
一种基于ENet改进的轻量实时车道线分割方法.pdf

玄静****写意

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于ENet改进的轻量实时车道线分割方法.pdf
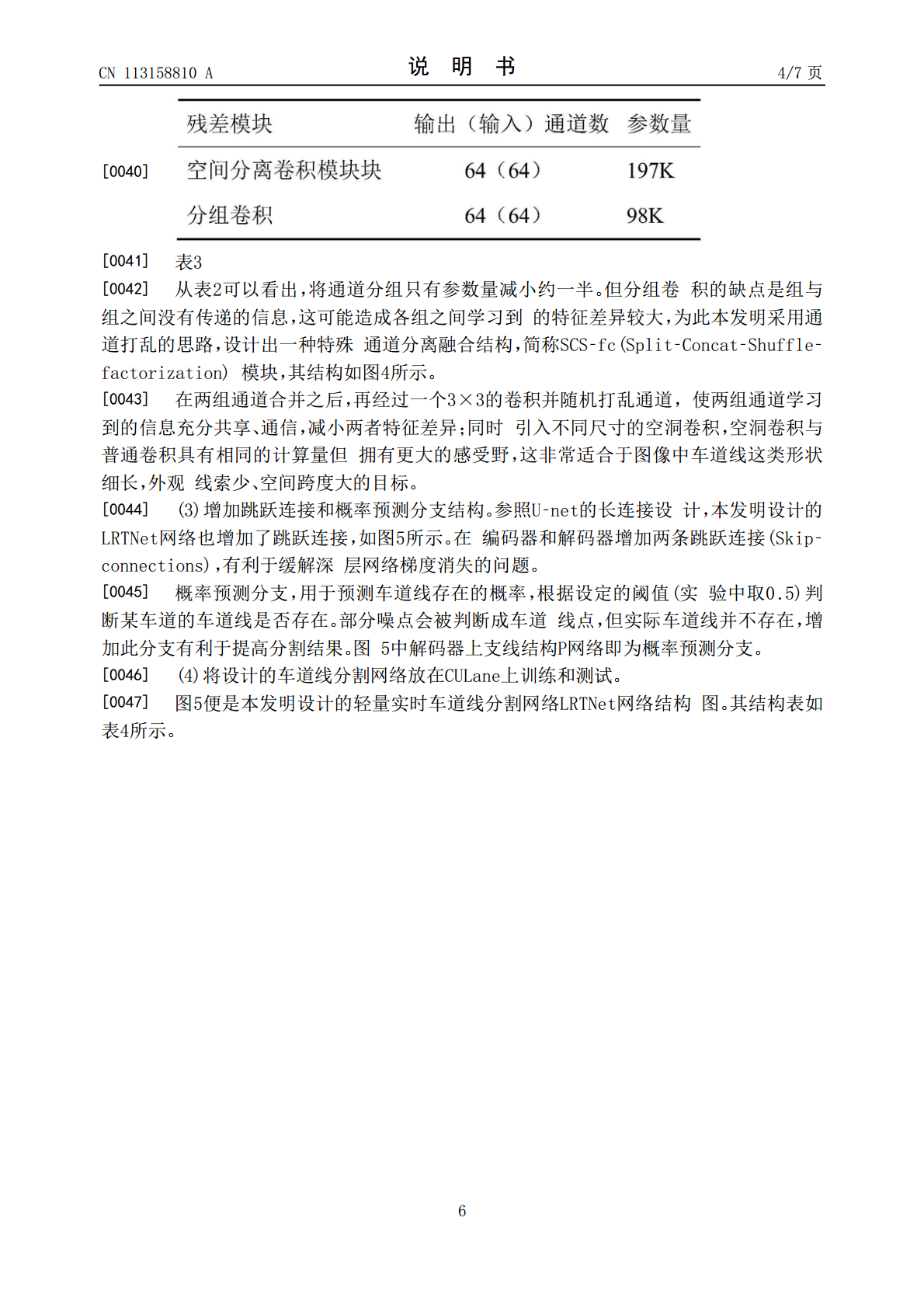
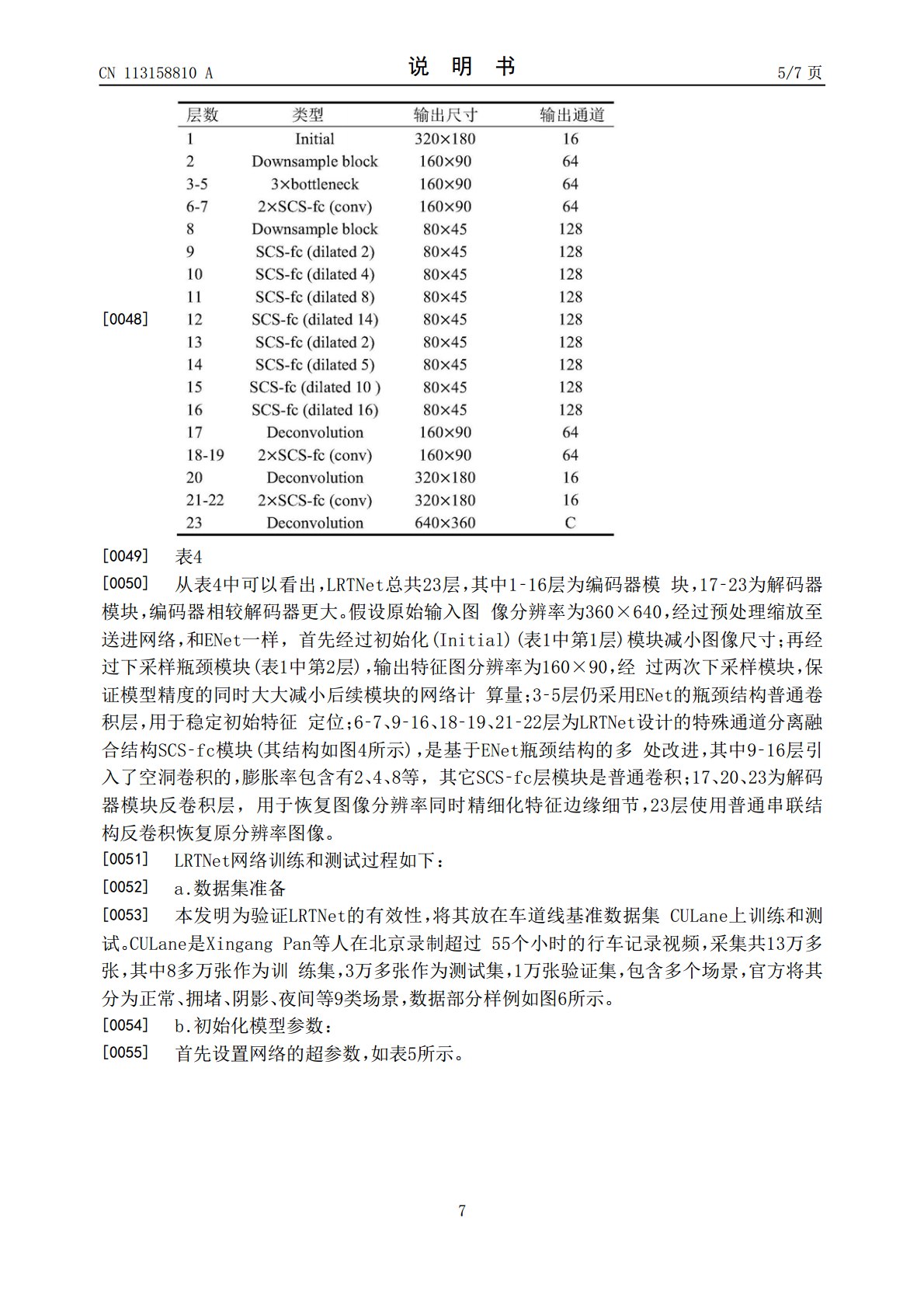
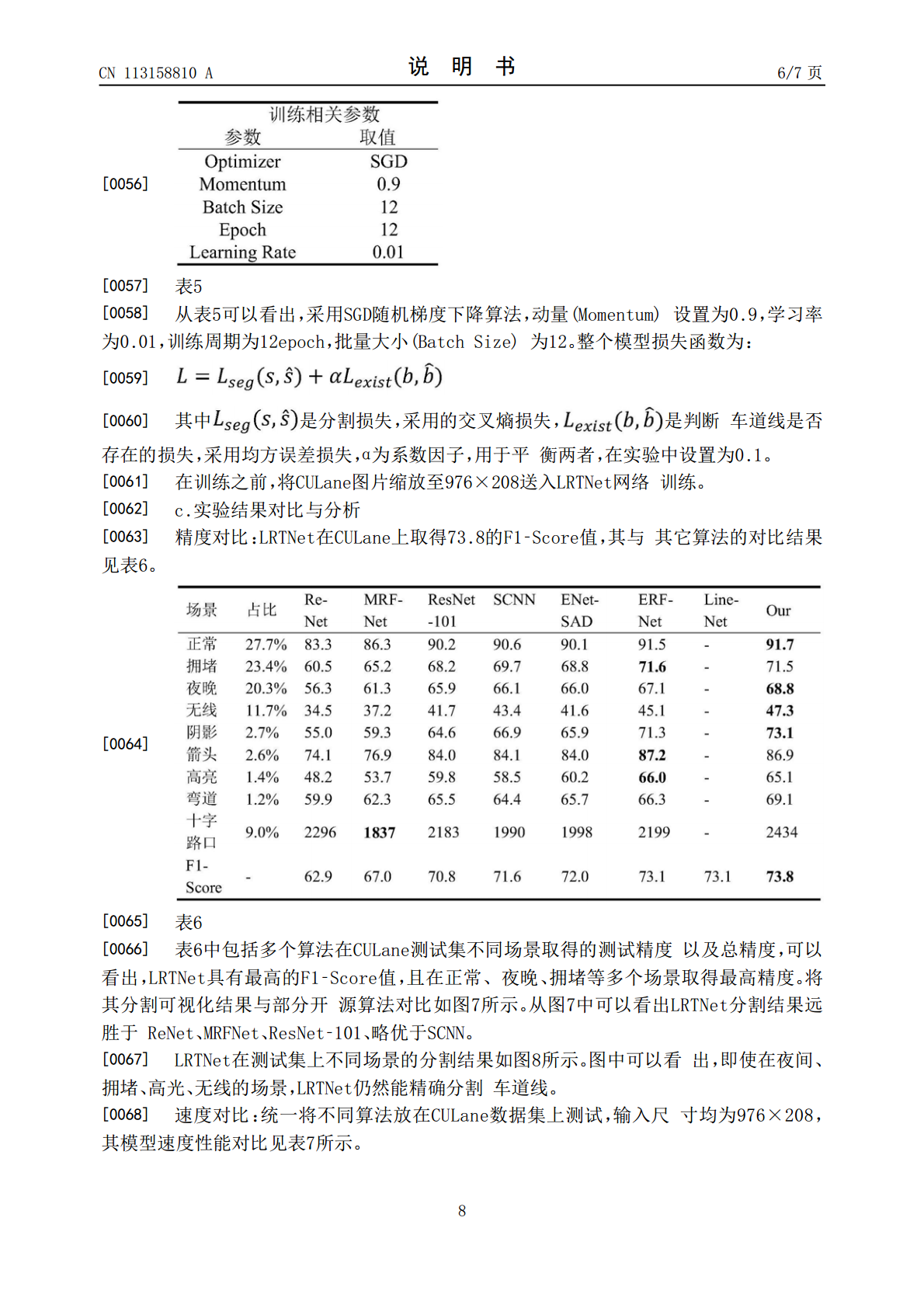
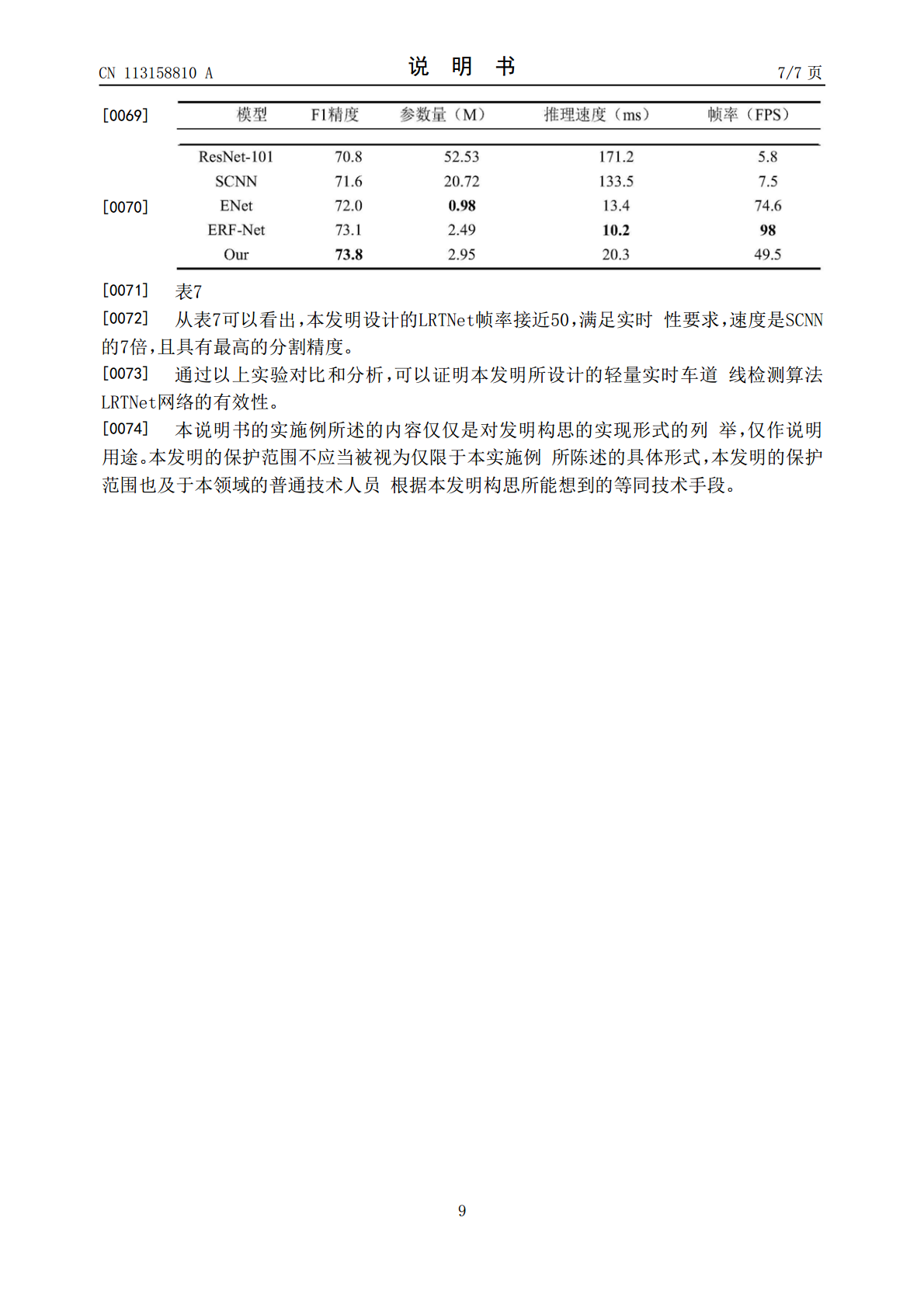
