
一种腿轮结合式爬楼机.pdf

是你****馨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种腿轮结合式爬楼机.pdf
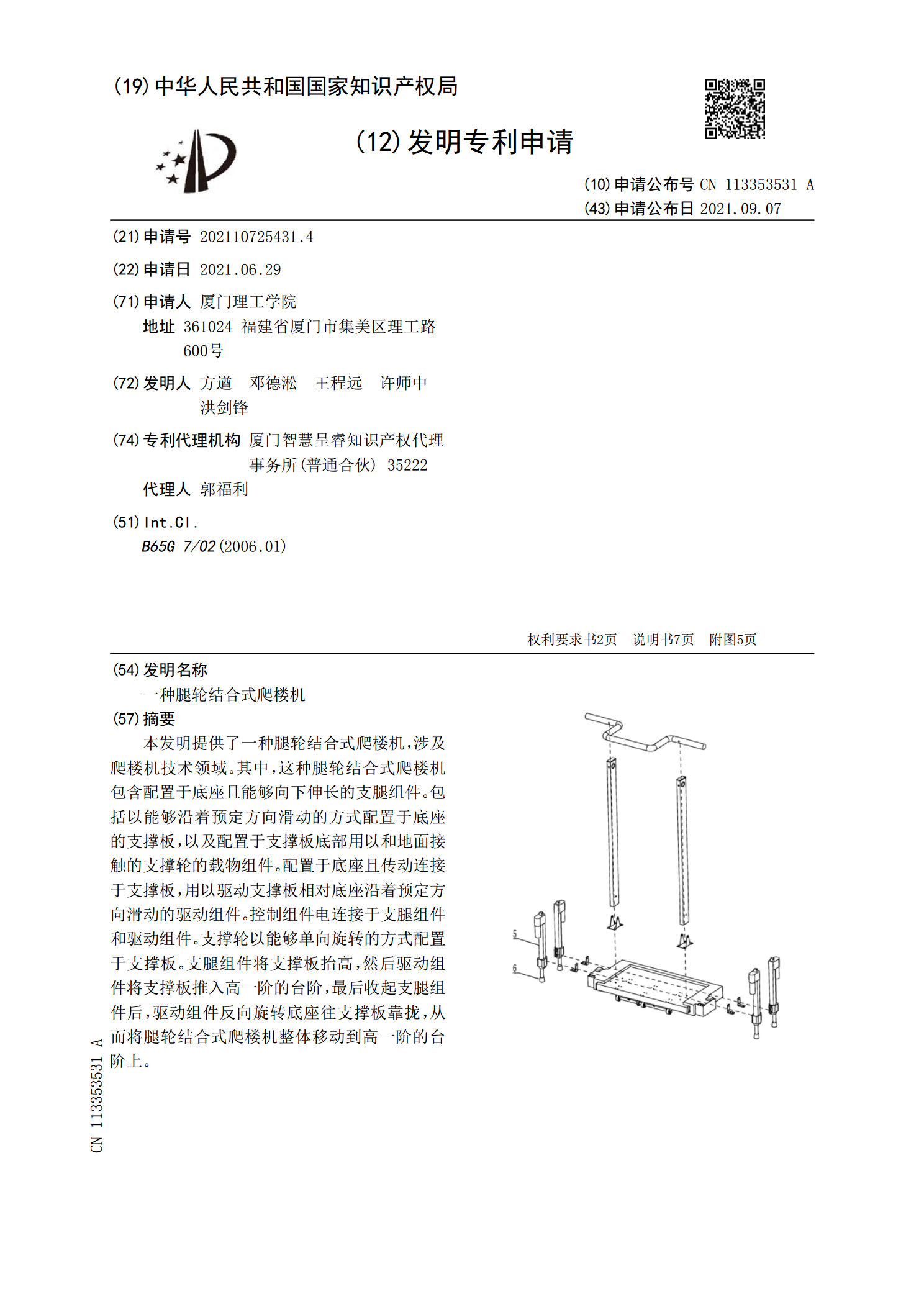
本发明提供了一种腿轮结合式爬楼机,涉及爬楼机技术领域。其中,这种腿轮结合式爬楼机包含配置于底座且能够向下伸长的支腿组件。包括以能够沿着预定方向滑动的方式配置于底座的支撑板,以及配置于支撑板底部用以和地面接触的支撑轮的载物组件。配置于底座且传动连接于支撑板,用以驱动支撑板相对底座沿着预定方向滑动的驱动组件。控制组件电连接于支腿组件和驱动组件。支撑轮以能够单向旋转的方式配置于支撑板。