
基于误差补偿型扩张状态观测器的时延控制方法及系统.pdf

猫巷****志敏

1/10
2/10
3/10
4/10
5/10
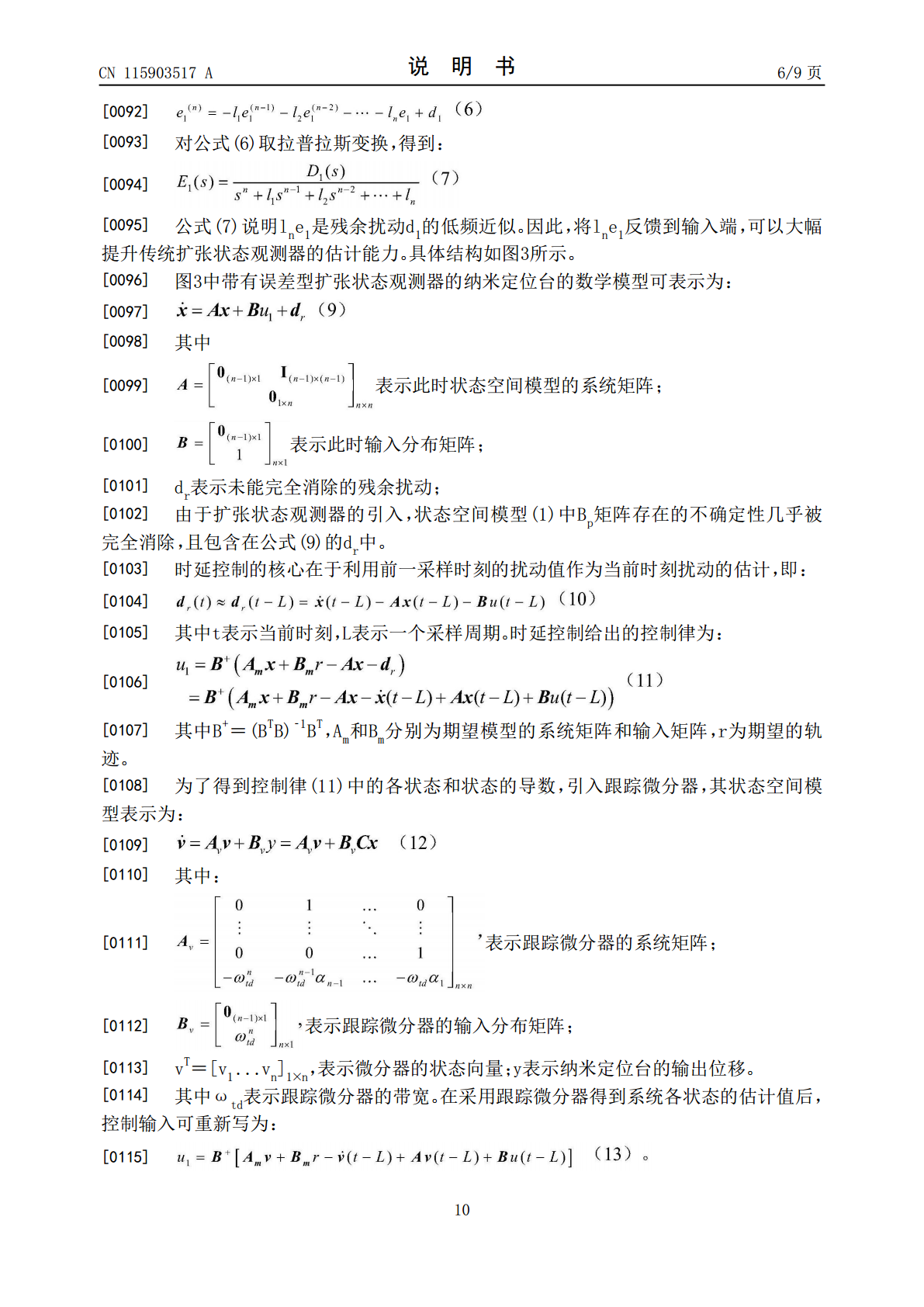
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于误差补偿型扩张状态观测器的时延控制方法及系统.pdf
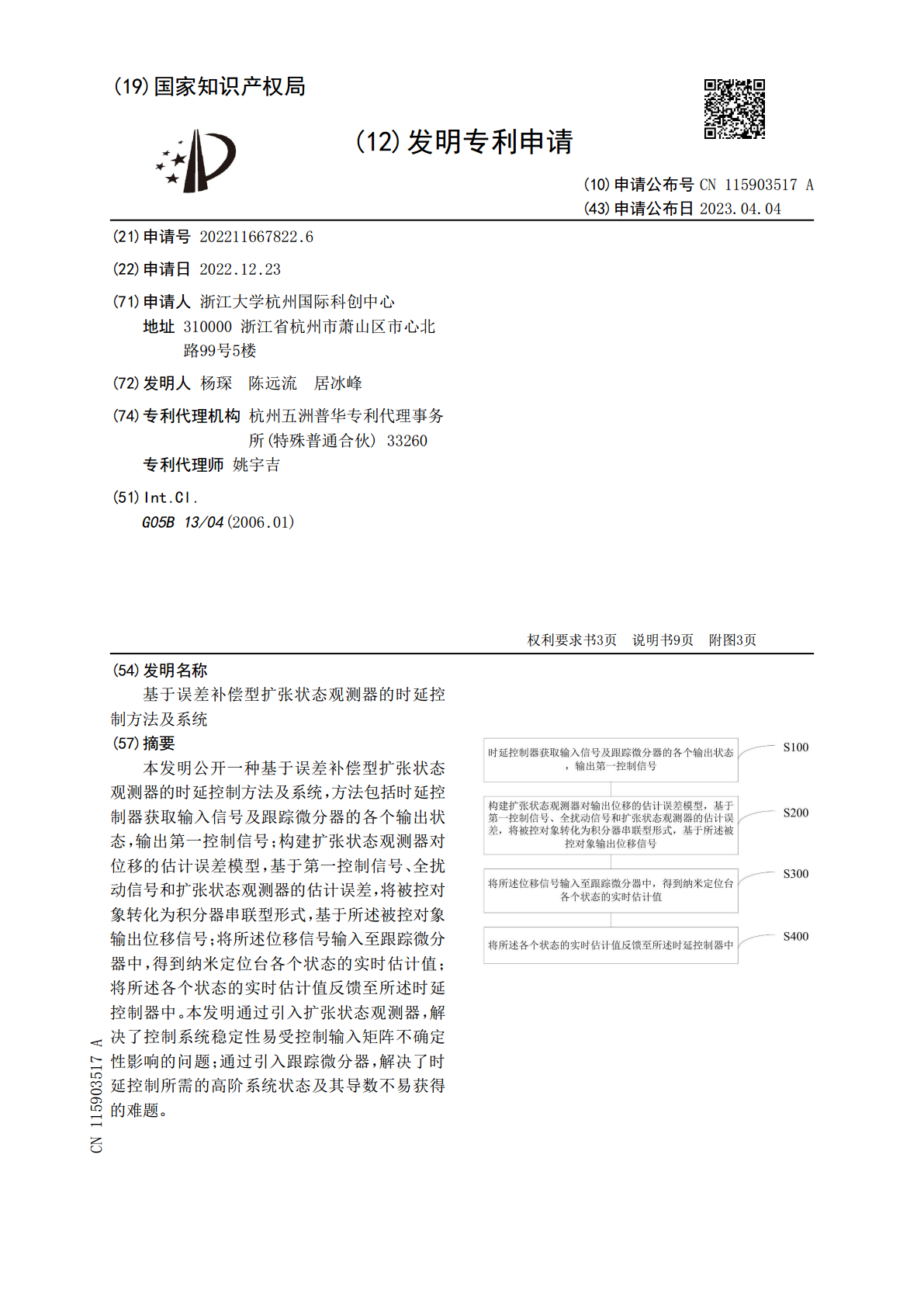
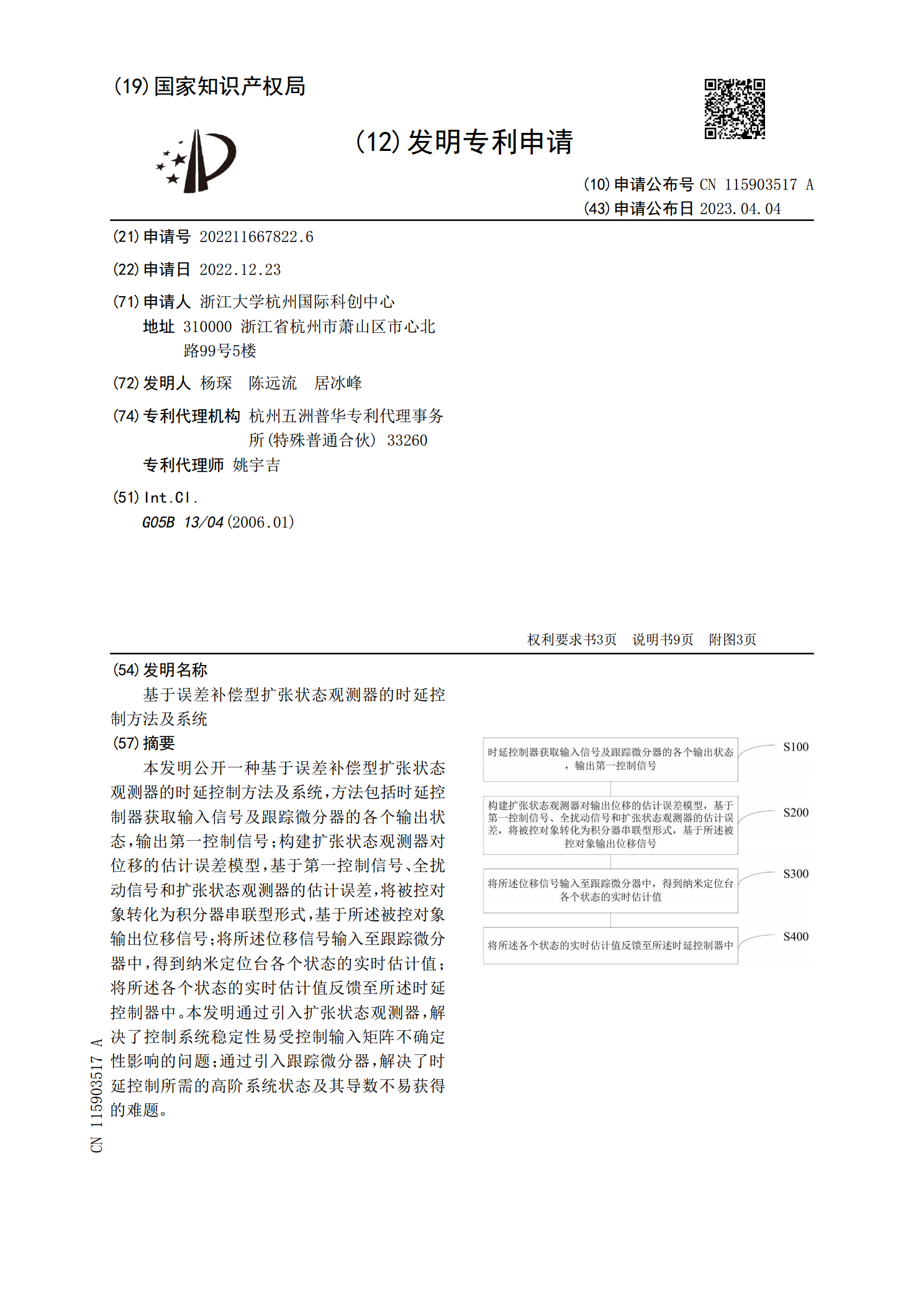
本发明公开一种基于误差补偿型扩张状态观测器的时延控制方法及系统,方法包括时延控制器获取输入信号及跟踪微分器的各个输出状态,输出第一控制信号