
基于误差补偿型扩张状态观测器的自抗扰控制方法及系统.pdf

是你****噩呀

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于误差补偿型扩张状态观测器的自抗扰控制方法及系统.pdf
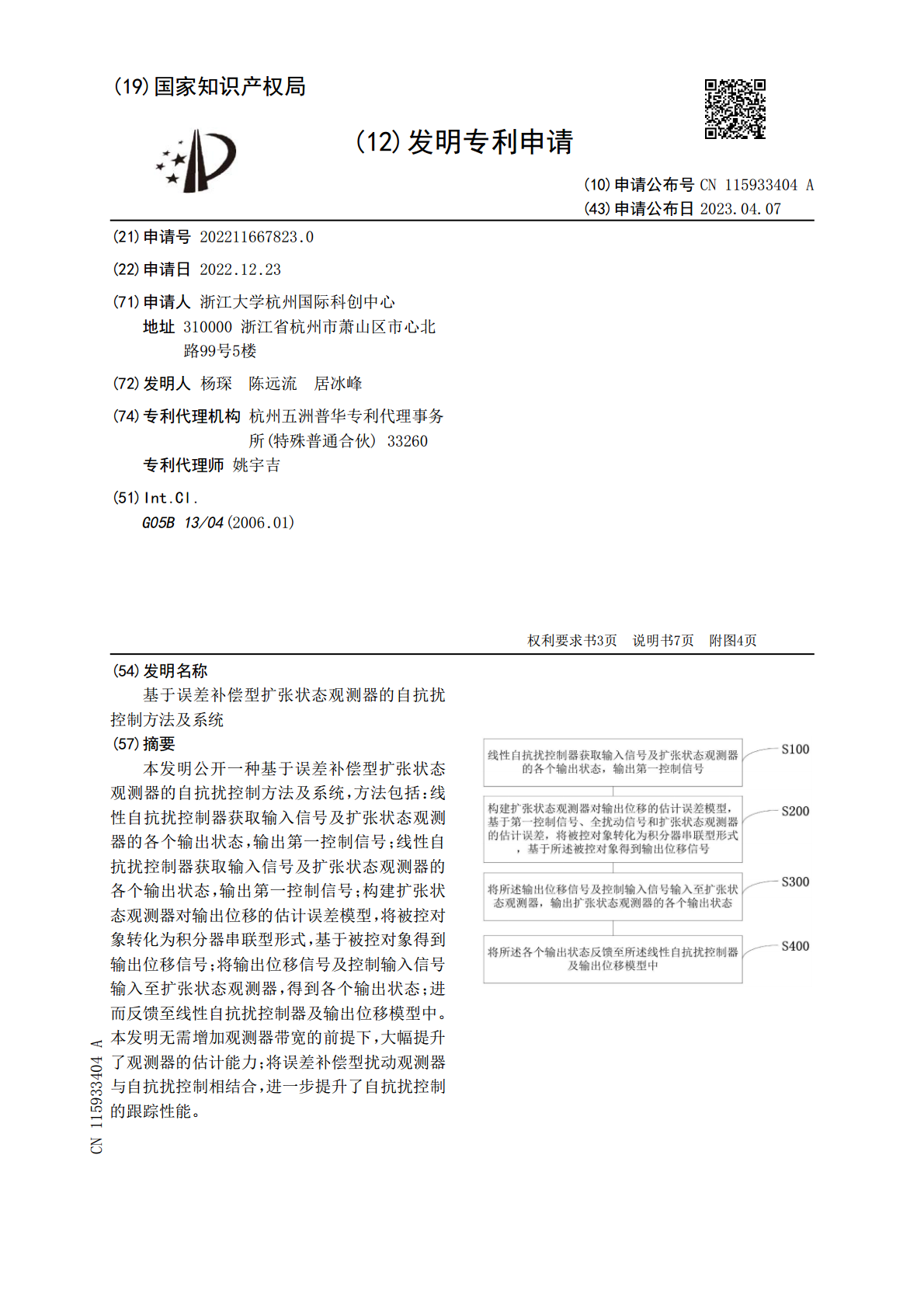
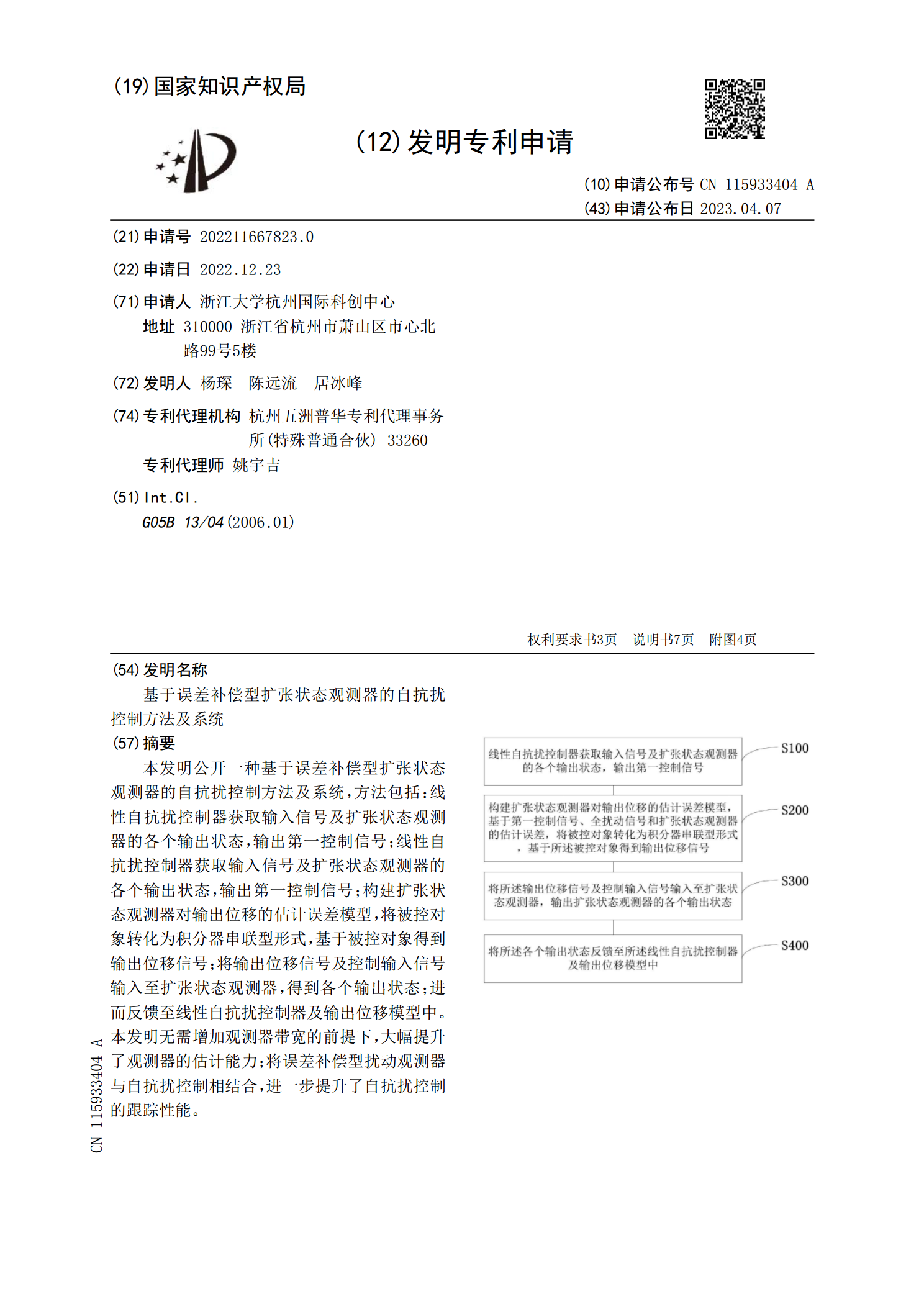
本发明公开一种基于误差补偿型扩张状态观测器的自抗扰控制方法及系统,方法包括:线性自抗扰控制器获取输入信号及扩张状态观测器的各个输出状态,输出第一控制信号;线性自抗扰控制器获取输入信号及扩张状态观测器的各个输出状态,输出第一控制信号;构建扩张状态观测器对输出位移的估计误差模型,将被控对象转化为积分器串联型形式,基于被控对象得到输出位移信号;将输出位移信号及控制输入信号输入至扩张状态观测器,得到各个输出状态;进而反馈至线性自抗扰控制器及输出位移模型中。本发明无需增加观测器带宽的前提下,大幅提升了观测器的估计能
