
基于峭度时间序列和多特征图像融合的结构冲击定位方法.pdf

静芙****可爱

1/10
2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于峭度时间序列和多特征图像融合的结构冲击定位方法.pdf
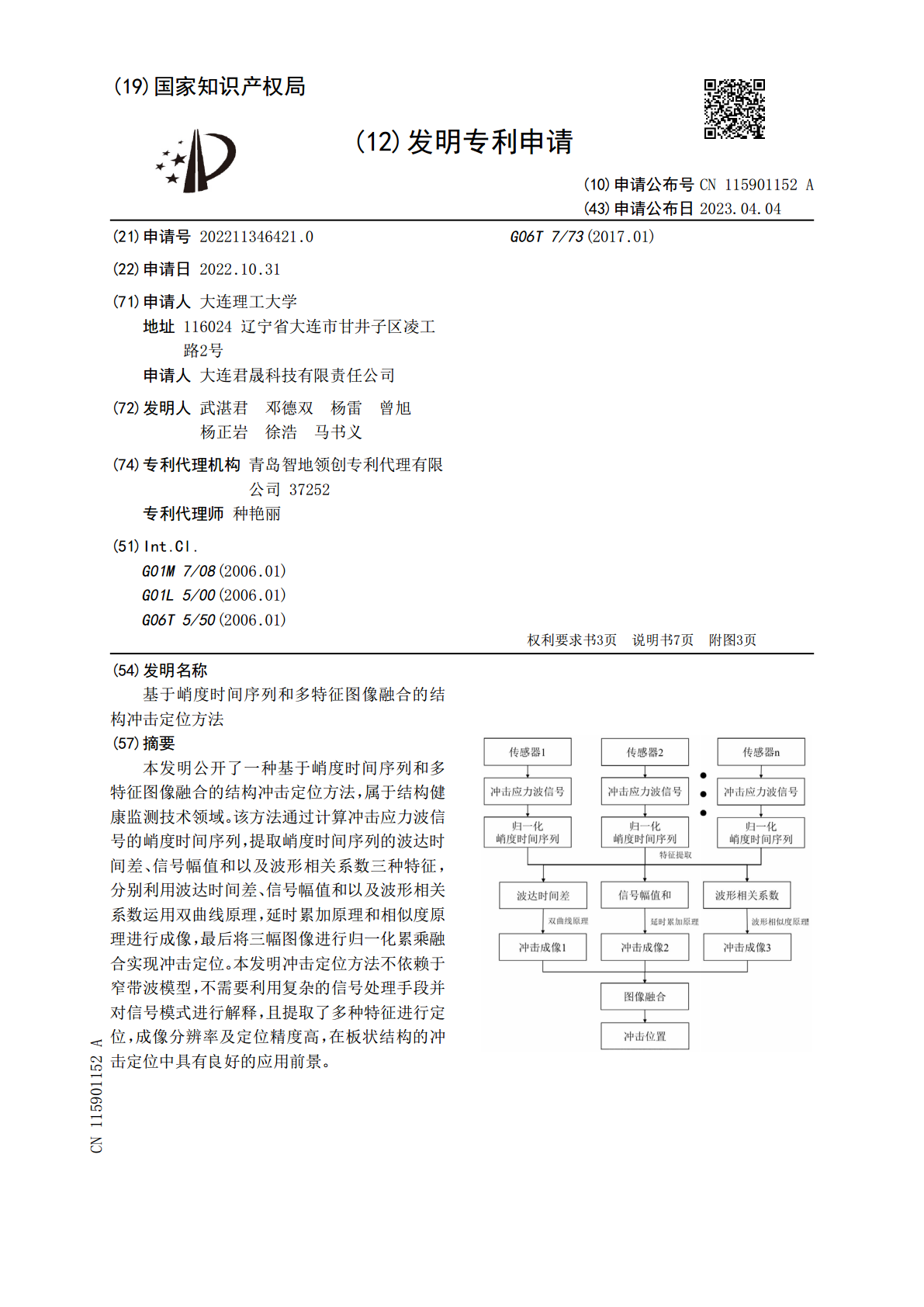
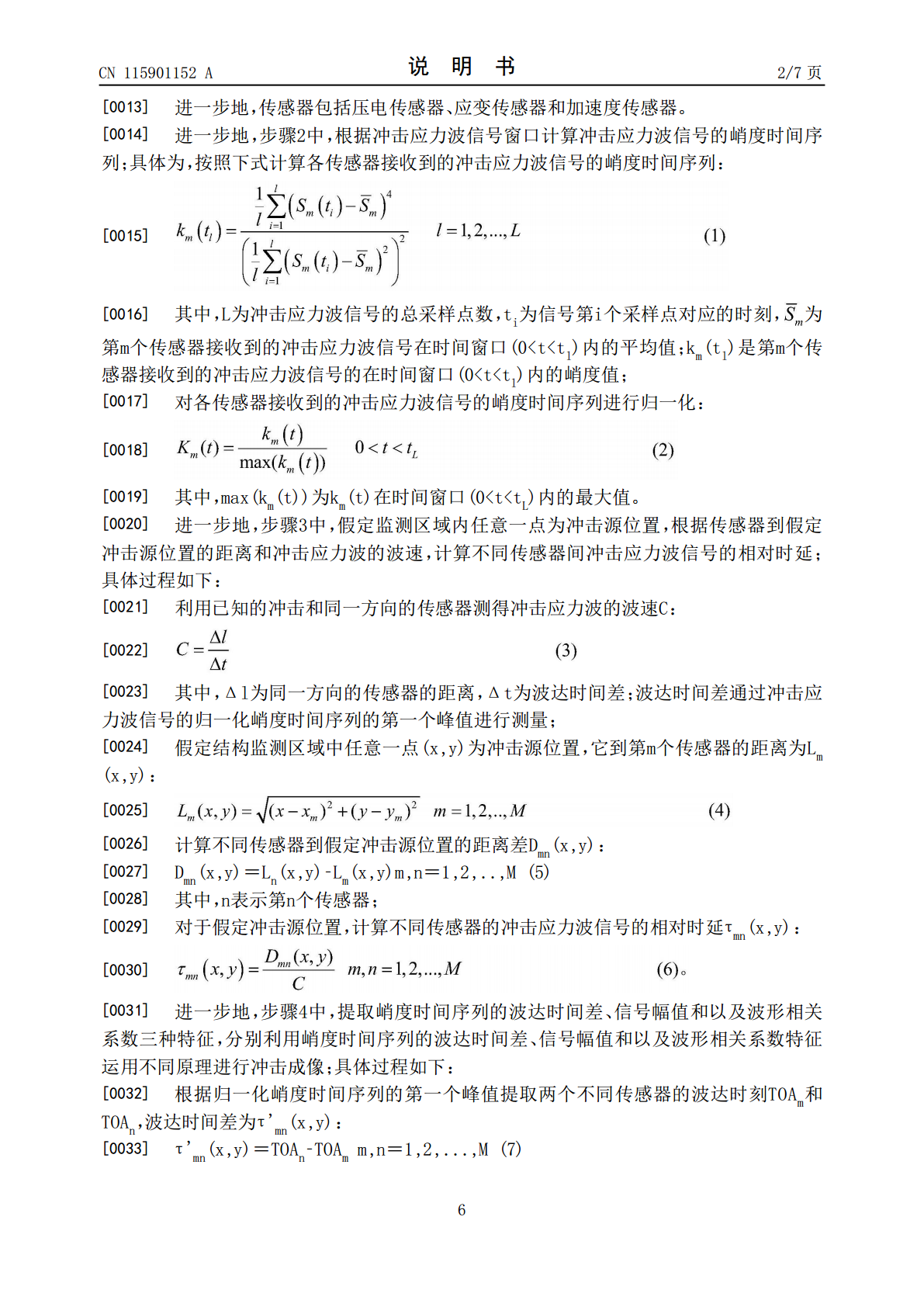
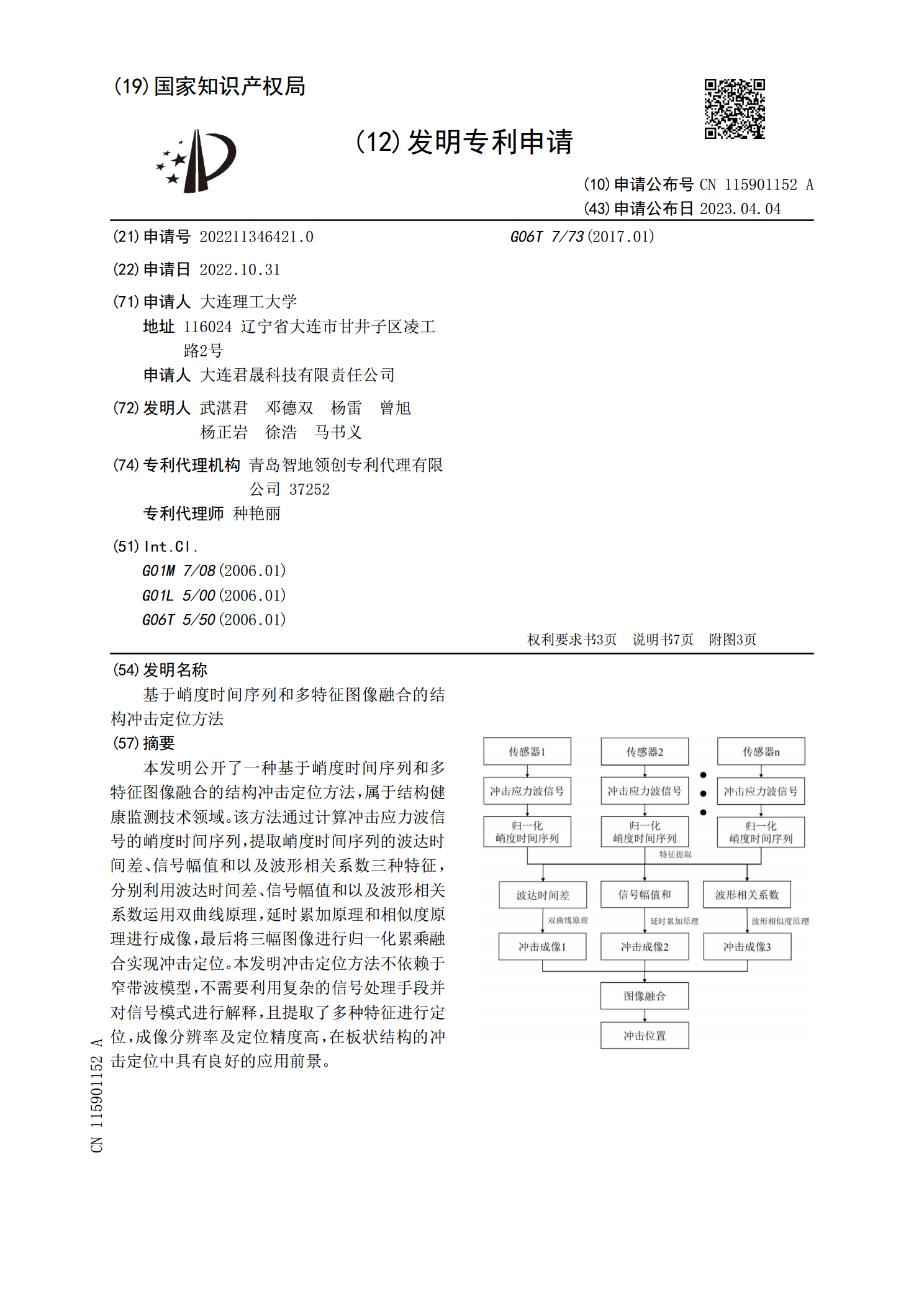
