
伸缩臂机械设备控制装置、控制方法及伸缩臂机械设备.pdf

葫芦****io


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

伸缩臂机械设备控制装置、控制方法及伸缩臂机械设备.pdf
本申请公开了一种伸缩臂机械设备控制装置、控制方法及伸缩臂机械设备。该控制装置包括:角度传感器,获取伸缩臂机械设备的臂架的角度;浮动锁止机构,设置于伸缩臂机械设备的车桥上,用于锁止车桥;支腿控制机构,控制伸缩臂机械设备的支腿的张开与收回;控制器,在伸缩臂机械设备处于作业工况下,获取伸缩臂机械设备的臂架角度;根据臂架角度控制浮动锁止机构或支腿控制机构以使伸缩臂机械设备处于稳定状态。本申请通过角度传感器获取伸缩臂机械设备的臂架角度;根据臂架角度控制浮动锁止机构或支腿控制机构以使伸缩臂机械设备处于稳定状态。满足了
一种伸缩臂的安全控制方法、装置及伸缩臂叉车.pdf
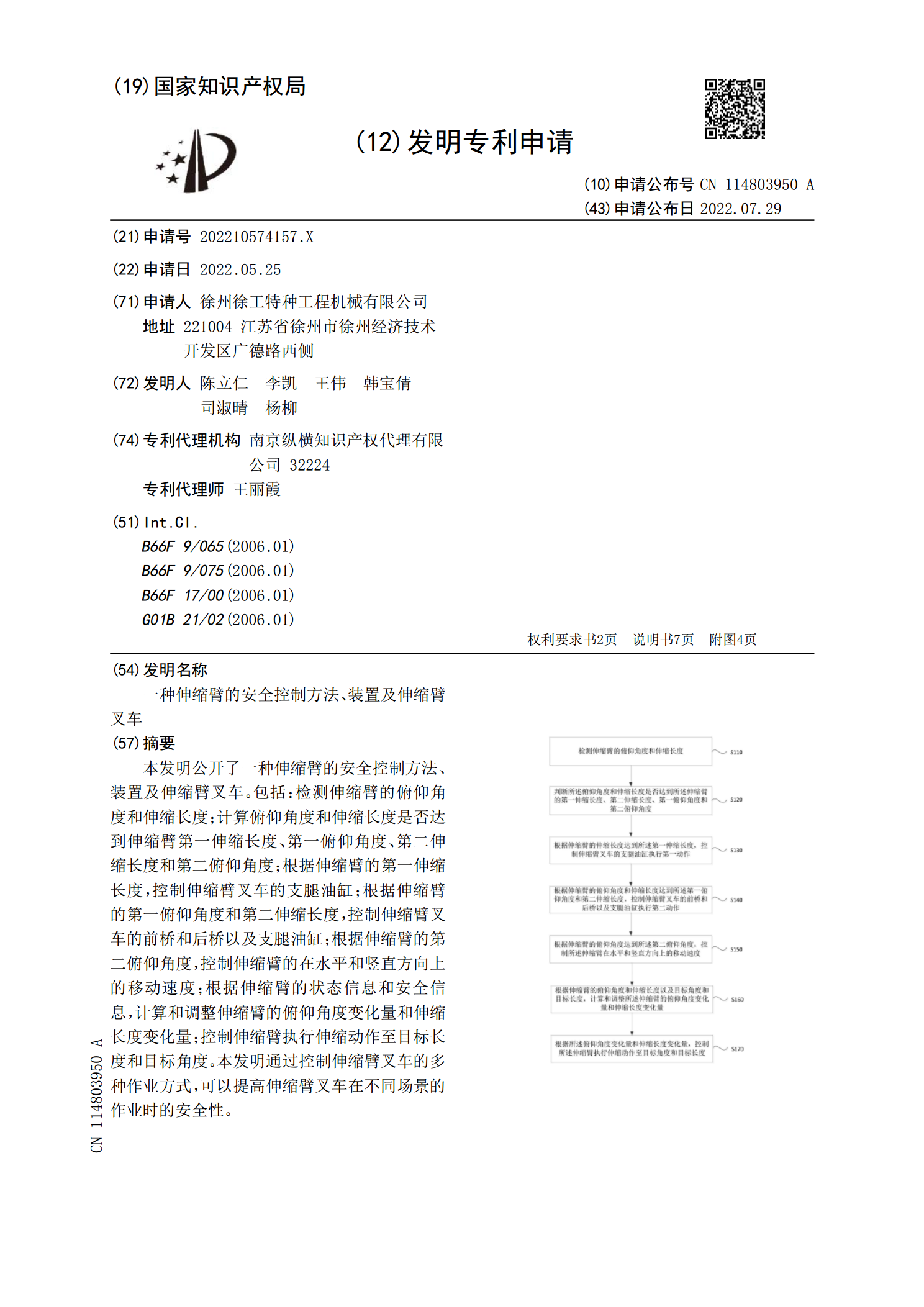
本发明公开了一种伸缩臂的安全控制方法、装置及伸缩臂叉车。包括:检测伸缩臂的俯仰角度和伸缩长度;计算俯仰角度和伸缩长度是否达到伸缩臂第一伸缩长度、第一俯仰角度、第二伸缩长度和第二俯仰角度;根据伸缩臂的第一伸缩长度,控制伸缩臂叉车的支腿油缸;根据伸缩臂的第一俯仰角度和第二伸缩长度,控制伸缩臂叉车的前桥和后桥以及支腿油缸;根据