
用于起重设备的控制方法、控制器、控制装置和起重设备.pdf

琰琬****买买


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于起重设备的控制方法、控制器、控制装置和起重设备.pdf
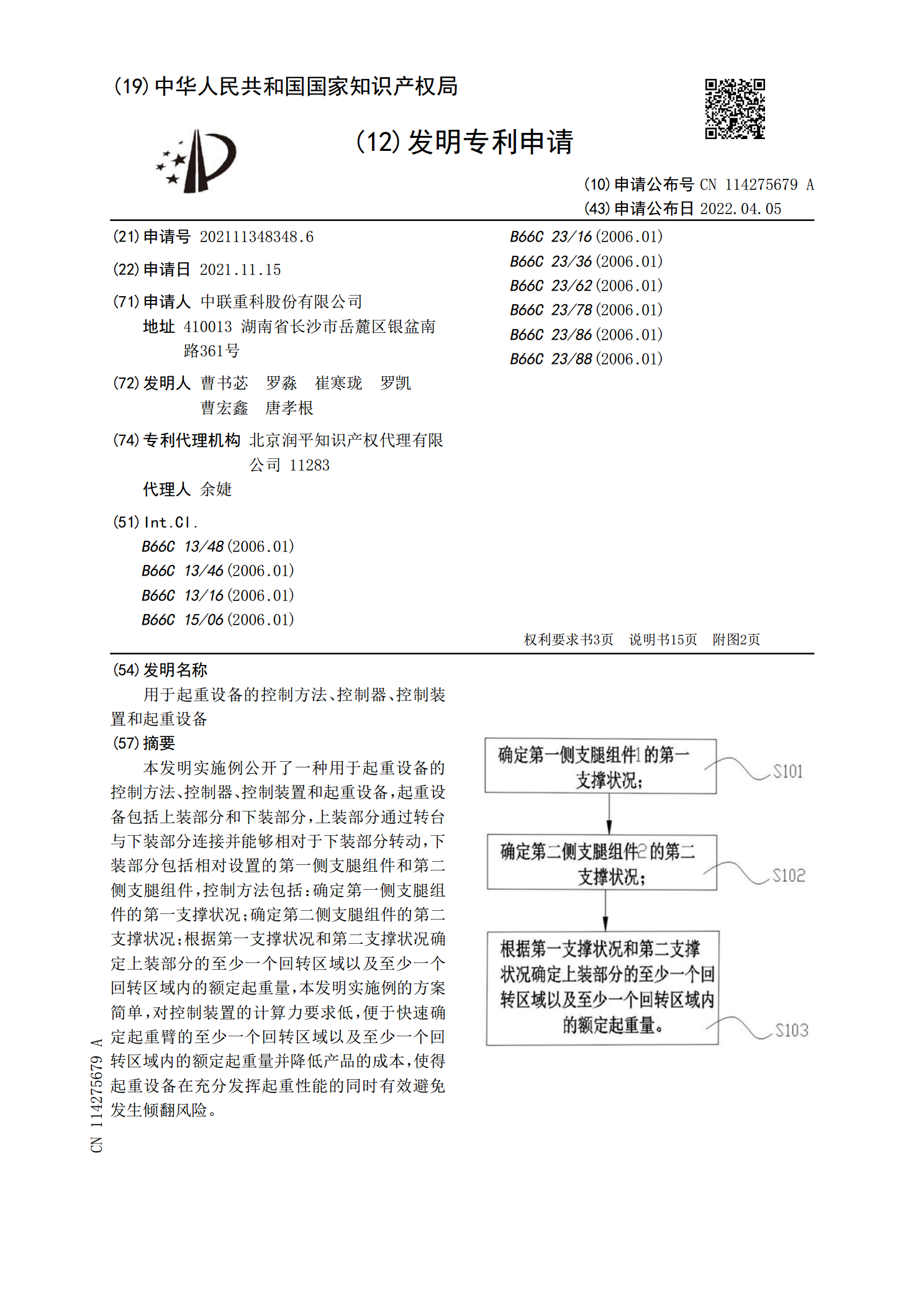
本发明实施例公开了一种用于起重设备的控制方法、控制器、控制装置和起重设备,起重设备包括上装部分和下装部分,上装部分通过转台与下装部分连接并能够相对于下装部分转动,下装部分包括相对设置的第一侧支腿组件和第二侧支腿组件,控制方法包括:确定第一侧支腿组件的第一支撑状况;确定第二侧支腿组件的第二支撑状况;根据第一支撑状况和第二支撑状况确定上装部分的至少一个回转区域以及至少一个回转区域内的额定起重量,本发明实施例的方案简单,对控制装置的计算力要求低,便于快速确定起重臂的至少一个回转区域以及至少一个回转区域内的额定起
用于起重机防摇控制的方法、控制器、装置及起重机.pdf
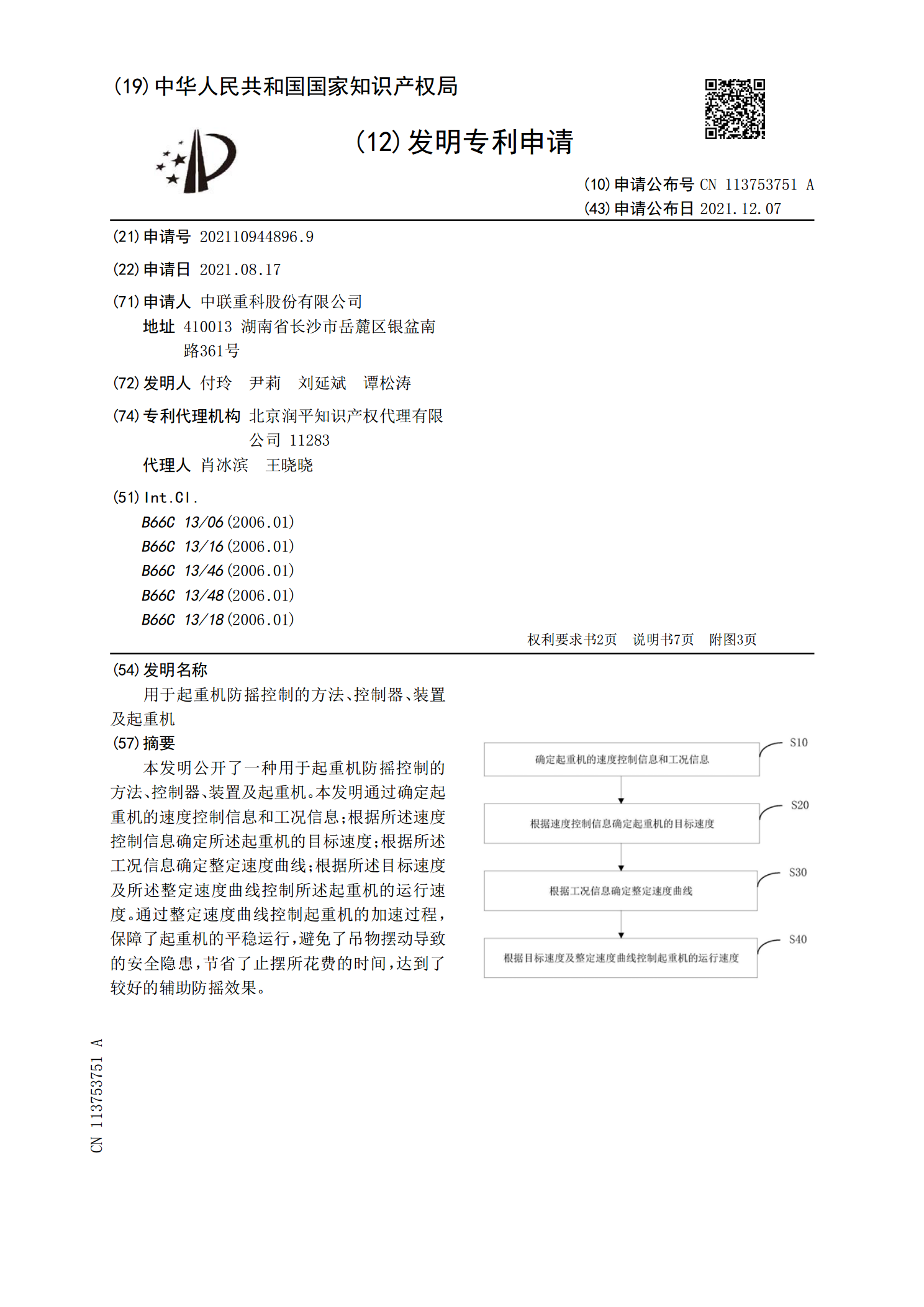
本发明公开了一种用于起重机防摇控制的方法、控制器、装置及起重机。本发明通过确定起重机的速度控制信息和工况信息;根据所述速度控制信息确定所述起重机的目标速度;根据所述工况信息确定整定速度曲线;根据所述目标速度及所述整定速度曲线控制所述起重机的运行速度。通过整定速度曲线控制起重机的加速过程,保障了起重机的平稳运行,避免了吊物摆动导致的安全隐患,节省了止摆所花费的时间,达到了较好的辅助防摇效果。