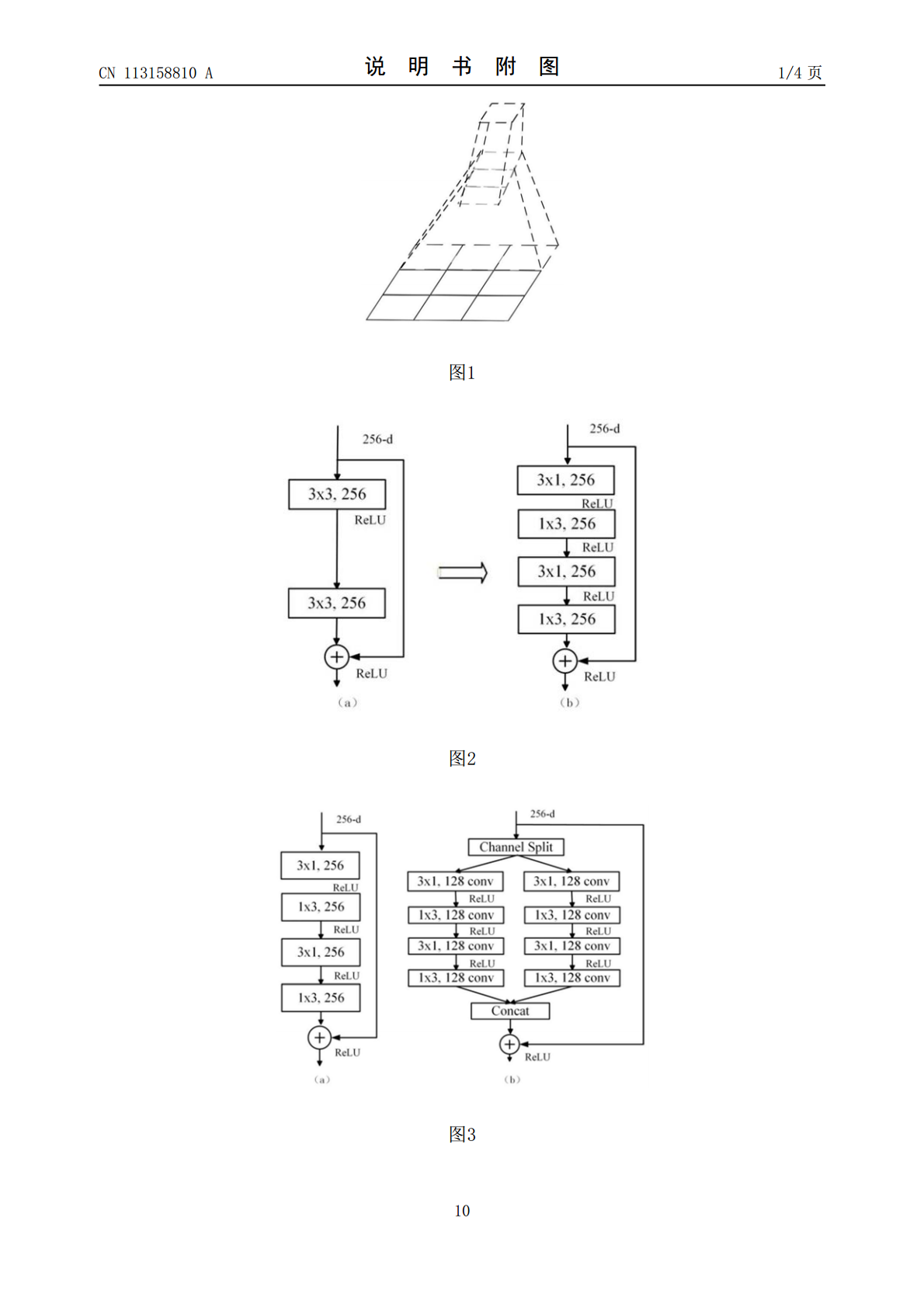
一种基于ENet改进的轻量实时车道线分割方法,所述方法包括以下步骤:(1)将ENet卷积分解:将其每一个二维卷积拆分成两个一维卷积;(2)空间分离卷积模块的每个一维卷积核通道拆分为两组,一个256通道数核拆分成两个128通道核,最后再融合为一组;再经过一个3×3的卷积并随机打乱通道,使两组通道学习到的信息充分共享和通信;(3)在编码器和解码器增加两条跳跃连接,设置概率预测分支用于预测车道线存在的概率,根据设定的阈值判断某车道