
一种电梯导轨自动定位装置.pdf

书生****专家

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电梯导轨自动定位装置.pdf
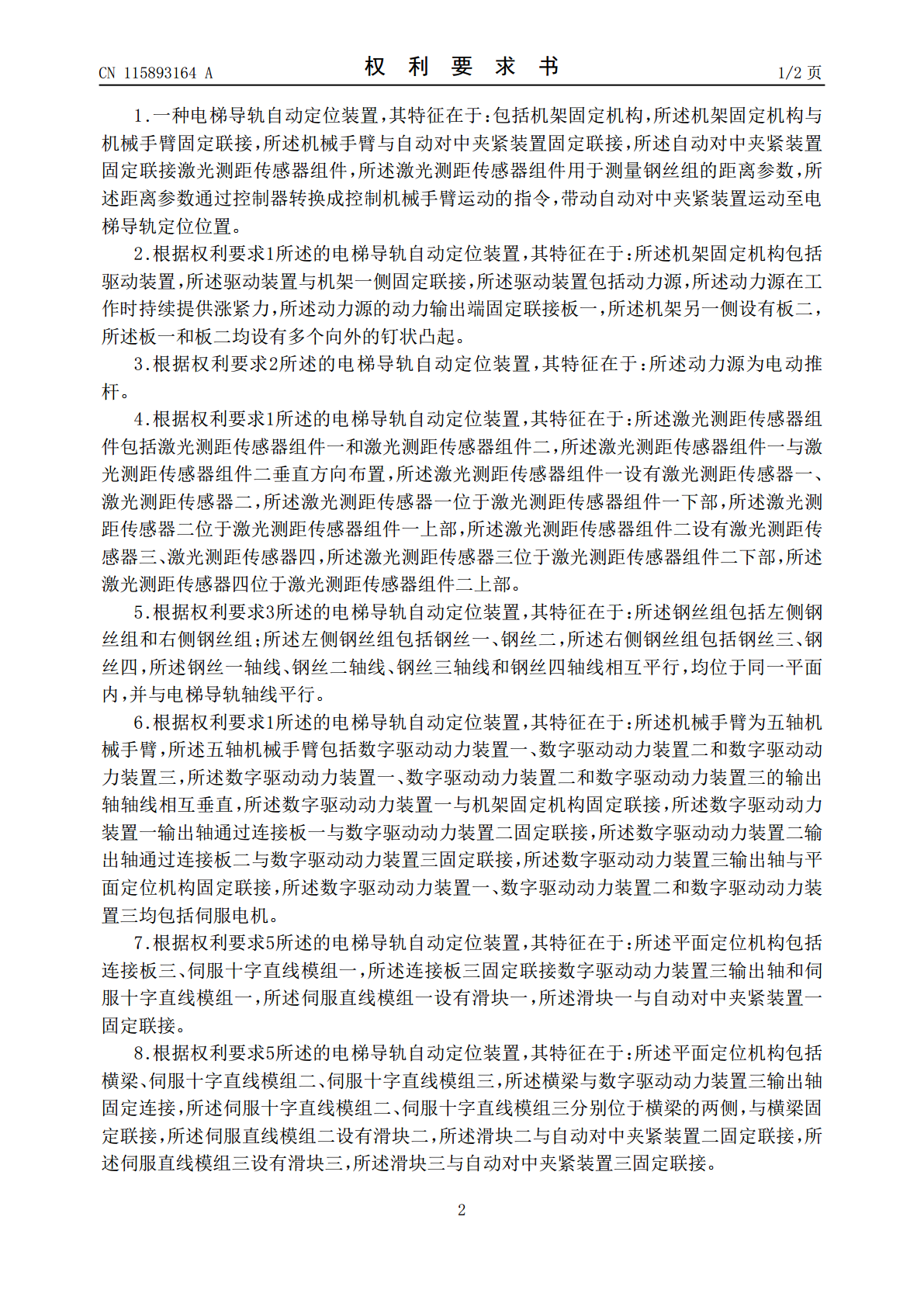
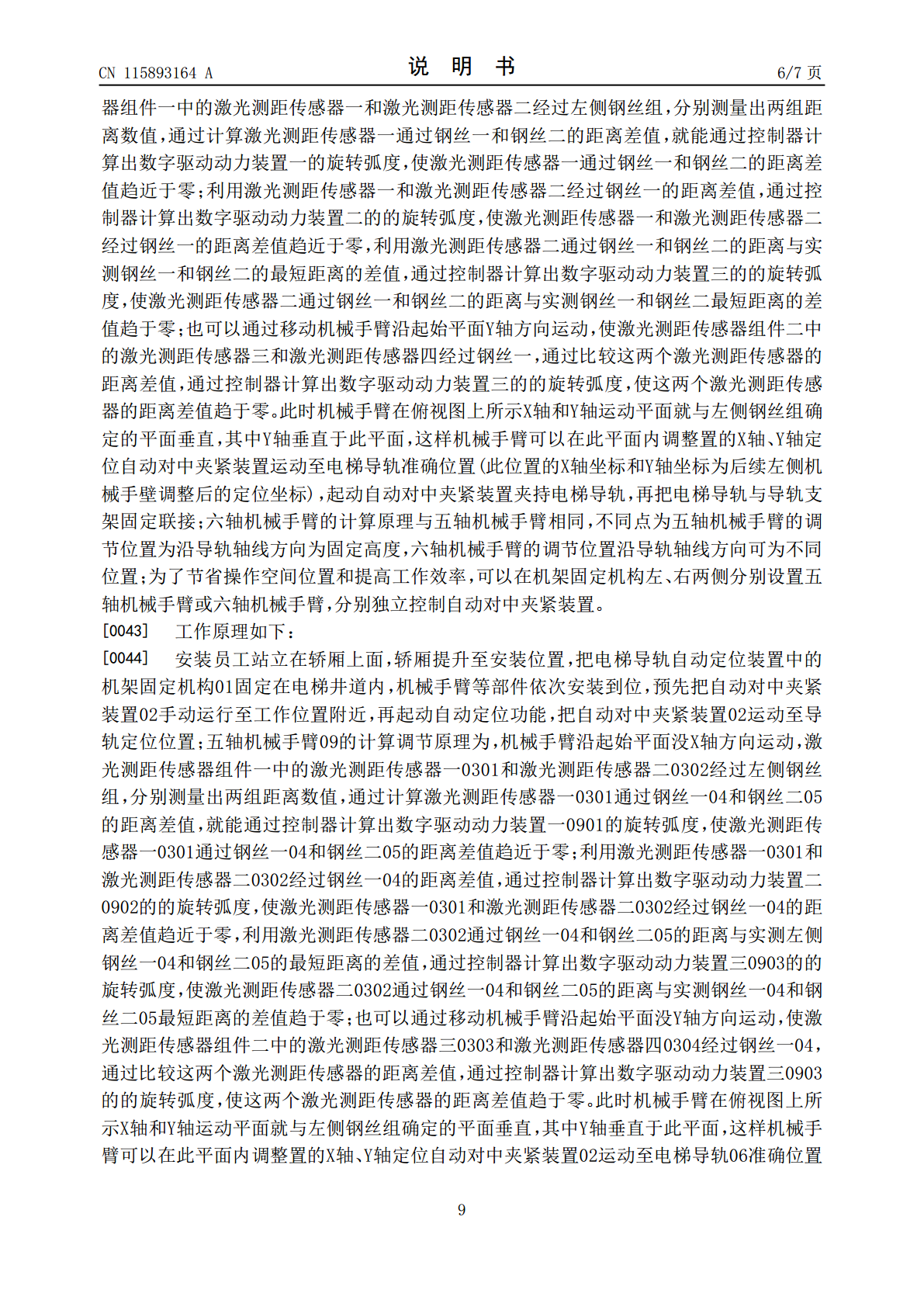
本发明一种电梯导轨自动定位装置,所述机架固定机构与机械手臂固定联接,所述机械手臂与自动对中夹紧装置固定联接,所述自动对中夹紧装置固定联接激光测距传感器组件,所述激光测距传感器组件用于测量钢丝组的距离参数,所述距离参数通过控制器转换成控制机械手臂运动的指令;所述钢丝组包括左侧钢丝组和右侧钢丝组;应用控制器精确控制机械手臂驱动自动对中夹紧装置,使电梯导轨精准定位,再与导轨支架固定联接,这样可大大减轻电梯导轨安装人员的工作强度,使电梯导轨的安装精度得到有效保证。