;构建扩张状态观测器对位移的估计误差模型,基于第一控制信号、全扰动信号和扩张状态观测器的估计误差,将被控对象转化为积分器串联型形式,基于所述被控对象输出位移信号;将所述位移信号输入至跟踪微分器中,得到纳米定位台各个状态的实时估计值;将所述各个状态的实时估计值反馈至所述时延控制器中。本发明通过引入扩张状态观测器,解决了控制系统稳定性易受控制输入矩阵不确定性影响的问题;通过
基于误差补偿型扩张状态观测器的自抗扰控制方法及系统.pdf
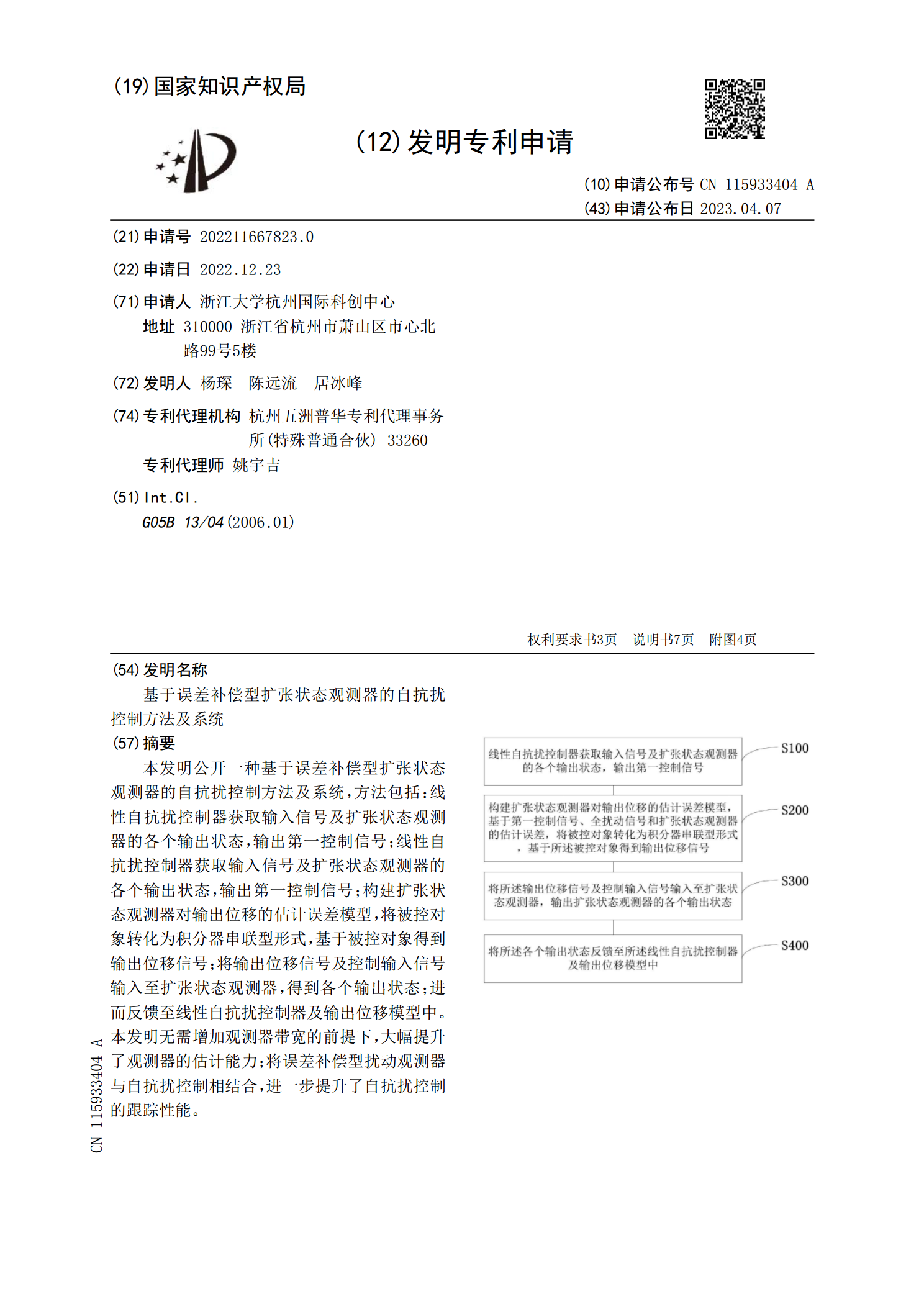
本发明公开一种基于误差补偿型扩张状态观测器的自抗扰控制方法及系统,方法包括:线性自抗扰控制器获取输入信号及扩张状态观测器的各个输出状态,输出第一控制信号;线性自抗