
多点支撑平台的上装姿态控制方法.pdf

猫巷****觅蓉

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多点支撑平台的上装姿态控制方法.pdf
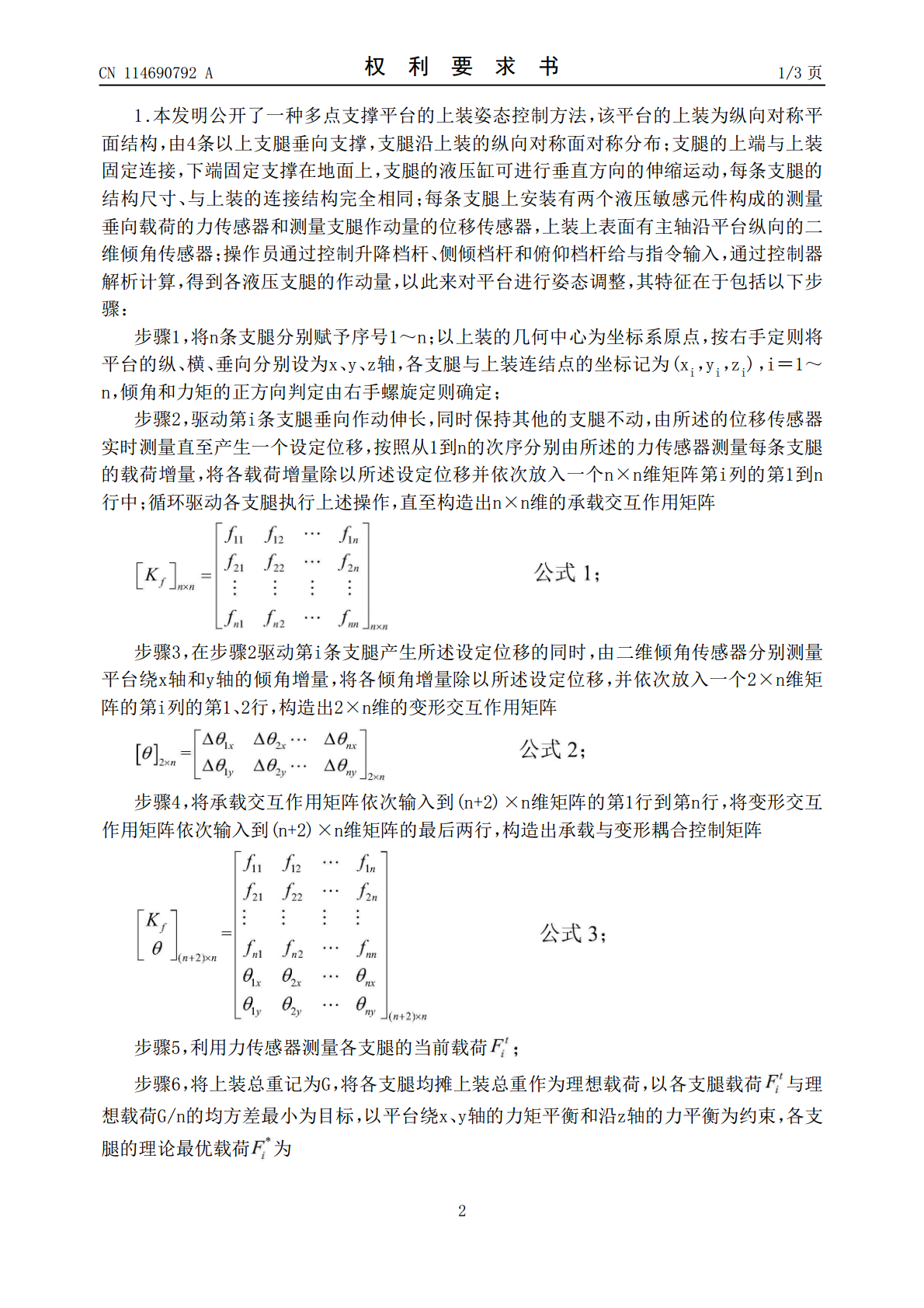
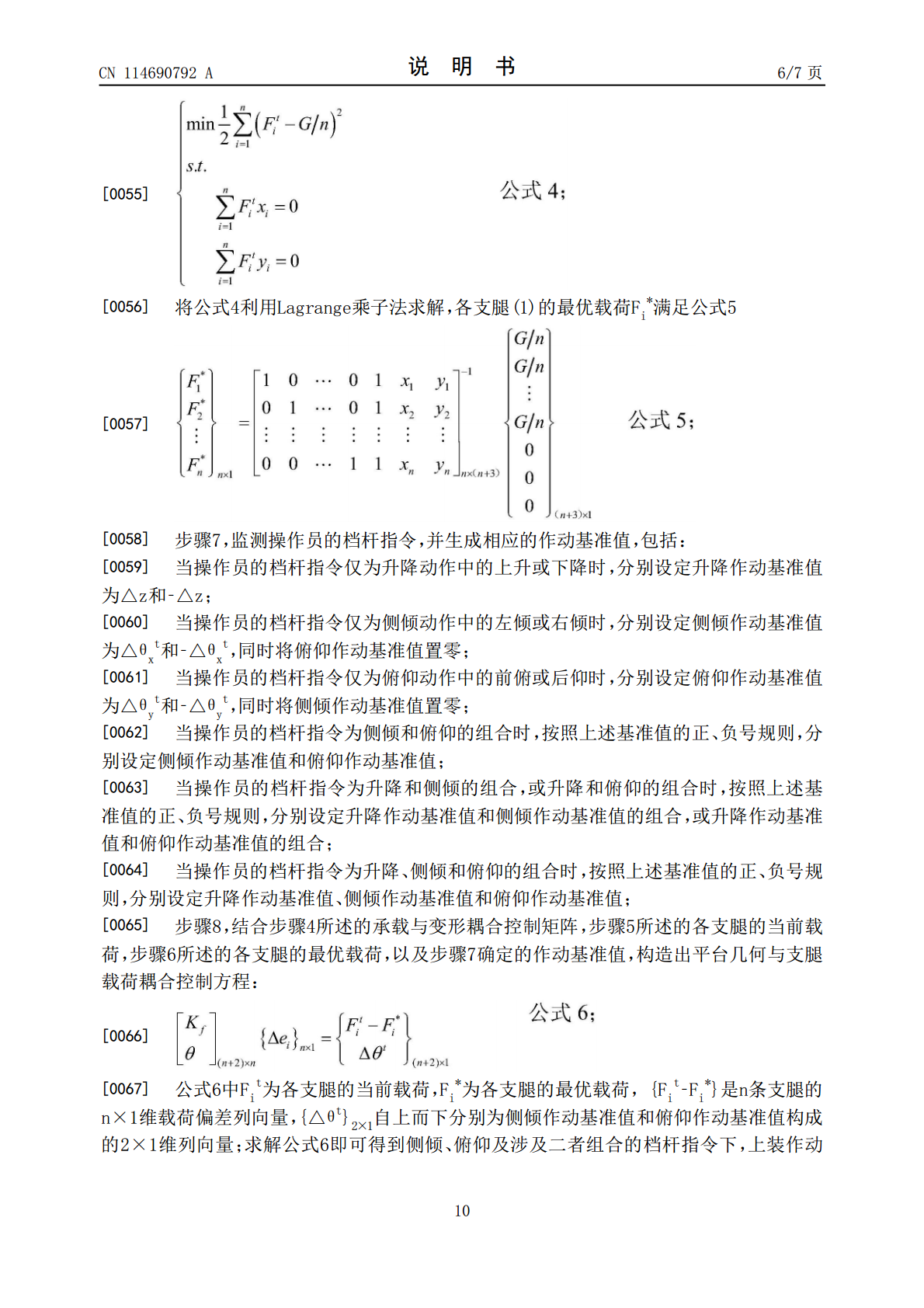
本发明公开了一种多点支撑平台的上装姿态控制方法。分别测量平台的承载交互作用矩阵和变形交互作用矩阵,构建承载与变形耦合控制矩阵;测量各支腿的当前载荷,并计算其最优载荷;基于操作员的档杆指令