
一种桥、门式起重机大车行走纠偏和防啃轨装置及使用方法.pdf

宁馨****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
桥、门式起重机大车行走纠偏和防啃轨装置及方法.pdf
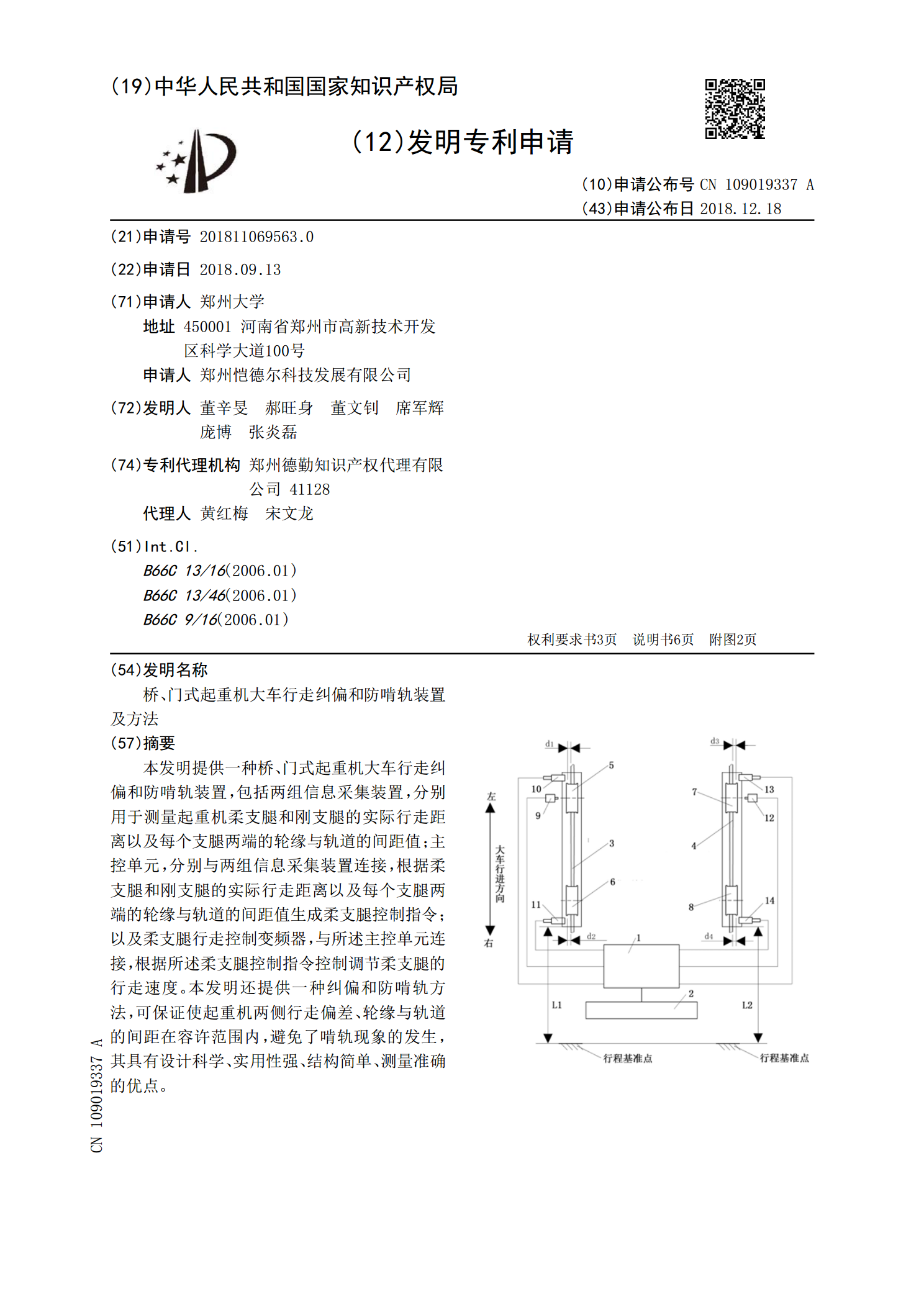
本发明提供一种桥、门式起重机大车行走纠偏和防啃轨装置,包括两组信息采集装置,分别用于测量起重机柔支腿和刚支腿的实际行走距离以及每个支腿两端的轮缘与轨道的间距值;主控单元,分别与两组信息采集装置连接,根据柔支腿和刚支腿的实际行走距离以及每个支腿两端的轮缘与轨道的间距值生成柔支腿控制指令;以及柔支腿行走控制变频器,与所述主控单元连接,根据所述柔支腿控制指令控制调节柔支腿的行走速度。本发明还提供一种纠偏和防啃轨方法,可保证使起重机两侧行走偏差、轮缘与轨道的间距在容许范围内,避免了啃轨现象的发生,其具有设计科学、

一种桥、门式起重机大车行走纠偏和防啃轨装置及使用方法.pdf
本发明涉及起重机领域,具体涉及一种桥、门式起重机大车行走纠偏和防啃轨装置,包括大车轮组和纠偏防啃轨装置,所述纠偏防啃轨装置设置于大车轮组上,本发明的桥、门式起重机大车行走纠偏和防啃轨装置,具有纠偏防啃轨装置,通过纠偏防啃轨装置可在大车轮组发生倾斜时及时对其进行修正,防止大车轮组因行进速度不一致导致啃轨,有效增长大车行走轮及行走轨的使用寿命,同时有效降低安全隐患,防止大车脱轨,在修正完毕后可对大车轮组位置进行限定,具有较强的实用效果,本装置结构简单合理,同时具有较强的实用意义,适用性较强,造价较低,利于推广

一种起重机大车、小车运行防脱轨、防啃轨装置.pdf
本发明公开了一种起重机大车、小车运行防脱轨、防啃轨装置,本发明解决了起重机大车、小车运行机构的啃轨、脱轨现象,避免了车轮组在运行过程中车轮轮沿和大车、小车轨道之间的磨损,增强了起重机运行时稳定性,降低起重机运行侧向摩擦阻力,减小车轮与轨道的摩擦噪音。

桥式吊车大车啃轨问题的探讨.docx
桥式吊车大车啃轨问题的探讨桥式吊车大车啃轨问题的探讨摘要:桥式吊车大车啃轨问题是指桥式吊车大车在行走过程中对轨道造成的损坏现象。本文将从造成问题的原因、影响因素、解决途径等方面进行探讨,以期提出有效解决方案。一、问题概述桥式吊车大车啃轨问题是桥式吊车在行走过程中对轨道造成一定程度的损坏现象。这种问题在实际施工中经常出现,对于轨道设施的正常运行和维护带来很大的困扰,因此有必要对其原因和解决方案进行深入研究。二、问题原因1.轴承问题:桥式吊车大车的轴承在长时间使用过程中容易磨损或失效,从而导致轮轴在行走过程中

一起门式起重机大车车轮啃轨的原因分析.docx
一起门式起重机大车车轮啃轨的原因分析门式起重机是一种常见的重型起重设备,由于其体型巨大,通常需要在固定的轨道上进行移动。在操作过程中,很多人会发现大车车轮容易啃轨的问题,这种现象不仅会影响设备的正常使用,还可能会给工作人员带来危险。因此,了解门式起重机大车车轮啃轨的原因,对避免此类问题的发生具有重要意义。一、门式起重机大车车轮啃轨的原因1.车轮质量过大门式起重机的大车车轮是支撑整个设备的关键部位之一,因此,它的质量必须要保持在适当的范围内。如果车轮质量过大,那么在移动的过程中,就会对轨道形成过大的压力,从