一种电梯导轨自动清洁装置.pdf
本发明涉及的一种电梯导轨自动清洁装置,属于电梯技术领域。它包括设置在电梯导轨上的固定座和连接在固定座上的清洁装置,所述清洁装置具有用于刮掉导轨中残留油污的软质刮片,所述软质刮片下方设置有清少细小杂物的毛刷,所述毛刷下方还设有用于吸取毛刷刷下的细小杂物的吸尘装置,所述清洁装置还具有用于收集油污和细小杂物的收集盒,所述吸尘装置包括设置在毛刷下部的吸尘口和设置在收集盒内的吸尘泵。本发明的有益之处是:多次清洁,可以有效的清除电梯导轨中的油污和其它杂物,降低电梯运行时导靴与导轨的摩擦力,进而提高导靴的使用寿命,提高
一种沿电梯导轨自动移动车辆的装置.pdf
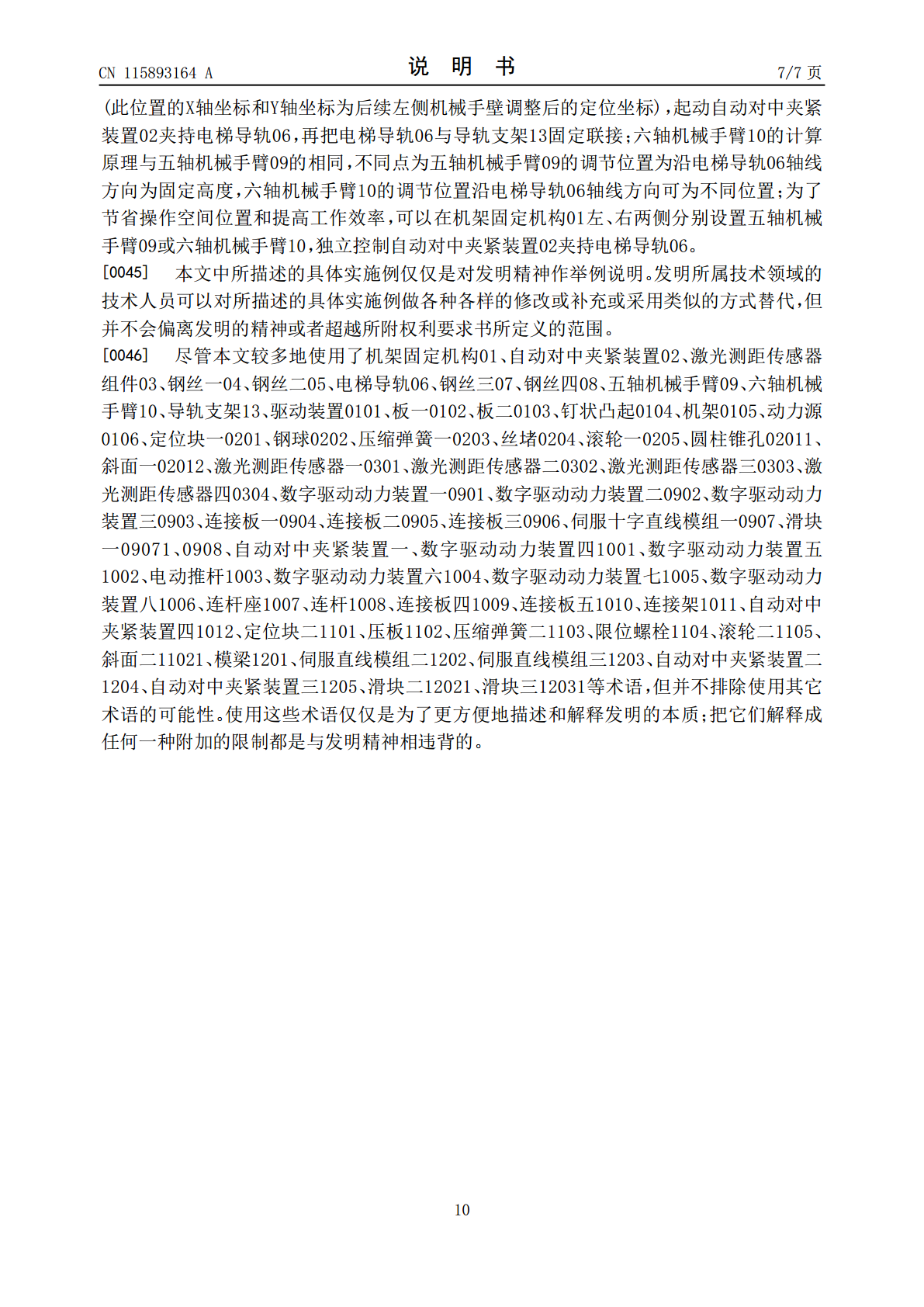
本发明公开了一种沿电梯导轨自动移动车辆的装置,包括:一推进支架,其通过用于在导轨上移动推进支架的相应装置进行水平移动,导轨被固定在另一导轨外侧上;至少包含一用于夹紧车辆一个车轮的双臂装置,所述推进支架是由两个相邻支架组成,双臂分别铰接在两个相邻支架,用于移动这两个相邻支架靠近或分开的装置被置于它们之间且互相连接,所述装置包含一杆,刚性连接到其中一支架,朝向另一支架,用于所述杆被滑动插入到套筒内,相应滑动块被安装在其中一支架,本发明要解决的问题和有益效果是:允许操作者不用手动和不用任何努力就可以执行必要的移

电梯导轨自动清洁装置.pdf
本发明提供一种能够在电梯运行时,将导轨上的灰尘及杂物去除或吸收,使导靴的滚轮或靴衬不致于吸附导轨上的灰尘及杂物,以提高导靴的使用寿命的电梯导轨自动清洁装置。它是在导靴上设置有与导轨表面相接触的毛刷。

一种电梯导轨校准装置.pdf
本发明提供了一种电梯导轨校准装置,包括用来设置在基准导轨上的激光发射装置,激光发射装置与基准导轨连接时两者是垂直的,激光发射装置发射至少三束激光,还包括用来设置在被校准导轨上的底部接收装置,所述底部接收装置设有夹具,所述夹具保证底部接收装置与被校准导轨连接时两者是垂直的,底部接收装置设有码盘,码盘上设有光斑接收点,所述光斑接收点的个数与激光束的个数相同,并且光斑接收点形成的三角形或多边形与激光束发光处形成的三角形或多边形全等。电梯安装时,利用本装置可进行对导轨的检验和校准,提高安装精度和效率;电梯维保时,