
一种大跨度门式斗轮机大车行走自动纠偏系统.pdf

一条****贺6


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种大跨度门式斗轮机大车行走自动纠偏系统.pdf
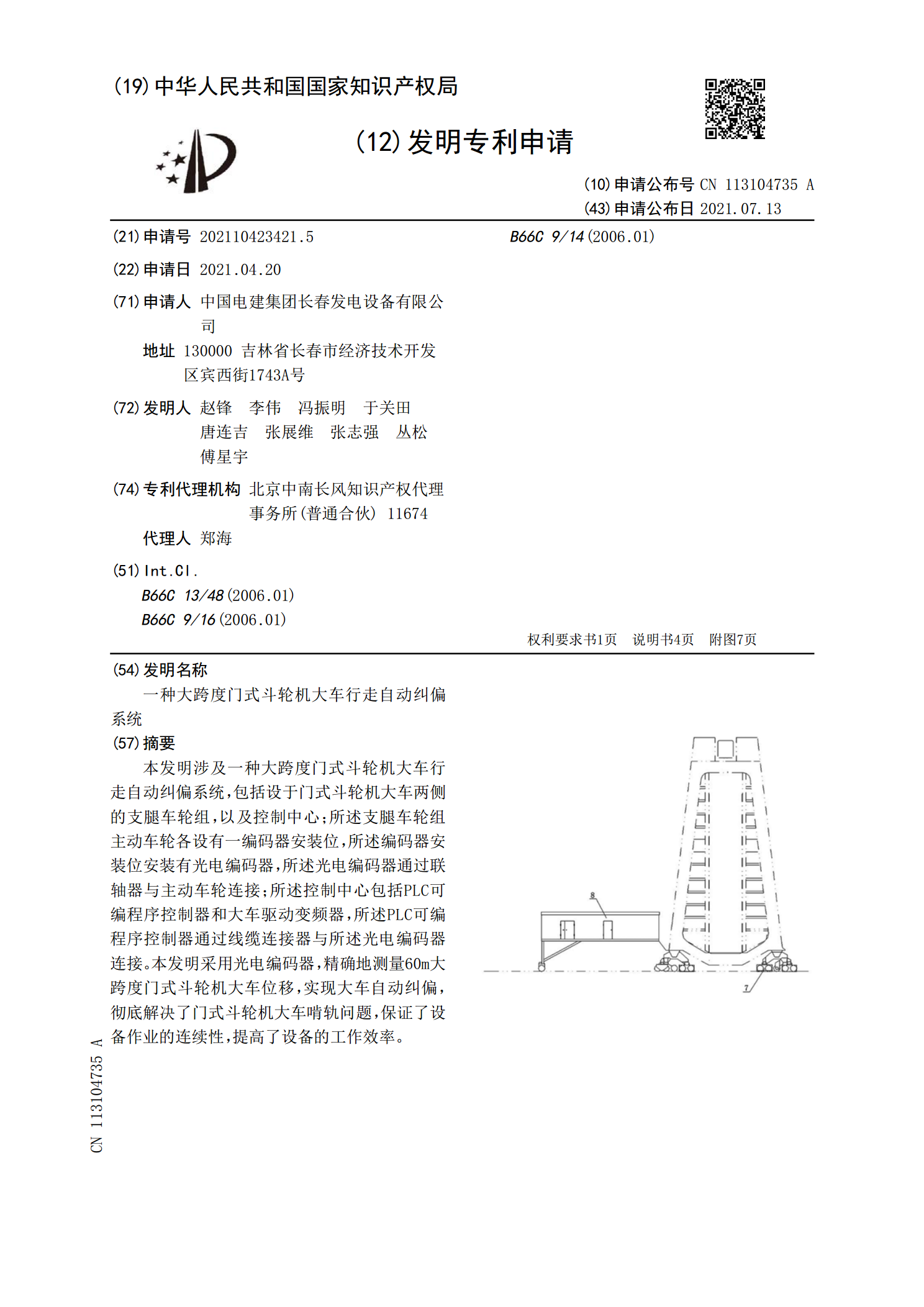
本发明涉及一种大跨度门式斗轮机大车行走自动纠偏系统,包括设于门式斗轮机大车两侧的支腿车轮组,以及控制中心;所述支腿车轮组主动车轮各设有一编码器安装位,所述编码器安装位安装有光电编码器,所述光电编码器通过联轴器与主动车轮连接;所述控制中心包括PLC可编程序控制器和大车驱动变频器,所述PLC可编程序控制器通过线缆连接器与所述光电编码器连接。本发明采用光电编码器,精确地测量60m大跨度门式斗轮机大车位移,实现大车自动纠偏,彻底解决了门式斗轮机大车啃轨问题,保证了设备作业的连续性,提高了设备的工作效率。