的车道线是否存在;完成车道线分割网络LRTNet的构建;(4)将车道线图片输入到所

基于改进Enet网络的车道线检测算法.docx
基于改进Enet网络的车道线检测算法基于改进Enet网络的车道线检测算法1.引言汽车车道线的准确检测对于自动驾驶、智能交通系统和驾驶辅助系统等应用具有重要意义。传统的车道线检测方法通常基于图像处理技术和机器学习算法,但受限于计算资源和算法的效果,无法在复杂的道路场景中准确地检测和跟踪车道线。2.相关工作基于深度学习的车道线检测方法近年来取得了显著进展。Enet网络是一种轻量级的语义分割网络,具有较高的计算效率和较小的模型大小。然而,基于Enet网络的车道线检测方法在复杂的道路场景下仍然存在一些挑战,如车道
一种基于语义分割技术的车道线检测方法.pdf
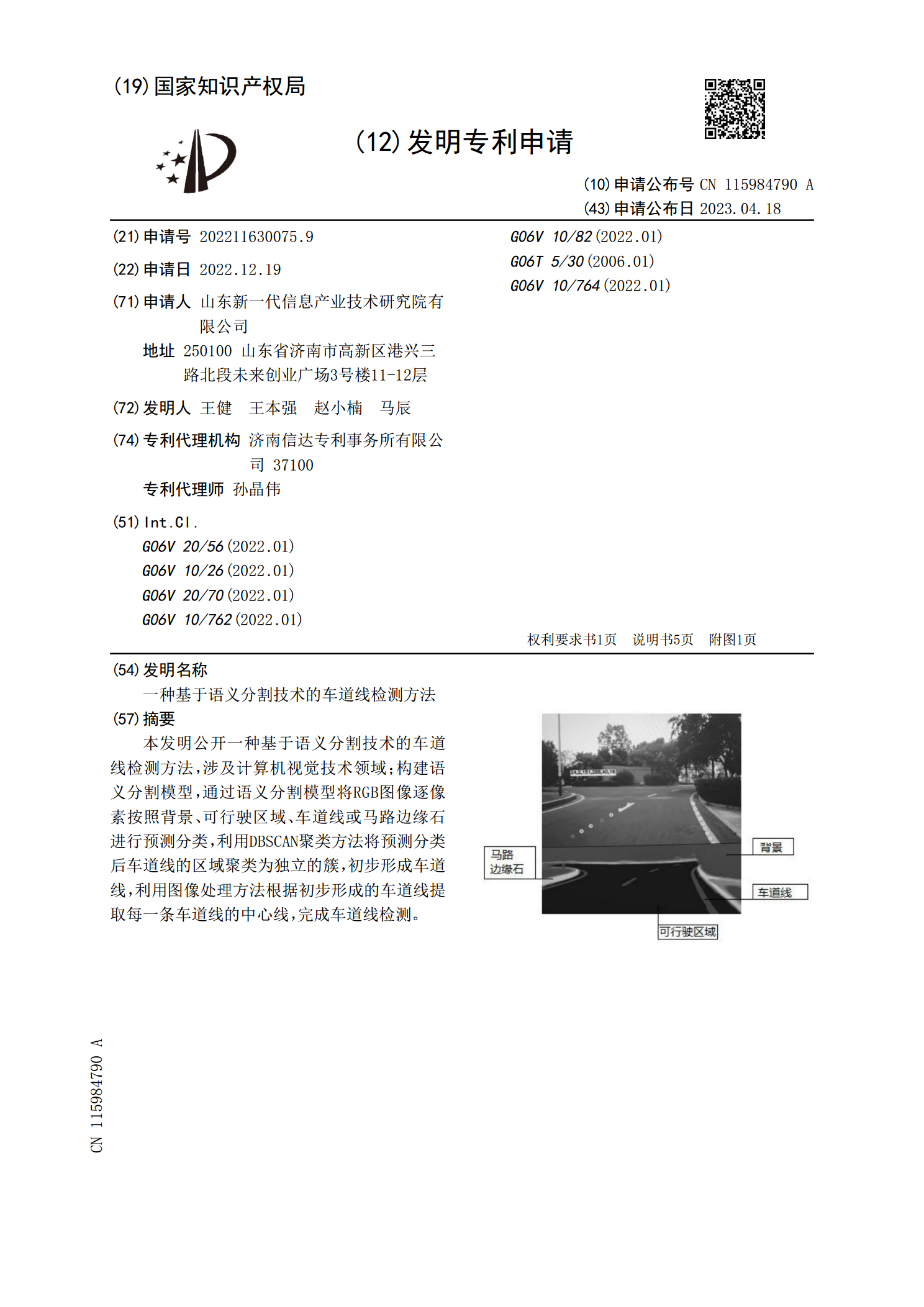
本发明公开一种基于语义分割技术的车道线检测方法,涉及计算机视觉技术领域;构建语义分割模型,通过语义分割模型将RGB图像逐像素按照背景、可行驶区域、车道线或马路边缘石进行预测分类,利用DBSCAN聚类方法将预测分类后车道线的区域聚类为独立的簇,初步形成车道线,利用图像处理方法根据初步形成的车道线提取每一条车道线的中心线,完成车道线检测。