基于误差补偿型扩张状态观测器的时延控制方法及系统.pdf
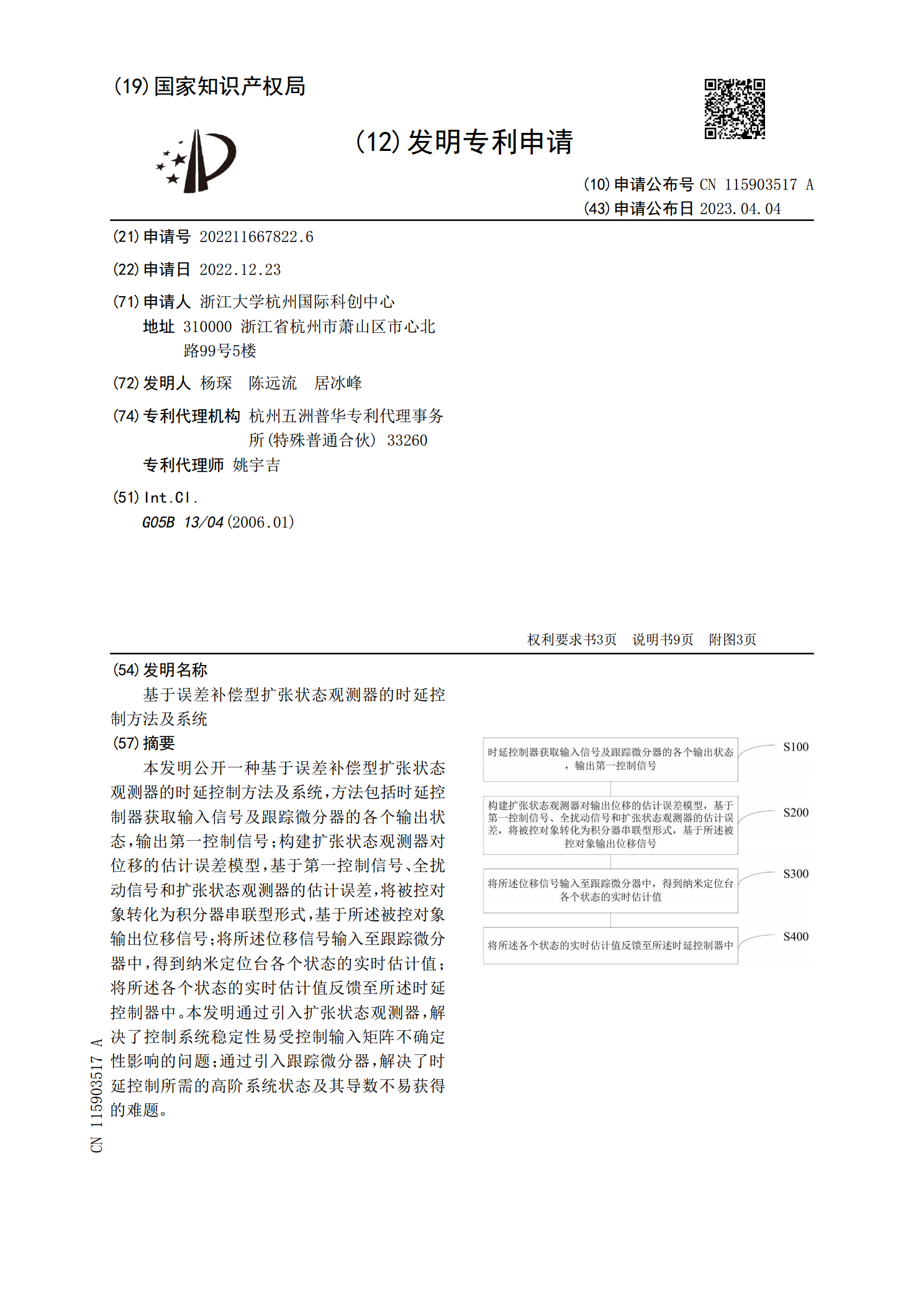
本发明公开一种基于误差补偿型扩张状态观测器的时延控制方法及系统,方法包括时延控制器获取输入信号及跟踪微分器的各个输出状态,输出第一控制信号;构建扩张状态观测器对位移的估计误差模型,基于第一控制信号、全扰动信号和扩张状态观测器的估计误差,将被控对象转化为积分器串联型形式,基于所述被控对象输出位移信号;将所述位移信号输入至跟踪微分器中,得到纳米定位台各个状态的实时估计值;将所述各个状态的实时估计值反馈至所述时延控制器中。本发明通过引入扩张状态观测器,解决了控制系统稳定性易受控制输入矩阵不确定性影响的问题;通过

基于扩张状态观测器和非线性状态误差反馈设计自抗扰振动控制器.docx