伸缩臂的第二俯仰角度,控制伸缩臂的在水平和竖直方向上的移动速度;根据伸缩臂的状态信息和安全信息,计算和调整伸缩臂的俯仰角度变化量和伸缩长度变化量;控制伸缩臂执行伸缩动作至目标长度和目标角度
伸缩臂的伸缩装置.pdf
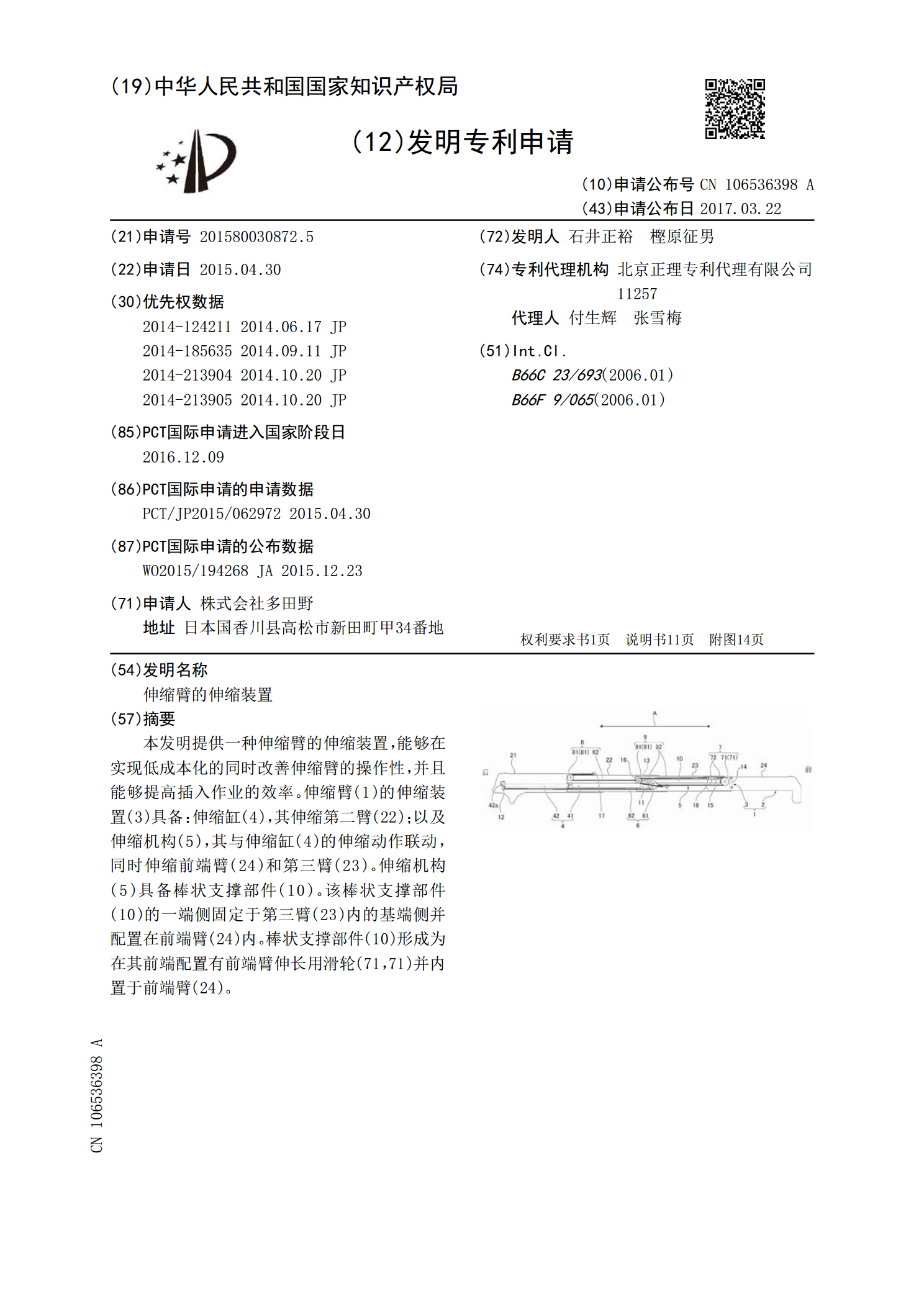
本发明提供一种伸缩臂的伸缩装置,能够在实现低成本化的同时改善伸缩臂的操作性,并且能够提高插入作业的效率。伸缩臂(1)的伸缩装置(3)具备:伸缩缸(4),其伸缩第二臂(22);以及伸缩机构(5),其与伸缩缸(4)的伸缩动作联动,同时伸缩前端臂(24)和第三臂(23)。伸缩机构(5)具备棒状支撑部件(10)。