
上装作业中汽车起重机底盘的姿态保持自动控制方法.pdf

猫巷****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
上装作业中汽车起重机底盘的姿态保持自动控制方法.pdf
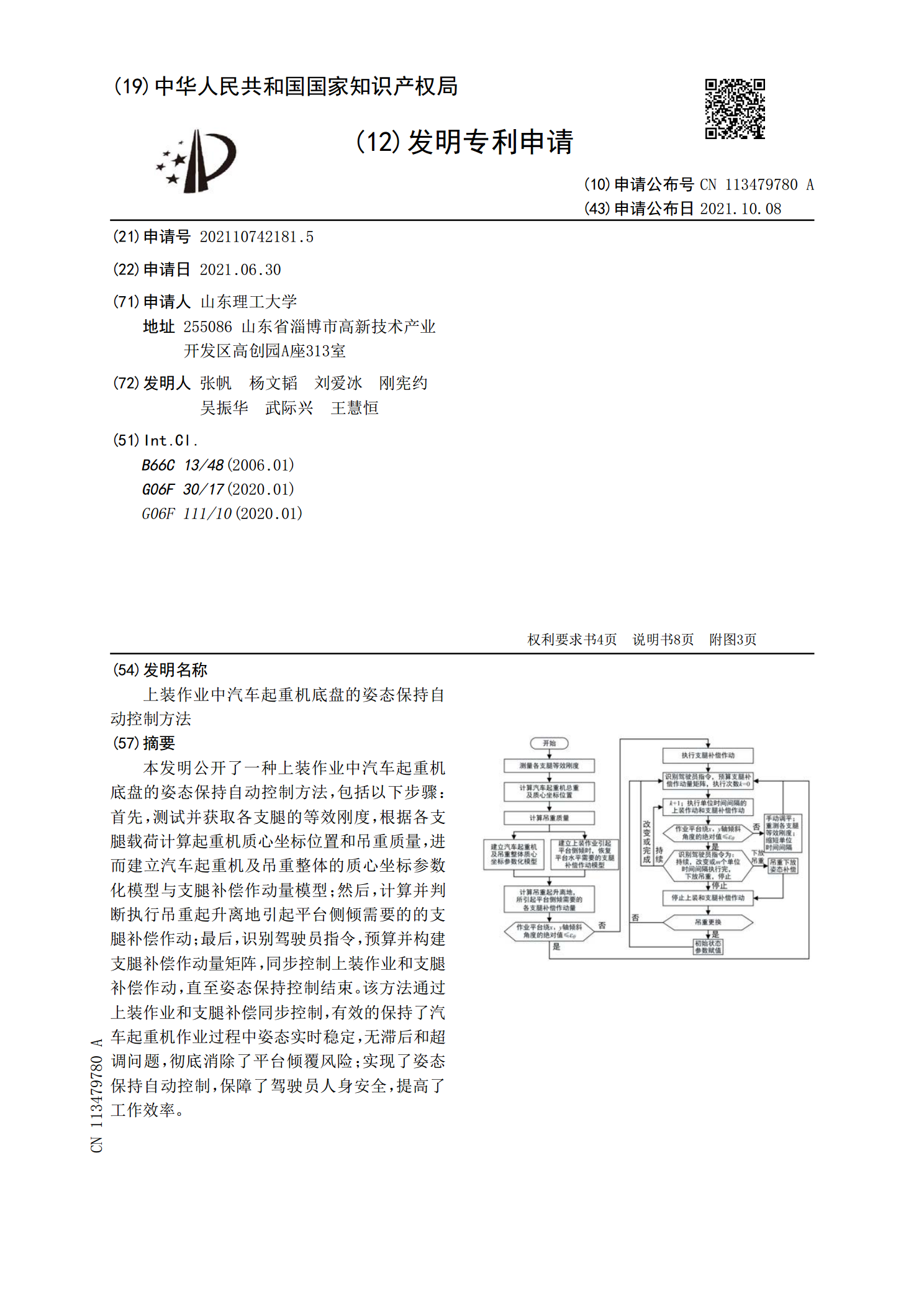
本发明公开了一种上装作业中汽车起重机底盘的姿态保持自动控制方法,包括以下步骤:首先,测试并获取各支腿的等效刚度,根据各支腿载荷计算起重机质心坐标位置和吊重质量,进而建立汽车起重机及吊重整体的质心坐标参数化模型与支腿补偿作动量模型;然后,计算并判断执行吊重起升离地引起平台侧倾需要的的支腿补偿作动;最后,识别驾驶员指令,预算并构建支腿补偿作动量矩阵,同步控制上装作业和支腿补偿作动,直至姿态保持控制结束。该方法通过上装作业和支腿补偿同步控制,有效的保持了汽车起重机作业过程中姿态实时稳定,无滞后和超调问题,彻底消
