
基于密集分割网络的车道线检测方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于密集分割网络的车道线检测方法.docx
基于密集分割网络的车道线检测方法摘要车道线检测在自动驾驶技术中扮演着重要的角色。本文提出了一种基于密集分割网络的车道线检测方法。首先,我们使用全卷积神经网络(FCN)对图像进行像素级别的语义分割,以实现车道区域的精确划分。然后,我们将分割输出与二值化处理相结合,得到最终的车道线检测结果。实验结果表明,本方法可以实现准确、鲁棒的车道线检测,具有较高的实用性和实时性。关键词:密集分割网络,全卷积神经网络,语义分割,车道线检测引言随着自动驾驶技术的发展和应用,车道线检测成为了不可或缺的技术。通过车道线的检测和识

基于双阈值分割的车道线检测方法.docx
基于双阈值分割的车道线检测方法引言车道线检测是自动驾驶系统和智能驾驶辅助系统中的重要任务,车道线检测与车辆的行驶状态、安全性,与驾驶员的疲劳程度等都密切相关。因此,对于车道线检测算法的研究和探索,是智能驾驶技术发展的关键。在车道线检测算法中,基于双阈值分割的方法是一种重要的处理方式。该方法可以有效地将图像中的目标区域与背景区域分离开来,从而实现车道线的快速精确检测。本文将对基于双阈值分割的车道线检测方法进行介绍和分析,旨在为相关研究提供参考。双阈值分割算法介绍双阈值分割算法是一种可以在复杂场景中提高检测准

基于实例分割方法的复杂场景下车道线检测.docx
基于实例分割方法的复杂场景下车道线检测基于实例分割方法的复杂场景下车道线检测摘要:随着自动驾驶技术的不断发展,车道线检测在道路安全和自动驾驶的实现中起着至关重要的作用。然而,在复杂场景下,如大规模交叉口及复杂路况中,车道线检测仍然面临着许多挑战。本论文提出了一种基于实例分割方法的车道线检测算法,以应对复杂场景中的车道线检测问题。通过对车道线的分割和实例化,我们可以精确地检测出车道线的位置和形状,并在实践中验证了算法的有效性。1.引言车道线检测是自动驾驶技术中不可或缺的一部分,它可以提供实时的道路信息,帮助
一种基于语义分割技术的车道线检测方法.pdf
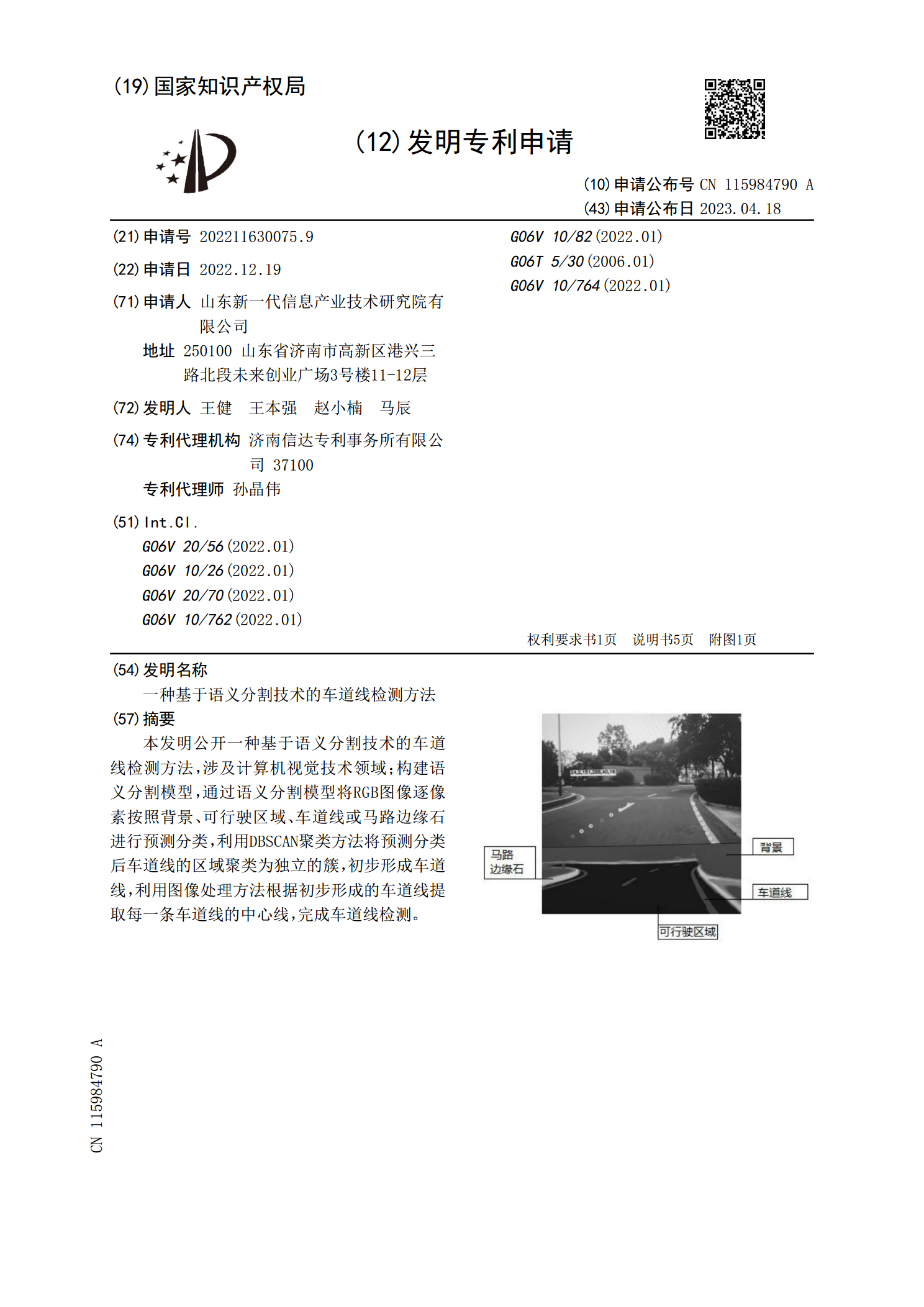
本发明公开一种基于语义分割技术的车道线检测方法,涉及计算机视觉技术领域;构建语义分割模型,通过语义分割模型将RGB图像逐像素按照背景、可行驶区域、车道线或马路边缘石进行预测分类,利用DBSCAN聚类方法将预测分类后车道线的区域聚类为独立的簇,初步形成车道线,利用图像处理方法根据初步形成的车道线提取每一条车道线的中心线,完成车道线检测。

基于语义分割的车道线检测算法研究.pptx
基于语义分割的车道线检测算法研究01添加章节标题语义分割和车道线检测算法概述语义分割的定义和作用车道线检测算法的原理和重要性语义分割在车道线检测中的应用基于语义分割的车道线检测算法流程数据预处理特征提取语义分割车道线检测基于语义分割的车道线检测算法实现细节深度学习模型的选取模型训练和优化模型评估和测试算法改进和优化基于语义分割的车道线检测算法的优势和局限性算法的优势算法的局限性未来研究方向和展望基于语义分割的车道线检测算法的应用场景和实例分析自动驾驶系统中的应用智能交通系统中的应用实例分析和比较感谢观看