扰控制器获取输入信号及扩张状态观测器的各个输出状态,输出第一控制信号;构建扩张状态观测器对输出位移的估计误差模型,将被控对象转化为积分器串联型形式,基于被控对象得到输出位移信号;将输出位移信号及控制输入信号输入至扩张状态观测器,得到各个输出状态;进而反馈至线性自抗扰控制器及输出位移模型中。本发明无需增加观测器带宽的前提下,大幅提升了观测器的估计能

基于扩张状态观测器的墨滴落点补偿.docx
基于扩张状态观测器的墨滴落点补偿摘要墨滴落点补偿是关于数字喷墨打印机中的一项核心技术,意在解决墨滴在喷射过程中可能会因为各种因素的干扰,导致落点位置偏移的问题。本文介绍了一种基于扩张状态观测器(ESO)的墨滴落点补偿技术,该技术能够在一定程度上消除墨滴落点偏移的影响,从而实现更精准的喷墨打印结果。关键词:墨滴落点补偿;数字喷墨打印机;扩张状态观测器;墨滴落点偏移AbstractInkdropcompensationisacoretechnologyindigitalinkjetprinters.Itspu

基于扩张状态观测器补偿的Boost变换器无源控制.pptx
基于扩张状态观测器补偿的Boost变换器无源控制目录添加章节标题Boost变换器无源控制原理Boost变换器的工作原理无源控制系统的基本概念无源性分析与设计方法扩张状态观测器设计状态观测器的原理扩张状态观测器的设计方法观测器增益的设计与优化基于观测器的补偿控制策略补偿控制的基本原理观测器补偿控制策略的构建补偿控制策略的稳定性分析仿真与实验验证仿真模型的建立与验证实验平台的搭建与测试实验结果的分析与比较结论与展望基于扩张状态观测器补偿的Boost变换器无源控制的优点与局限性未来研究的方向与展望THANKYO

基于时延补偿观测器的扰动抑制.docx
基于时延补偿观测器的扰动抑制基于时延补偿观测器的扰动抑制摘要:本文基于时延补偿观测器的扰动抑制方法进行研究,通过对系统中存在的时延进行补偿,实现对扰动的有效抑制。首先介绍了时延补偿观测器的原理和构造,然后通过数学模型的建立,分析了时延对系统性能的影响。接着,提出了基于时延补偿观测器的扰动抑制方法,并进行了仿真实验,验证了该方法的有效性。最后,对该方法的优点和不足进行了分析,并提出了改进思路。关键词:时延补偿观测器;扰动抑制;数学模型;仿真实验1.引言随着现代化工业的发展,对系统控制性能要求越来越高,扰动抑