多点支撑平台的上装姿态控制方法.pdf
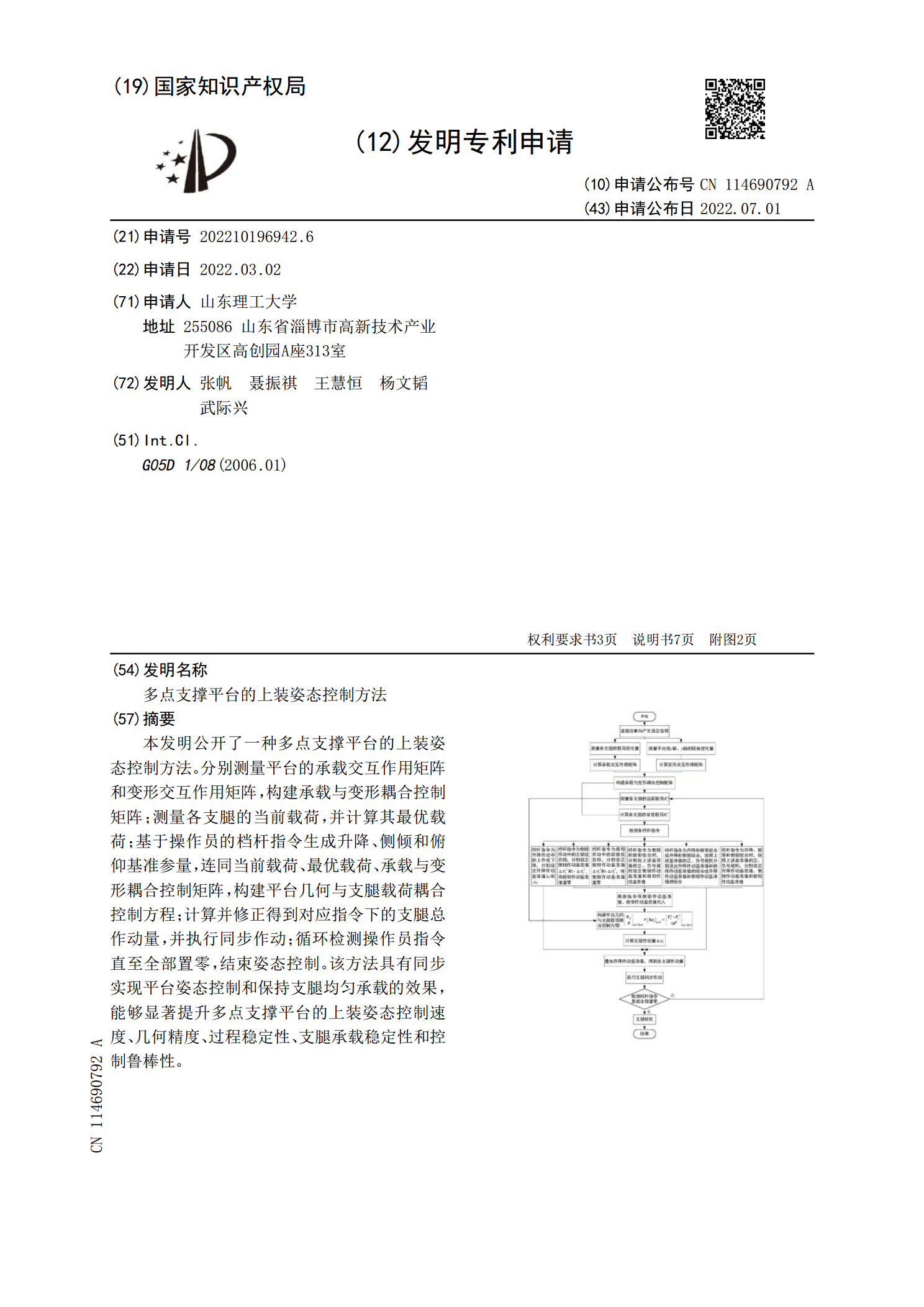
本发明公开了一种多点支撑平台的上装姿态控制方法。分别测量平台的承载交互作用矩阵和变形交互作用矩阵,构建承载与变形耦合控制矩阵;测量各支腿的当前载荷,并计算其最优载荷;基于操作员的档杆指令生成升降、侧倾和俯仰基准参量,连同当前载荷、最优载荷、承载与变形耦合控制矩阵,构建平台几何与支腿载荷耦合控制方程;计算并修正得到对应指令下的支腿总作动量,并执行同步作动;循环检测操作员指令直至全部置零,结束姿态控制。该方法具有同步实现平台姿态控制和保持支腿均匀承载的效果,能够显著提升多点支撑平台的上装姿态控制速度、几何精度

汽车起重机底盘.pptx