本发明公开了一种基于峭度时间序列和多特征图像融合的结构冲击定位方法,属于结构健康监测技术领域。该方法通过计算冲击应力波信号的峭度时间序列,提取峭度时间序列的波达时间差、信号幅值和以及波形相关系数三种特征,分别利用波达时间差、信号幅值和以及波形相关系数运用双曲线原理,延时累加原理和相似度原理进行成像,最后将三幅图像进行归一化累乘融合实现冲击定位。本发明冲击定位方法不依赖于窄带波模型,不需要利用复杂的信号处理手段并对信号模式进行解释,且提取了多种特征进行定位,成像分辨率及定位精度高,在板状结构的冲击定位中具有

基于图像全序列特征权重的多曝光图像融合方法.docx
基于图像全序列特征权重的多曝光图像融合方法基于图像全序列特征权重的多曝光图像融合方法摘要:随着数码相机和智能手机的普及,多曝光(ME)技术在数字摄影中得到了广泛应用。多曝光可以通过叠加和融合不同曝光程度的多张图像,以获得更大动态范围和更丰富的细节。目前,多曝光图像融合方案主要基于图像的像素级别操作,忽视了不同曝光图像之间的全局关系。本文提出了一种新的多曝光图像融合方法,利用图像全序列特征权重,将全局信息引入到融合过程中。实验证明,所提方法在融合结果的动态范围和细节保留方面明显优于传统方法。1.引言在数字摄

基于图像的多特征融合提取图像关注度的方法.pdf