该棒状支撑部件(10)的一端侧固定于第三臂(23)内的基端侧并配置在前端臂(24)内。棒状支撑部件(10)形成为在其前端配置有前端臂伸长用滑轮(71,71)并内置于前端臂(24)。
伸缩臂的伸缩装置.pdf
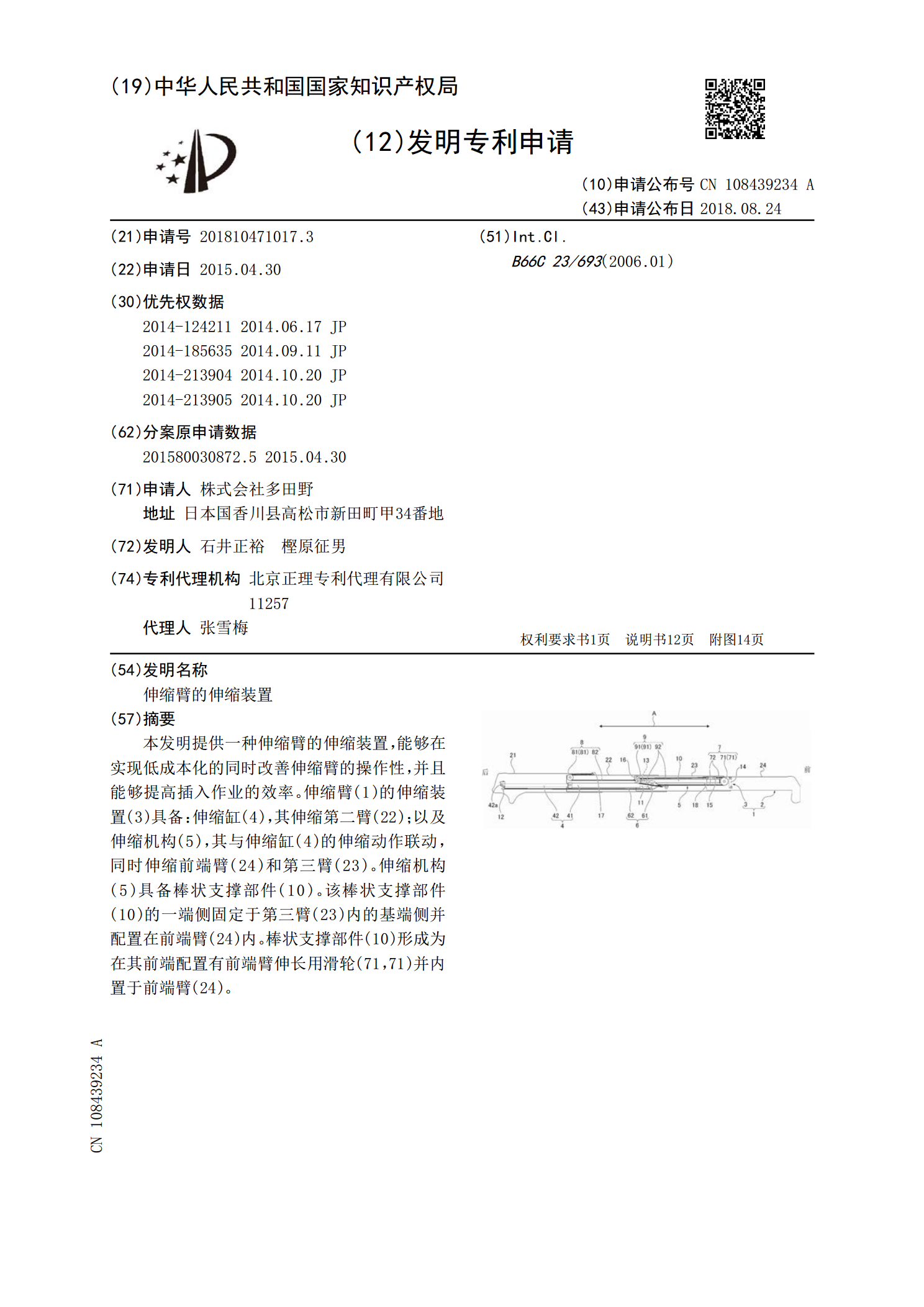
本发明提供一种伸缩臂的伸缩装置,能够在实现低成本化的同时改善伸缩臂的操作性,并且能够提高插入作业的效率。伸缩臂(1)的伸缩装置(3)具备:伸缩缸(4),其伸缩第二臂(22);以及伸缩机构(5),其与伸缩缸(4)的伸缩动作联动,同时伸缩前端臂(24)和第三臂(23)。伸缩机构(5)具备棒状支撑部件(10)。