合用班级:起重机售后服务汽车型号旳编制规则起重机底盘主要技术参数概念术语起重机底盘旳构造及工作原理起重机底盘常规检验及调整起重机底盘故障分类起重机底盘常见故障旳诊疗与排除企业名称代号:辨认车辆制造企业旳代号三一汽车制造有限企业用“SYM”表达湖南汽车制造有限责任企业用“SYM”表达车辆类别代号产品序号动力性…………最高速度、最大爬坡度、加速性能经济性……燃油经济性(百公里油耗)、轮胎消耗制动性…………制动效能(制动距离和减速度)操纵稳定性……转向性能(不足转向)、车身侧倾角行驶舒适性……平顺性、车内噪声、

汽车起重机底盘课件.ppt
适用班级:起重机售后服务汽车型号的编制规则起重机底盘主要技术参数概念术语起重机底盘的构造及工作原理起重机底盘常规检查及调整起重机底盘故障分类起重机底盘常见故障的诊断与排除企业名称代号:识别车辆制造企业的代号三一汽车制造有限公司用“SYM”表示湖南汽车制造有限责任公司用“SYM”表示车辆类别代号产品序号动力性…………最高速度、最大爬坡度、加速性能经济性……燃油经济性(百公里油耗)、轮胎消耗制动性…………制动效能(制动距离和减速度)操纵稳定性……转向性能(不足转向)、车身侧倾角行驶舒适性……平顺性、车内噪声、
多点支撑平台的上装定点指向姿态控制方法.pdf
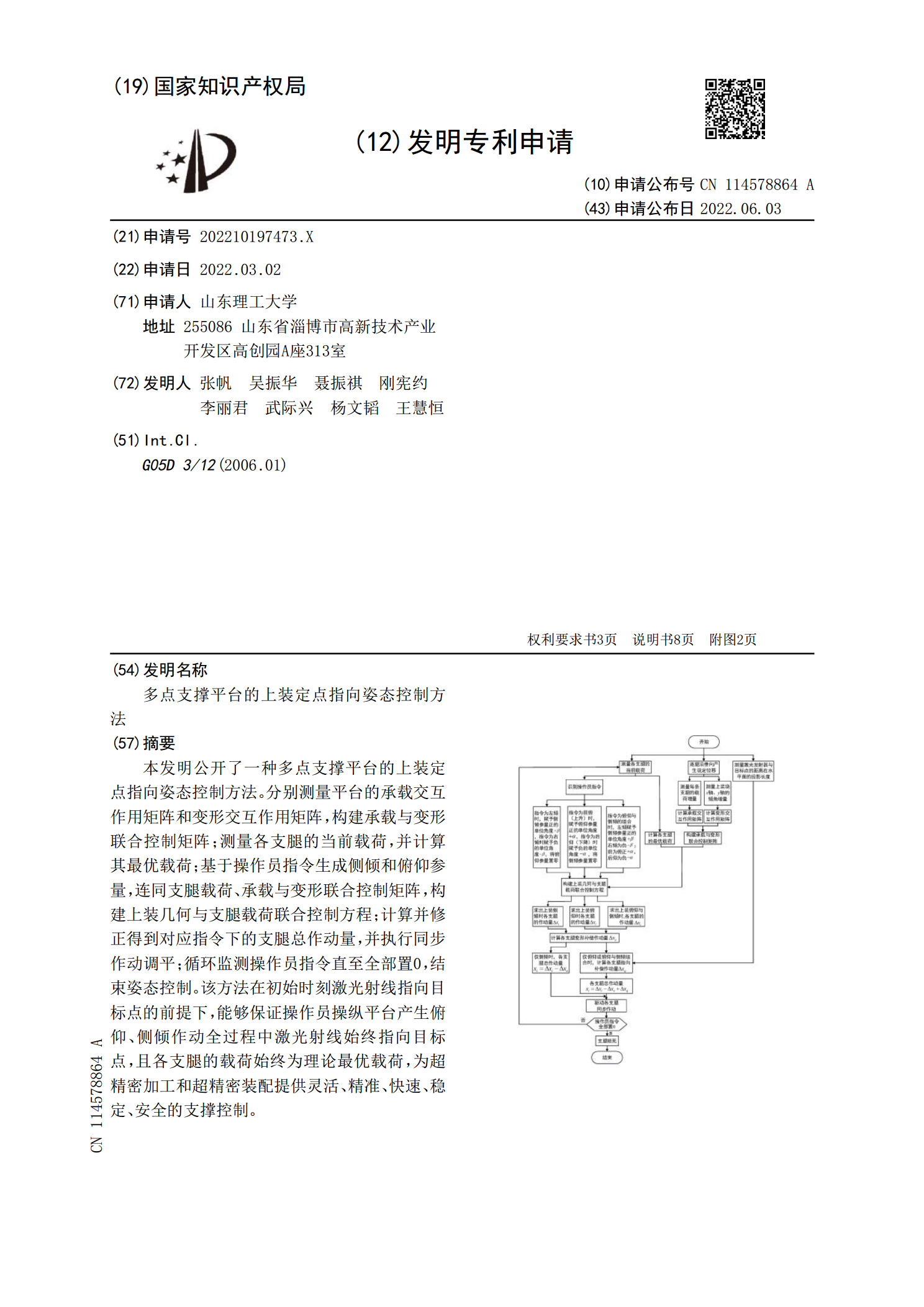
本发明公开了一种多点支撑平台的上装定点指向姿态控制方法。分别测量平台的承载交互作用矩阵和变形交互作用矩阵,构建承载与变形联合控制矩阵;测量各支腿的当前载荷,并计算其最优载荷;基于操作员指令生成侧倾和俯仰参量,连同支腿载荷、承载与变形联合控制矩阵,构建上装几何与支腿载荷联合控制方程;计算并修正得到对应指令下的支腿总作动量,并执行同步作动调平;循环监测操作员指令直至全部置0,结束姿态控制。该方法在初始时刻激光射线指向目标点的前提下,能够保证操作员操纵平台产生俯仰、侧倾作动全过程中激光射线始终指向目标点,且各支