起重机控制器、起重机及用于控制起重机的方法.pdf
本发明涉及用于起重机的起重机控制器、起重机及用于控制起重机的方法,起重机包括用于提升悬挂在缆绳上的负载的提升齿轮,其具有:主动升降补偿件,通过致动提升齿轮而至少部分地补偿由于升降导致的缆绳悬挂点和/或负载堆积点的移动;和操作员控制件,参考操作员的指定而致动提升齿轮,其中,提升齿轮的至少一个运动学约束量的分割可在升降补偿件与操作员控制件之间调节。

起重机支腿控制方法、装置、控制器和起重机.pdf
本申请涉及一种起重机支腿控制方法、装置、控制器和起重机。所述方法包括:响应于操作人员在人机交互设备上进行的触发操作,生成对应的控制指令;其中,人机交互设备设置于起重机驾驶室内,人机交互设备包括显示屏;将控制指令发送至动力设备,以使动力设备驱动支腿动作;获取各支腿的当前状态参数并通过人机交互设备进行显示。通过上述方案,基于设置于起重机驾驶室内的人机交互设备,操作者可以在起重机驾驶室内对起重机支腿进行控制,不易受到外界恶劣环境的影响,从而提高操作者的控制体验;并且,相对于遥控器进行控制,也不会出现线路缠绕的问

用于起重设备的自锁控制装置.pdf
本发明涉及用于起重设备的自锁控制装置,其解决的技术方案是:包括固定外圈、内圈和盘形凸轮,内圈的外缘面上设有圆周凹槽,圆周凹槽的端面铰接有多个楔块,楔块的铰接部装有扭簧,扭簧的一端与内圈连接,另一端与楔块连接;盘形凸轮的外缘面由多个均布的凸出部和平滑部依次平滑连接构成,凸出部与内圈的内缘面接触,圆周凹槽的槽底有多个沿内圈的径向设置的通槽,楔块的另一端置于通槽内;通槽内装有滑块,滑块的一端与盘形凸轮的平滑部接触,滑块的另一端与楔块的另一端之间有间隙;盘形凸轮上装有输入轴,内圈上装有输出轴,输入轴与输出轴之间装