该棒状支撑部件(10)的一端侧固定于第三臂(23)内的基端侧并配置在前端臂(24)内。棒状支撑部件(10)形成为在其前端配置有前端臂伸长用滑轮(71,71)并内置于前端臂(24)。
掘进机截割臂伸缩控制方法及装置.pdf
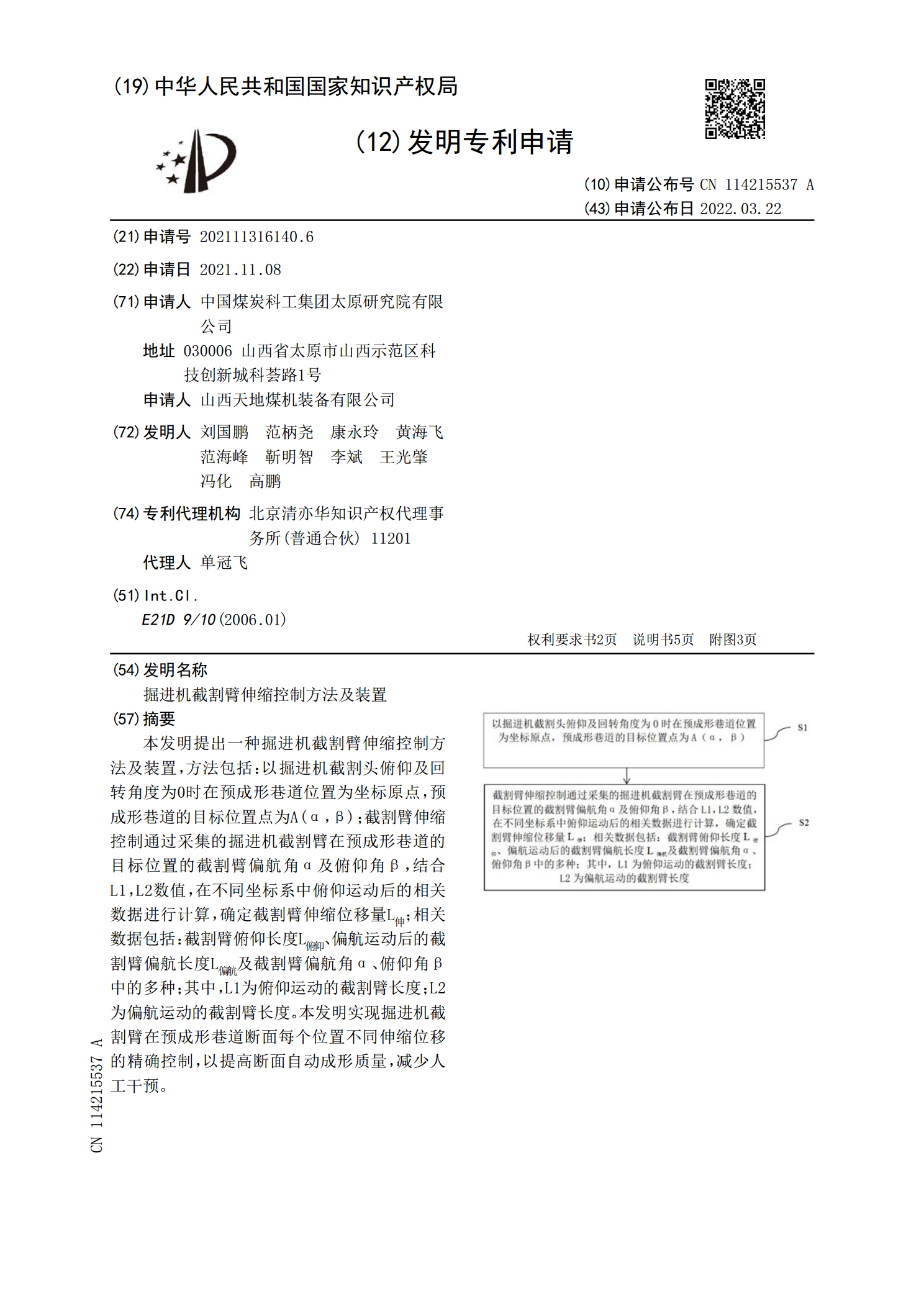
本发明提出一种掘进机截割臂伸缩控制方法及装置,方法包括:以掘进机截割头俯仰及回转角度为0时在预成形巷道位置为坐标原点,预成形巷道的目标位置点为A(α,β);截割臂伸缩控制通过采集的掘进机截割臂在预成形巷道的目标位置的截割臂偏航角α及俯仰角β,结合L1,L2数值,在不同坐标系中俯仰运动后的相关数据进行计算,确定截割臂伸缩位移量L