生成升降、侧倾和俯仰基准参量,连同当前载荷、最优载荷、承载与变形耦合控制矩阵,构建平台几何与支腿载荷耦合控制方程;计算并修正得到对应指令下的支腿总作动量,并执行同步作动;循环检测操作员指令直至全部置零,结束姿态控制。该方法具有同步实现平台姿态控制和保持支腿均匀承载的效果,能够显著提升多点支撑平台的上装姿态控制速度、几何精度
多点支撑平台的上装定点指向姿态控制方法.pdf
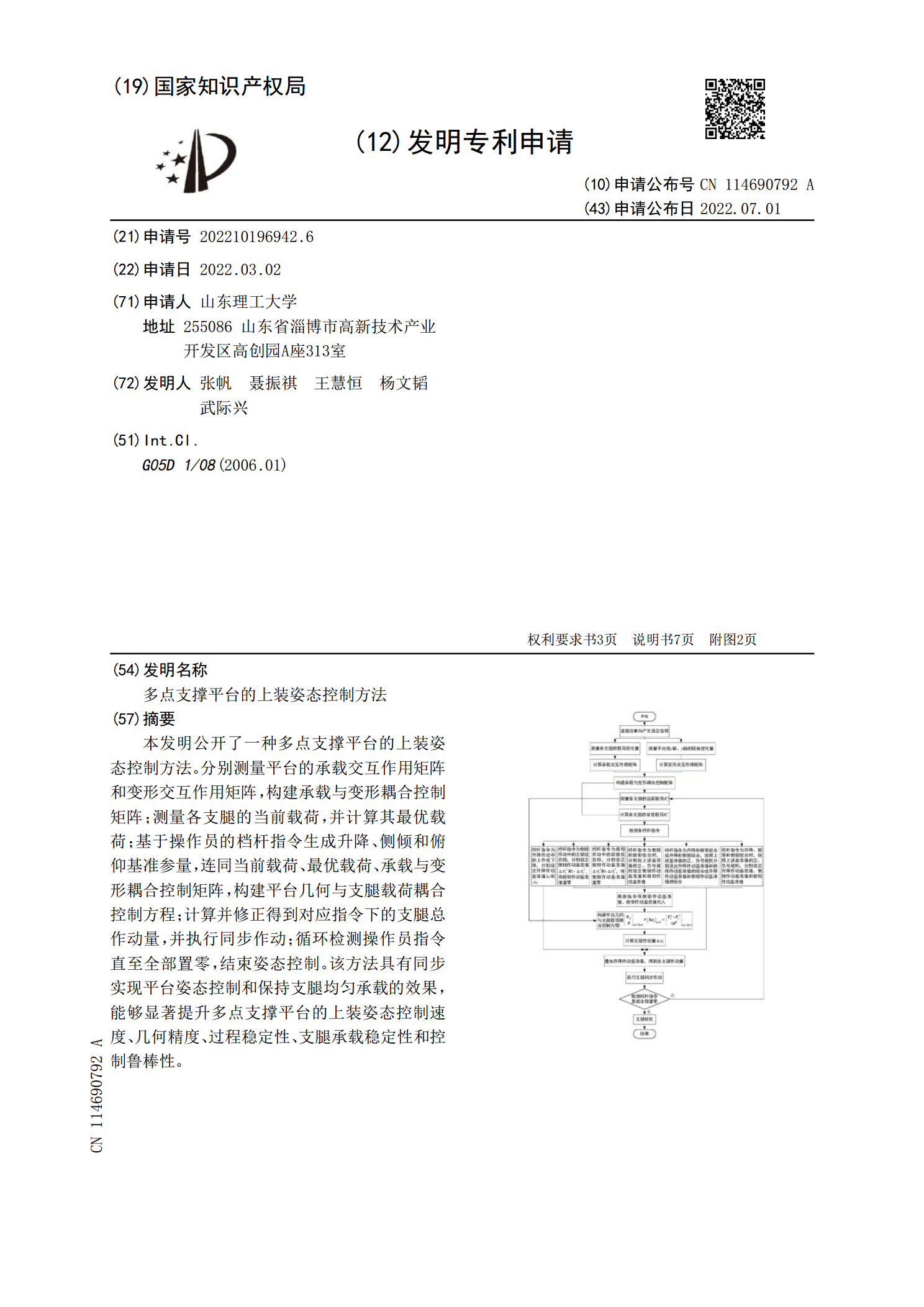
本发明公开了一种多点支撑平台的上装定点指向姿态控制方法。