大跨度门机的自动电气纠偏系统.doc
大跨度龙门起重机的电气自动纠偏系统浙江省三门阳光电器有限公司赵国庆问题的提出大跨度大于40米的龙门起重机在实际使用中由于众多因素的影响,如大车轨道高低和平行偏差造成运行阻力的不同,走轮直径的偏差,电动机转速的偏差,刚、柔腿运行一段时间后会产生快慢不一的现象,通常当偏差接近跨度的5/1000时,起重机就应自动减速纠偏,驾驶员也可以根据偏差指示仪进行手动纠偏;当偏差超过跨度的5/1000时,偏斜限制器就自动断开大车运行控制回路,使起重机自动停车。二,常用电气自动纠偏的方法大跨度门

一种大跨度门式起重机纠偏系统研究及应用.docx
一种大跨度门式起重机纠偏系统研究及应用标题:一种大跨度门式起重机纠偏系统研究及应用摘要:大跨度门式起重机广泛应用于工业生产与建筑领域,其臂架结构设计复杂,易产生不平衡偏移现象,对工作效率与安全性带来一定影响。本文研究并设计了一种大跨度门式起重机纠偏系统,旨在解决当前存在的问题,并提高起重机运行的平衡性与稳定性。通过对纠偏系统的结构和控制方法的研究,验证了该系统在实际应用中的效果,实验结果表明,该纠偏系统为大跨度门式起重机的安全运行和提高工作效率提供了有力的技术支持。关键词:起重机、纠偏系统、大跨度、臂架结
桥、门式起重机大车行走纠偏和防啃轨装置及方法.pdf