支腿组件将支撑板抬高,然后驱动组件将支撑板推入高一阶的台阶,最后收起支腿组件后,驱动组件反向旋转底座往支撑板靠拢,从而将腿轮结合

一种腿轮复合式结构的电动爬楼轮椅.pdf
一种腿轮复合式结构的电动爬楼轮椅,座椅下固定框架,框架左右两侧设支撑板,支撑板上端设移动模块,在移动模块下设电动推杆模块。在框架下设电机保持架C,电机保持架C与第二驱动电机固接,在第二驱动电机的中部设驱动轴,驱动轴上设第二链轮,第二链轮与第一链轮链接,第一链轮外侧设驱动轮,驱动轮与框架固接。以座椅的纵向中心为对称轴,部件两边对称。在框架的下部固接控制箱,控制箱中设电源、PC主板、电机驱动器等电子元件,电源与PC主板、电动机驱动器串联,电机驱动器分别与控制器电路、第一驱动电机电路、第二驱动电机电路并联。本发
一种轮腿复合式的水平姿态载物爬楼机器人.pdf
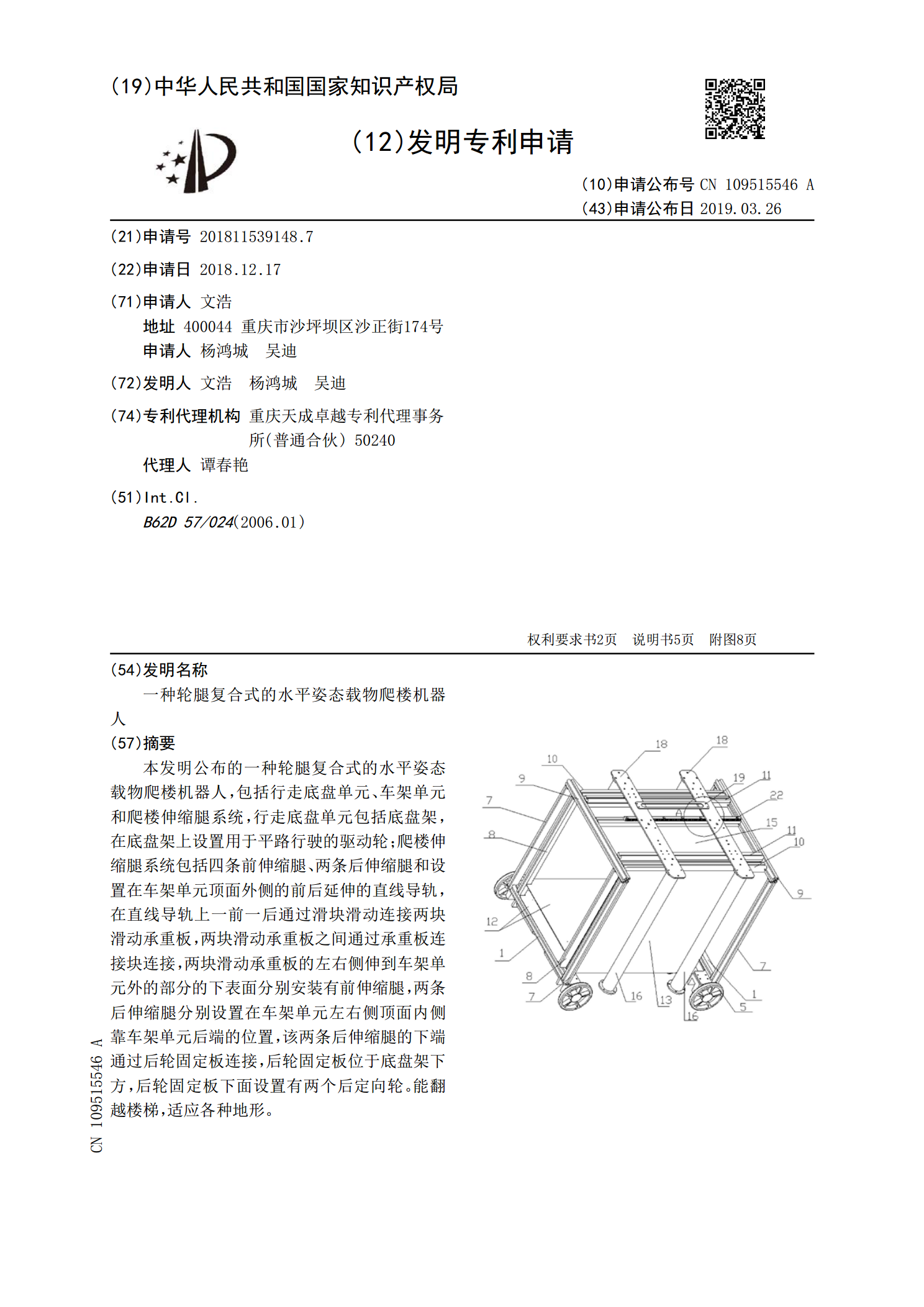
本发明公布的一种轮腿复合式的水平姿态载物爬楼机器人,包括行走底盘单元、车架单元和爬楼伸缩腿系统,行走底盘单元包括底盘架,在底盘架上设置用于平路行驶的驱动轮;爬楼伸缩腿系统包括四条前伸缩腿、两条后伸缩腿和设置在车架单元顶面外侧的前后延伸的直线导轨,在直线导轨上一前一后通过滑块滑动连接两块滑动承重板,两块滑动承重板之间通过承重板连接块连接,两块滑动承重板的左右侧伸到车架单元外的部分的下表面分别安装有前伸缩腿,两条后伸缩腿分别设置在车架单元左右侧顶面内侧靠车架单元后端的位置,该两条后伸缩腿的下端通过后轮固定板连