基于扩张状态观测器和非线性状态误差反馈设计自抗扰振动控制器基于扩张状态观测器和非线性状态误差反馈设计自抗扰振动控制器摘要:扩张状态观测器(ESO)和非线性状态误差反馈(NLEF)技术近年来在控制系统设计中得到了广泛的应用和研究。本论文针对振动控制问题,提出了一种基于ESO和NLEF技术的自抗扰振动控制器设计方法。通过引入ESO来估计系统的扩张状态,准确地估计系统的不确定性和外界干扰,然后利用NLEF技术对估计的状态误差进行补偿,实现对系统振动的有效控制。仿真结果表明,该控制器具有良好的控制性能和鲁棒性能,

基于扩张状态观测器的永磁同步电机自抗扰无源控制.docx
基于扩张状态观测器的永磁同步电机自抗扰无源控制基于扩张状态观测器的永磁同步电机自抗扰无源控制摘要:在永磁同步电机控制中,鲁棒性和抗干扰能力是关键问题。本文提出了一种基于扩张状态观测器的永磁同步电机自抗扰无源控制方法。该方法通过引入扩张状态观测器来估计未测量的状态变量,并利用自抗扰控制器来抑制外界干扰和模型误差。仿真结果表明,该方法能够在不知道负载扰动的情况下实现永磁同步电机的精确控制。关键词:永磁同步电机;自抗扰控制;扩张状态观测器;鲁棒性;抗干扰能力引言永磁同步电机因其高效率、高功率密度和良好的动态性能

基于扩张状态观测器的变形机翼抗饱和控制.docx
基于扩张状态观测器的变形机翼抗饱和控制基于扩张状态观测器的变形机翼抗饱和控制摘要:随着航空技术的不断发展,变形机翼作为一种新型的飞行器设计和控制方式,受到了广泛关注。然而,变形机翼系统在面临饱和控制问题时,传统的控制算法往往表现不佳。本文提出了一种基于扩张状态观测器的变形机翼抗饱和控制算法,通过引入扩张状态观测器来实时估计系统状态,结合传统控制算法用于实现对变形机翼系统的抗饱和控制。仿真结果表明,该方法能够有效地提高变形机翼系统的控制性能。关键词:变形机翼,抗饱和控制,扩张状态观测器1.引言随着航空技术的