
用于激光SLAM导航AGV的货架及智能仓储系统.pdf

小琛****82

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于激光SLAM导航AGV的货架及智能仓储系统.pdf
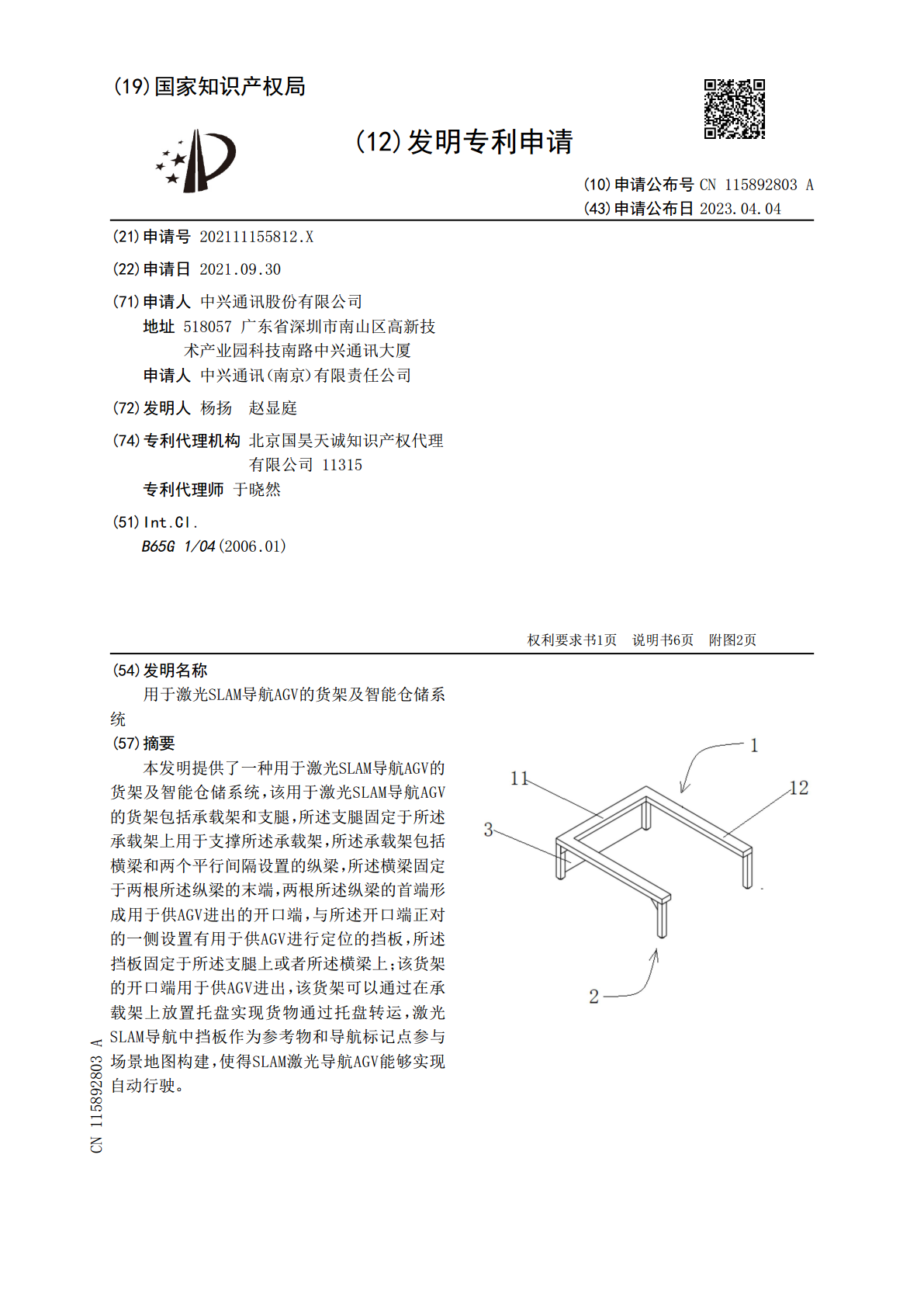
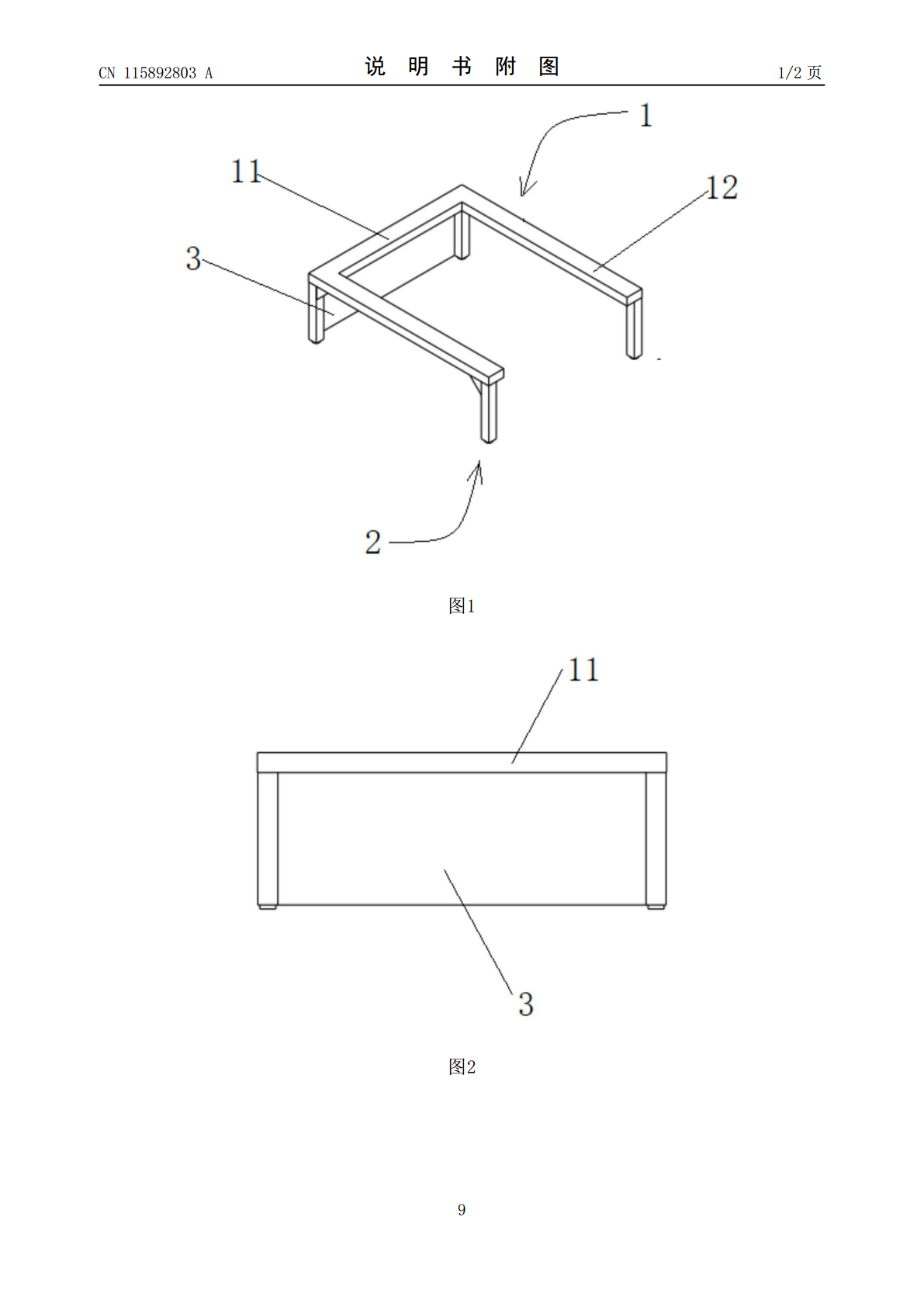
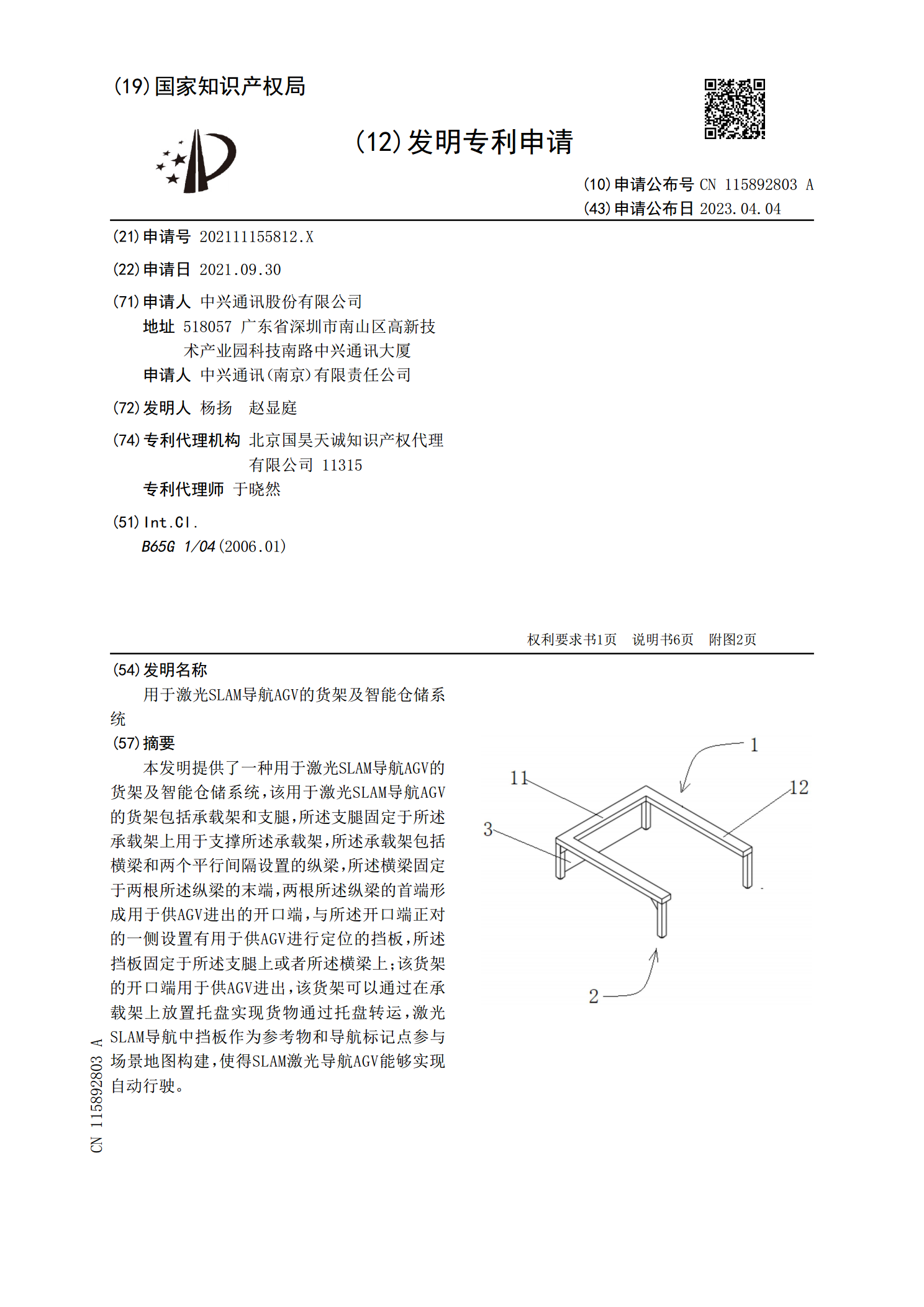
本发明提供了一种用于激光SLAM导航AGV的货架及智能仓储系统,该用于激光SLAM导航AGV的货架包括承载架和支腿,所述支腿固定于所述承载架上用于支撑所述承载架,所述承载架包括横梁和两个平行间隔设置的纵梁,所述横梁固定于两根所述纵梁的末端,两根所述纵梁的首端形成用于供AGV进出的开口端,与所述开口端正对的一侧设置有用于供AGV进行定位的挡板,所述挡板固定于所述支腿上或者所述横梁上;该货架的开口端用于供AGV进出,该货架可以通过在承载架上放置托盘实现货物通过托盘转运,激光SLAM导航中挡板作为参考物和导航标