一种轮腿式爬楼机器人.pdf
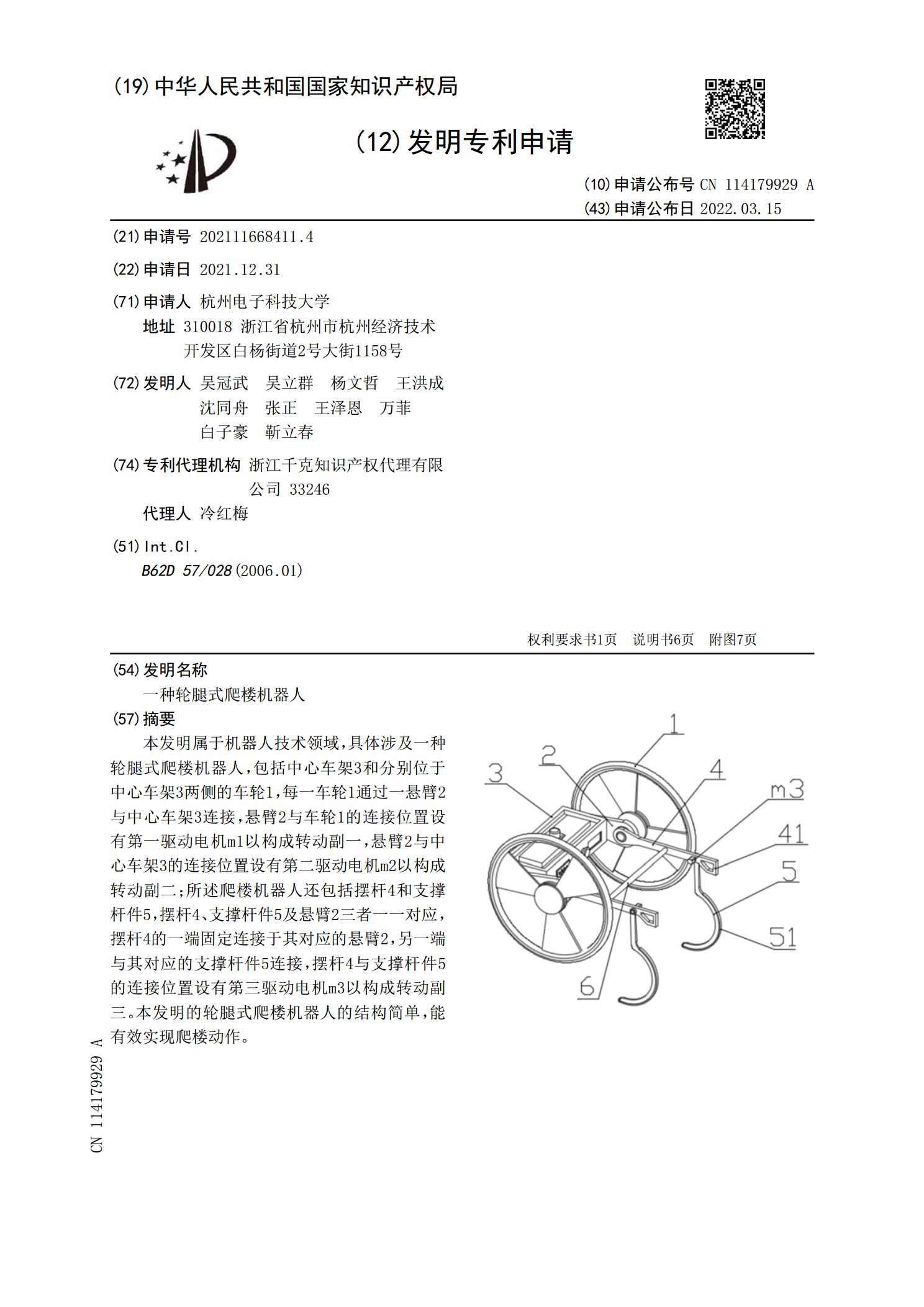
本发明属于机器人技术领域,具体涉及一种轮腿式爬楼机器人,包括中心车架3和分别位于中心车架3两侧的车轮1,每一车轮1通过一悬臂2与中心车架3连接,悬臂2与车轮1的连接位置设有第一驱动电机m1以构成转动副一,悬臂2与中心车架3的连接位置设有第二驱动电机m2以构成转动副二;所述爬楼机器人还包括摆杆4和支撑杆件5,摆杆4、支撑杆件5及悬臂2三者一一对应,摆杆4的一端固定连接于其对应的悬臂2,另一端与其对应的支撑杆件5连接,摆杆4与支撑杆件5的连接位置设有第三驱动电机m3以构成转动副三。本发明的轮腿式爬楼机器人的结