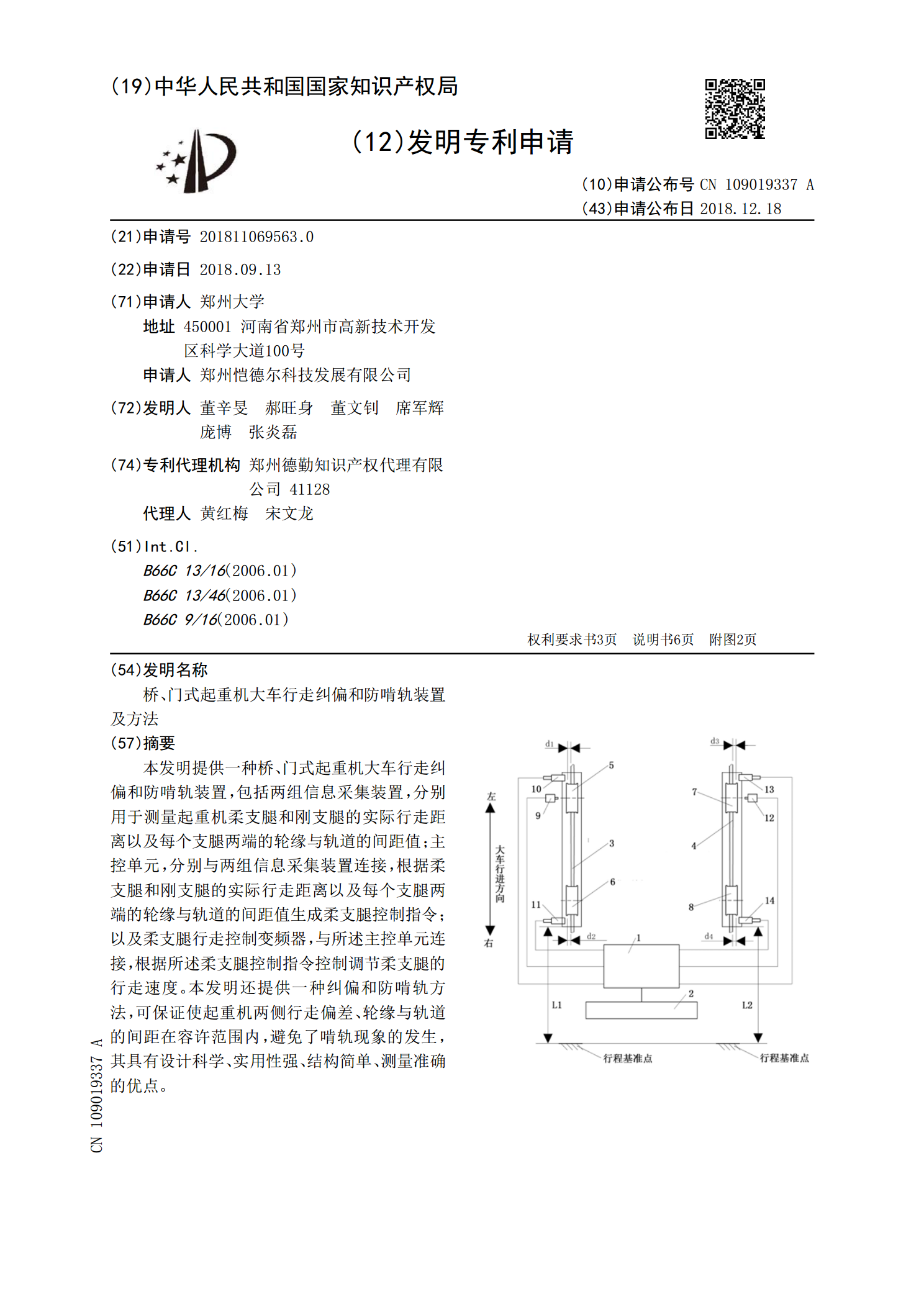
本发明提供一种桥、门式起重机大车行走纠偏和防啃轨装置,包括两组信息采集装置,分别用于测量起重机柔支腿和刚支腿的实际行走距离以及每个支腿两端的轮缘与轨道的间距值;主控单元,分别与两组信息采集装置连接,根据柔支腿和刚支腿的实际行走距离以及每个支腿两端的轮缘与轨道的间距值生成柔支腿控制指令;以及柔支腿行走控制变频器,与所述主控单元连接,根据所述柔支腿控制指令控制调节柔支腿的行走速度。本发明还提供一种纠偏和防啃轨方法,可保证使起重机两侧行走偏差、轮缘与轨道的间距在容许范围内,避免了啃轨现象的发生,其具有设计科学、

一种桥、门式起重机大车行走纠偏和防啃轨装置及使用方法.pdf
本发明涉及起重机领域,具体涉及一种桥、门式起重机大车行走纠偏和防啃轨装置,包括大车轮组和纠偏防啃轨装置,所述纠偏防啃轨装置设置于大车轮组上,本发明的桥、门式起重机大车行走纠偏和防啃轨装置,具有纠偏防啃轨装置,通过纠偏防啃轨装置可在大车轮组发生倾斜时及时对其进行修正,防止大车轮组因行进速度不一致导致啃轨,有效增长大车行走轮及行走轨的使用寿命,同时有效降低安全隐患,防止大车脱轨,在修正完毕后可对大车轮组位置进行限定,具有较强的实用效果,本装置结构简单合理,同时具有较强的实用意义,适用性较强,造价较低,利于推广