激光导航AGV叉车在物资仓储管理中的应用.pptx
添加副标题目录PART01PART02定义和功能工作原理和特点应用领域和发展趋势PART03物资仓储管理的意义和重要性传统仓储管理的局限性和挑战物资仓储管理的新需求和趋势PART04提高仓储效率和管理水平降低人工成本和操作风险实现智能化和自动化的仓储管理提升仓储管理的灵活性和适应性PART05自动化存取和搬运智能调度和路径规划实时监控和安全保障数据分析和服务优化PART06案例一:某大型电商仓库的应用案例二:某机械制造企业仓库的应用案例三:某物流配送中心的应用案例分析和启示PART07激光导航AGV叉车技

背负式激光导航AGV.pdf
本发明公开一种背负式激光导航AGV,包括有车体、控制面板、电源、激光导航装置、驱动装置、电子防撞装置、机械防撞装置;该控制面板为两个,其分别设置在车体的前后侧面上;该电源设置在车体的内部中间位置处并与控制面板连接;该激光导航装置设置于车体的前端面并与控制面板连接;该驱动装置设置于车体的内部中间位置处并位于电源的下方,驱动装置与控制面板连接并带动主动轮转动;该电子防撞装置设置于车体的前端面并与控制面板连接;该机械防撞装置为两个,其分别设置于车体的前后两端面,且与控制面板连接。通过将电源和驱动装置设置于车体的

基于智能仓储的AGV道路识别系统.docx
基于智能仓储的AGV道路识别系统基于智能仓储的AGV道路识别系统摘要:随着物流行业的不断发展,自动化物流设备在现代仓储系统中发挥着越来越重要的作用。其中,自动导引车(AutomatedGuidedVehicle,AGV)作为一种智能的仓储设备,广泛应用于仓库、工厂和分拣中心等场景。AGV的道路识别系统是保证其安全、高效运行的关键技术之一。本论文将介绍基于智能仓储的AGV道路识别系统的原理、功能以及应用前景,旨在为相关行业提供参考和借鉴。一、引言自动导引车(AGV)是一种通过自动化技术、位置感知和路径规划等

基于智能仓储的AGV道路识别系统.pptx
汇报人:/目录01智能仓储系统的定义和功能智能仓储系统的应用场景和发展趋势02AGV道路识别系统的基本原理AGV道路识别系统在智能仓储中的作用03图像采集和处理技术道路特征提取和识别算法路径规划和导航控制技术04AGV道路识别系统的优势AGV道路识别系统面临的挑战AGV道路识别系统的未来发展方向05案例一:某电商仓库的AGV道路识别系统应用案例二:某制造企业生产线上的AGV道路识别系统应用案例三:某大型物流中心的AGV道路识别系统应用06基于智能仓储的AGV道路识别系统的总结基于智能仓储的AGV道路识别系