轮履复合式爬楼车轮.pdf
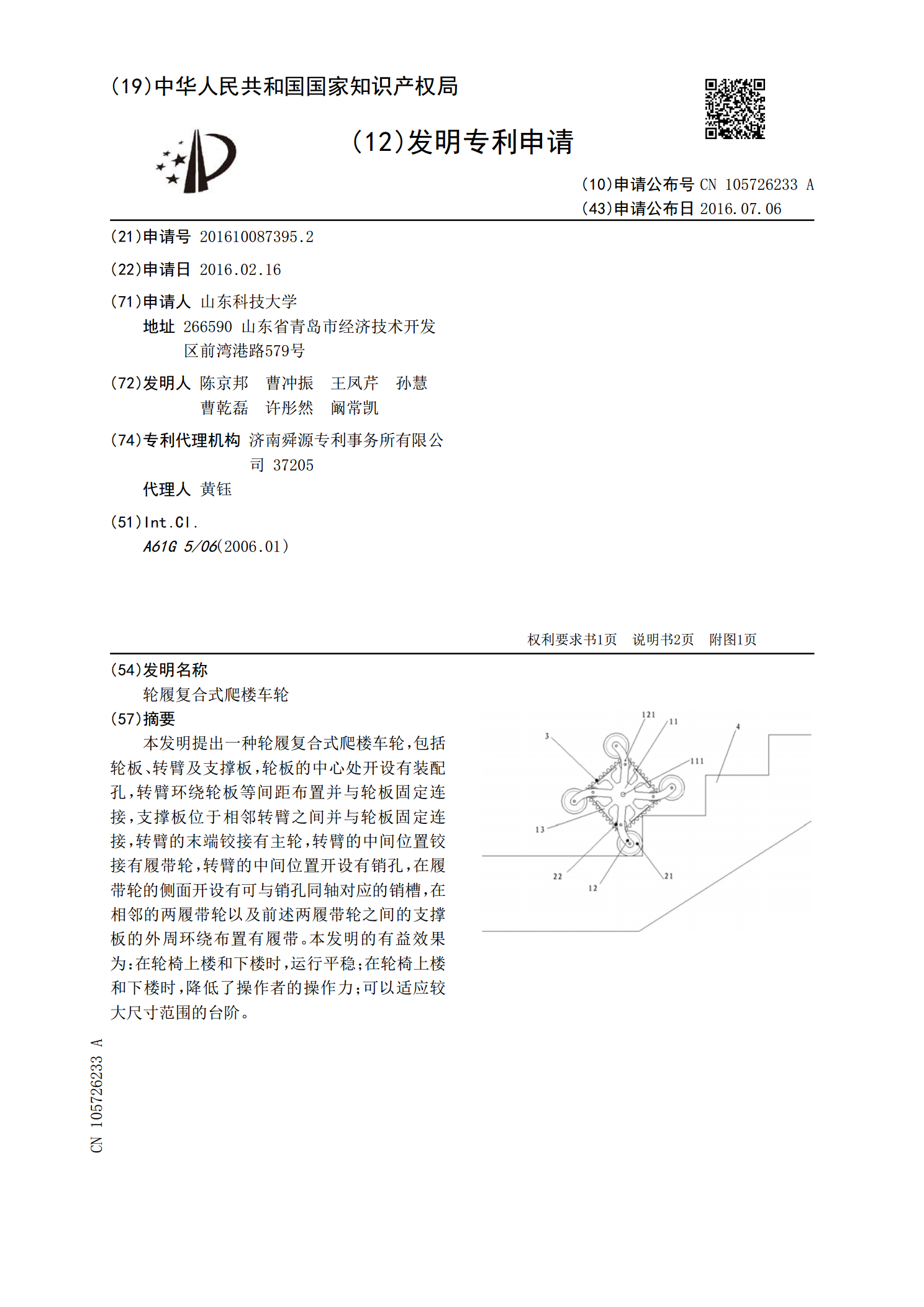
本发明提出一种轮履复合式爬楼车轮,包括轮板、转臂及支撑板,轮板的中心处开设有装配孔,转臂环绕轮板等间距布置并与轮板固定连接,支撑板位于相邻转臂之间并与轮板固定连接,转臂的末端铰接有主轮,转臂的中间位置铰接有履带轮,转臂的中间位置开设有销孔,在履带轮的侧面开设有可与销孔同轴对应的销槽,在相邻的两履带轮以及前述两履带轮之间的支撑板的外周环绕布置有履带。本发明的有益效果为:在轮椅上楼和下楼时,运行平稳;在轮椅上楼和下楼时,降低了操作者的操作力;可以适应较大尺寸范围的台阶。