本发明公开了一种基于图像的多特征融合提取图像关注度的方法,该方法包括其具体步骤如下:(1)输入图像,分别提取每个区域的多个特征;(2)进行多个特征融合,计算区域关注度;(3)通过图像中每个像素点的像素值与每个区域的均值的相近程度,将上述区域关注度转化为图像中每个像素点k的关注度,提取图像关注度。该方法采用多个特征融合,计算区域关注度,不仅能准确地定位人眼关注的位置,而且能准确地凸显关注物体的整个区域和外围轮廓,更满足人眼的视觉要求,并且具有准确度高且实时性好的特点,在机器视觉、对象分割、目标跟踪等领域有很
基于波形相似度和多频率综合的结构冲击成像定位方法.pdf
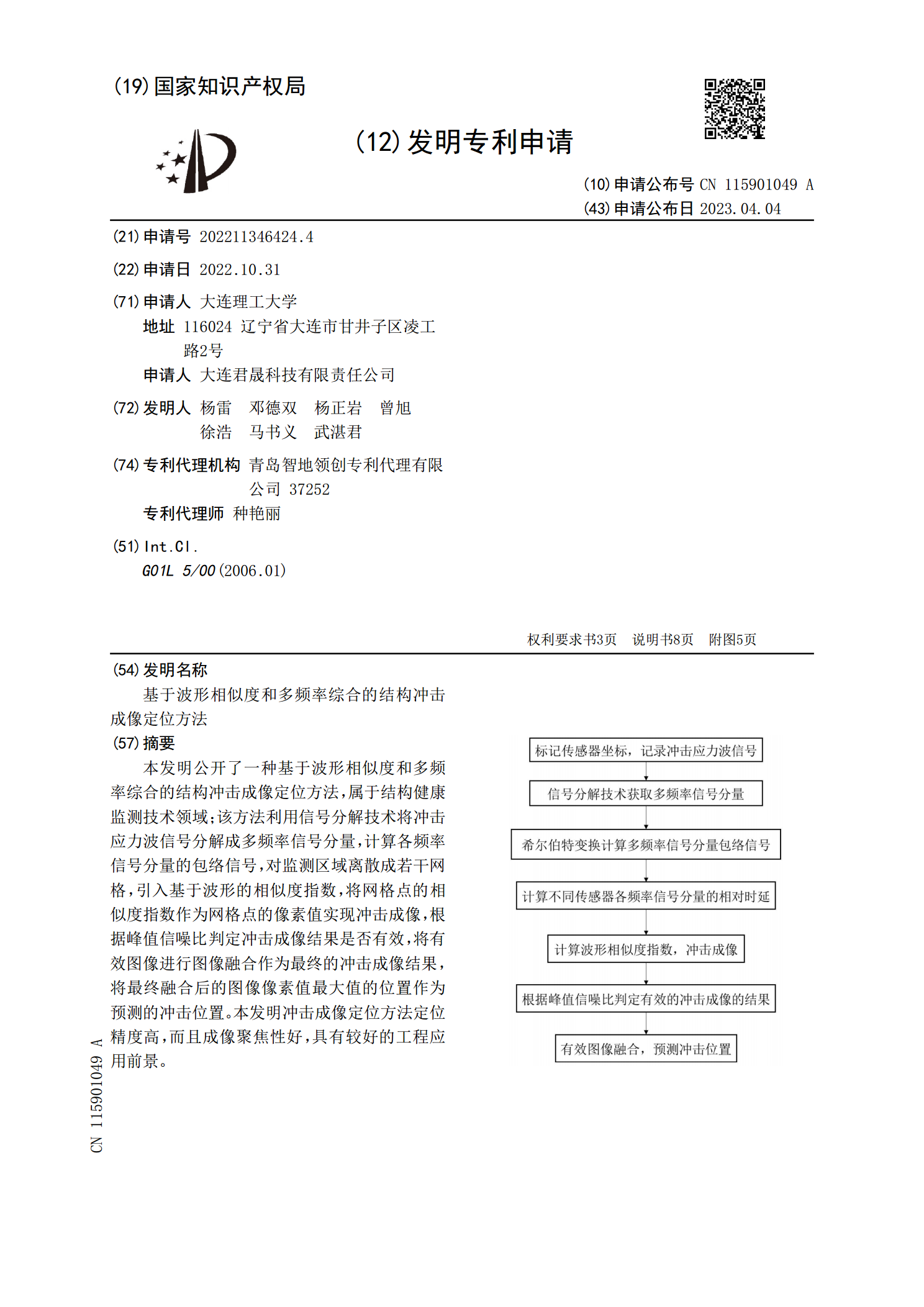