基于行列解耦采样的轻量车道线检测模型.pptx
基于行列解耦采样的轻量车道线检测模型目录添加章节标题模型概述行列解耦采样的原理轻量车道线检测模型的特点模型的应用场景行列解耦采样方法传统采样方法的局限性行列解耦采样的优势行列解耦采样的实现方式行列解耦采样的效果评估轻量车道线检测模型的构建数据预处理特征提取分类器设计模型训练与优化模型性能评估准确率评估召回率评估F1值评估实时性评估模型优化方向模型复杂度优化特征提取方法优化分类器设计优化数据集增强方法优化THANKYOU

基于密集分割网络的车道线检测方法.docx
基于密集分割网络的车道线检测方法摘要车道线检测在自动驾驶技术中扮演着重要的角色。本文提出了一种基于密集分割网络的车道线检测方法。首先,我们使用全卷积神经网络(FCN)对图像进行像素级别的语义分割,以实现车道区域的精确划分。然后,我们将分割输出与二值化处理相结合,得到最终的车道线检测结果。实验结果表明,本方法可以实现准确、鲁棒的车道线检测,具有较高的实用性和实时性。关键词:密集分割网络,全卷积神经网络,语义分割,车道线检测引言随着自动驾驶技术的发展和应用,车道线检测成为了不可或缺的技术。通过车道线的检测和识