分别测量平台的承载交互作用矩阵和变形交互作用矩阵,构建承载与变形联合控制矩阵;测量各支腿的当前载荷,并计算其最优载荷;基于操作员指令生成侧倾和俯仰参量,连同支腿载荷、承载与变形联合控制矩阵,构建上装几何与支腿载荷联合控制方程;计算并修正得到对应指令下的支腿总作动量,并执行同步作动调平;循环监测操作员指令直至全部置0,结束姿态控制。该方法在初始时刻激光射线指向目标点的前提下,能够保证操作员操纵平台产生俯仰、侧倾作动全过程中激光射线始终指向目标点,且各支
一种多点支撑平台的调平控制方法.pdf
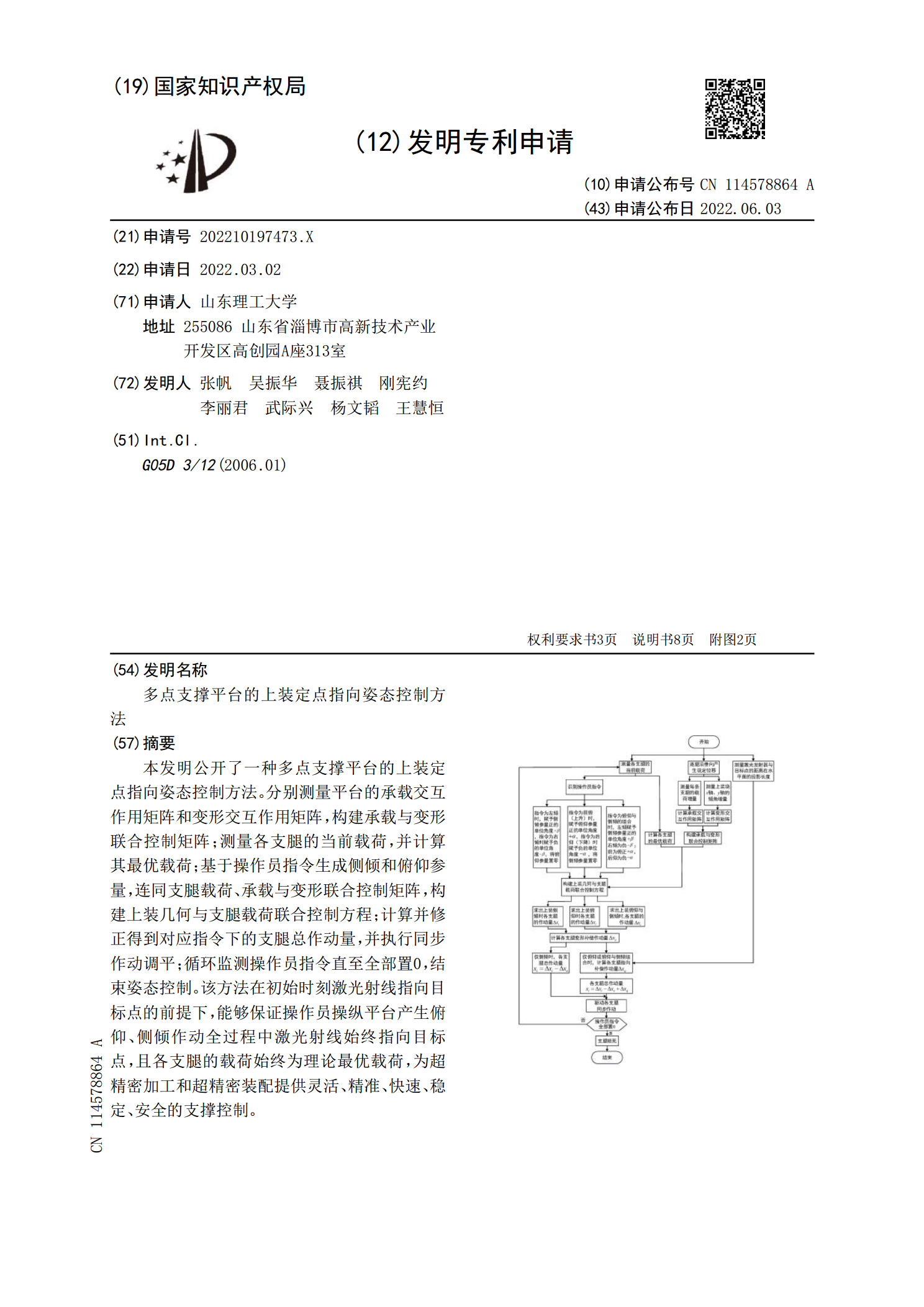
