔。本发明的机器人结构简单、小型高效、具有自助实现