本发明公开了一种基于波形相似度和多频率综合的结构冲击成像定位方法,属于结构健康监测技术领域;该方法利用信号分解技术将冲击应力波信号分解成多频率信号分量,计算各频率信号分量的包络信号,对监测区域离散成若干网格,引入基于波形的相似度指数,将网格点的相似度指数作为网格点的像素值实现冲击成像,根据峰值信噪比判定冲击成像结果是否有效,将有效图像进行图像融合作为最终的冲击成像结果,将最终融合后的图像像素值最大值的位置作为预测的冲击位置。本发明冲击成像定位方法定位精度高,而且成像聚焦性好,具有较好的工程应用前景。
一种基于点特征和轮廓特征融合的图像匹配定位方法.pdf
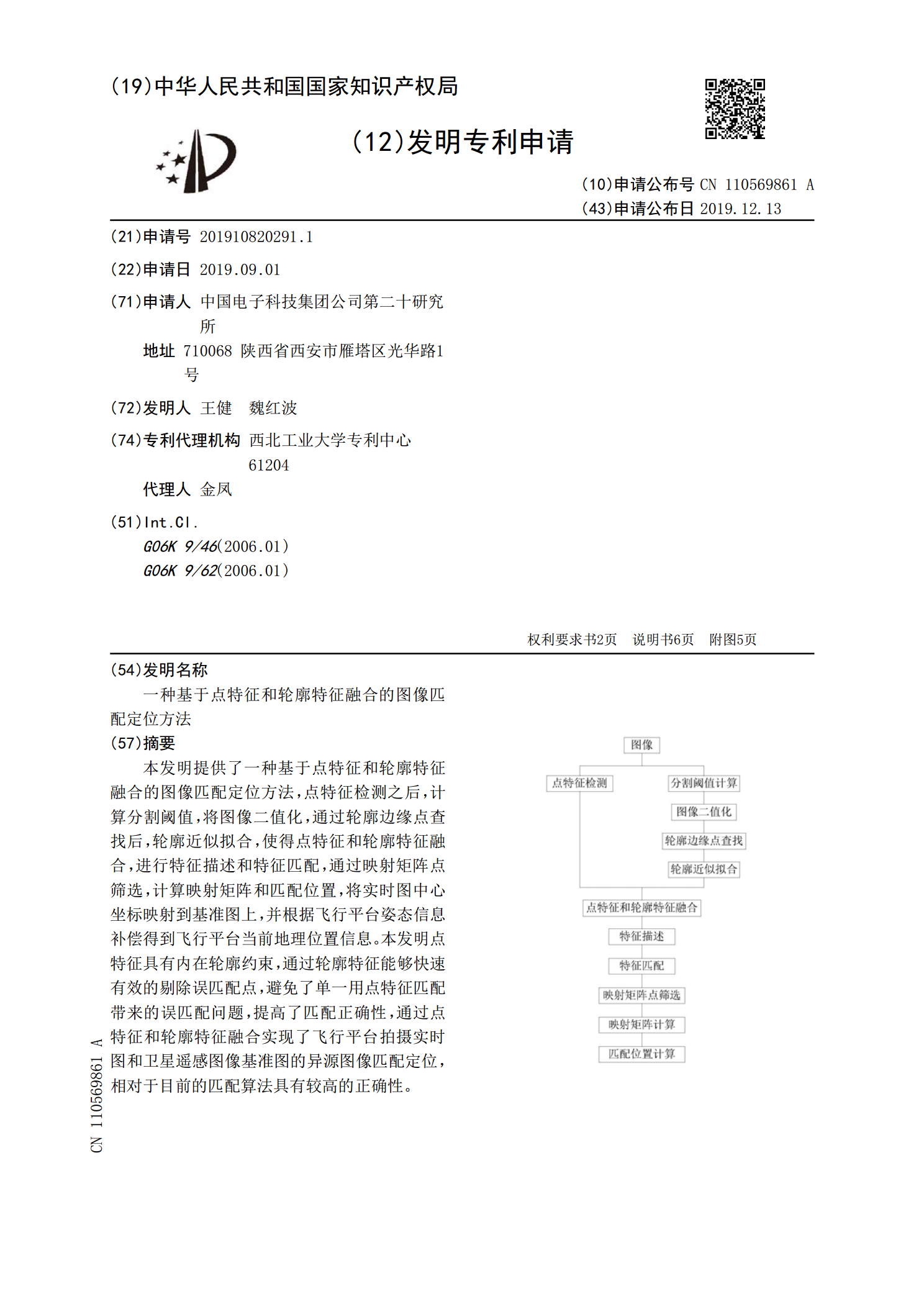
本发明提供了一种基于点特征和轮廓特征融合的图像匹配定位方法,点特征检测之后,计算分割阈值,将图像二值化,通过轮廓边缘点查找后,轮廓近似拟合,使得点特征和轮廓特征融合,进行特征描述和特征匹配,通过映射矩阵点筛选,计算映射矩阵和匹配位置,将实时图中心坐标映射到基准图上,并根据飞行平台姿态信息补偿得到飞行平台当前地理位置信息。本发明点特征具有内在轮廓约束,通过轮廓特征能够快速有效的剔除误匹配点,避免了单一用点特征匹配带来的误匹配问题,提高了匹配正确性,通过点特征和轮廓特征融合实现了飞行平台拍摄实时图和卫星遥感图