本发明公开了一种多点支撑平台的调平控制方法。分别测量并获取平台的承载交互作用矩阵和变形交互作用矩阵,构建承载与变形联合控制矩阵;计算各支腿的最优载荷,并测量其当前载荷,得到各支腿的载荷偏差率,结合平台的二维倾角判断是否需要调平;根据平台二维倾角、支腿载荷偏差、以及承载与变形联合控制矩阵,构建平台几何与支腿载荷联合控制方程,计算各支腿作动量,并执行同步调平;循环判断支腿的载荷偏差率与平台的二维倾角,并执行作动控制,直至达到调平目标;该方法具有同步实现平台几何调平和支腿载荷控制的能力,能够显著提升多点支撑平台
一种多点柔性支撑平台调整水平的方法及装置.pdf
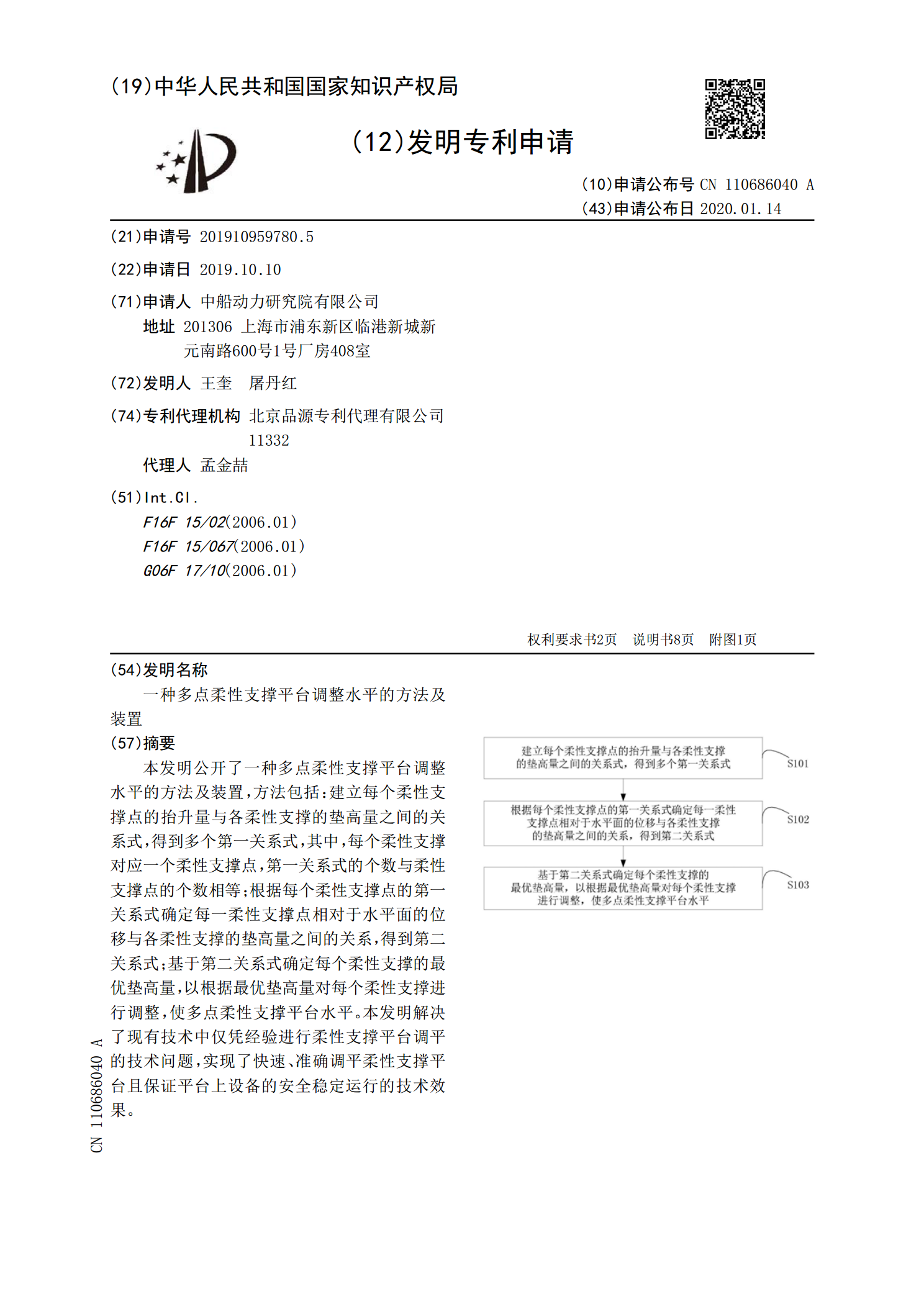
本发明公开了一种多点柔性支撑平台调整水平的方法及装置,方法包括:建立每个柔性支撑点的抬升量与各柔性支撑的垫高量之间的关系式,得到多个第一关系式,其中,每个柔性支撑对应一个柔性支撑点,第一关系式的个数与柔性支撑点的个数相等;根据每个柔性支撑点的第一关系式确定每一柔性支撑点相对于水平面的位移与各柔性支撑的垫高量之间的关系,得到第二关系式;基于第二关系式确定每个柔性支撑的最优垫高量,以根据最优垫高量对每个柔性支撑进行调整,使多点柔性支撑平台水平。本发明解决了现有技术中仅凭经验进行柔性支撑平台调平的技术问题,实现

数控旋风铣床上工件多点支撑的控制方法.docx
数控旋风铣床上工件多点支撑的控制方法摘要:数控旋风铣床是一种高精度、高效率的加工设备,在不同的产业及领域都有广泛的应用。为了提高加工精度和加工效率,工件在旋风铣床上需要实现多点支撑,解决因单点支撑而引起的加工误差问题。本文将介绍数控旋风铣床上工件多点支撑的控制方法。关键词:数控旋风铣床;多点支撑;加工误差;控制方法一、引言数控旋风铣床是一种先进的加工设备,具有高精度、高效率的特点,广泛应用于机械加工、航空航天、汽车零部件等领域。在加工过程中,由于工件结构的复杂性以及加工过程中的振动等因素,导致工件容易出现