
一种基于双分支语义分割网络的道路要素检测方法及装置.pdf

灵波****ng

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双分支语义分割网络的道路要素检测方法及装置.pdf
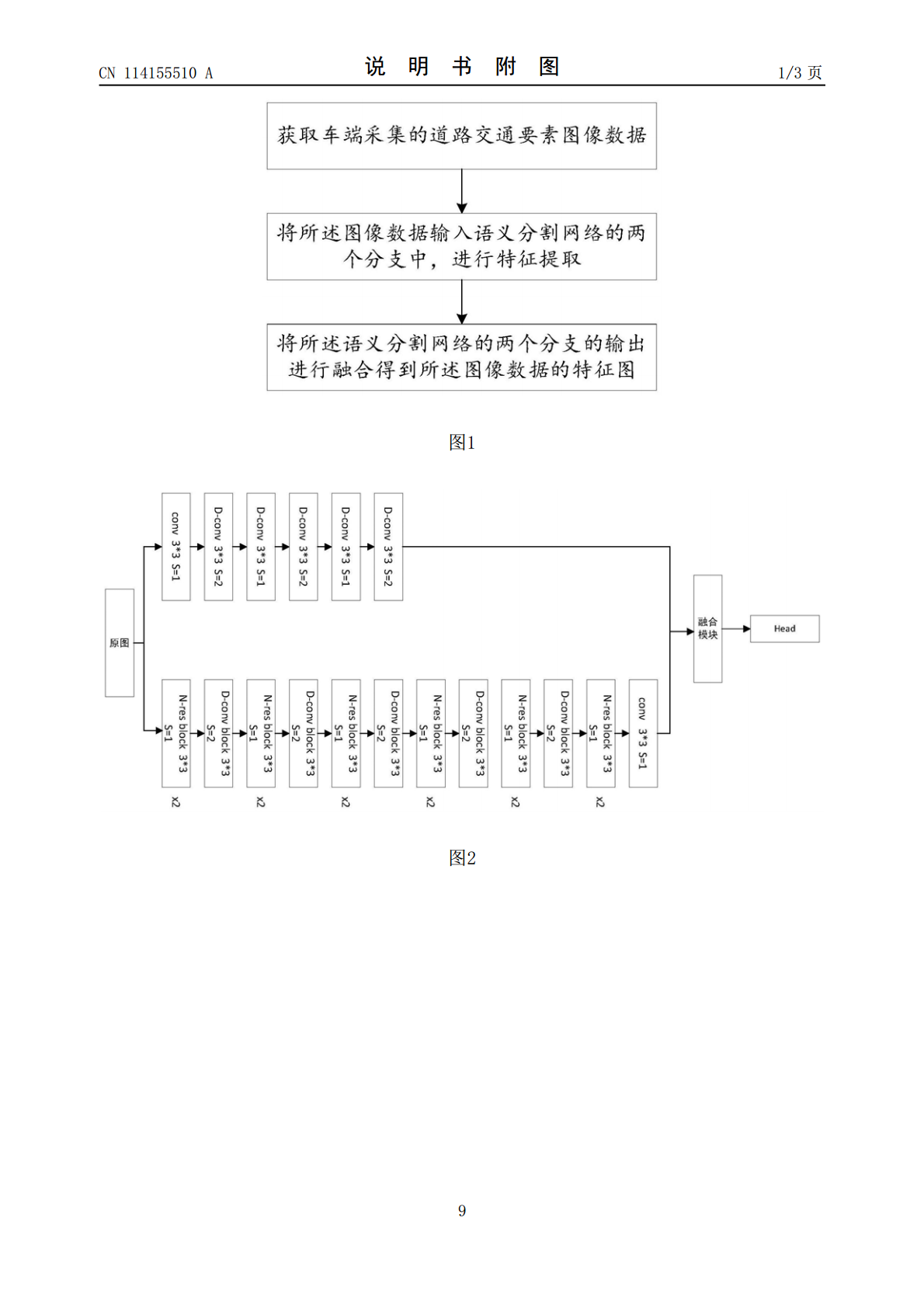
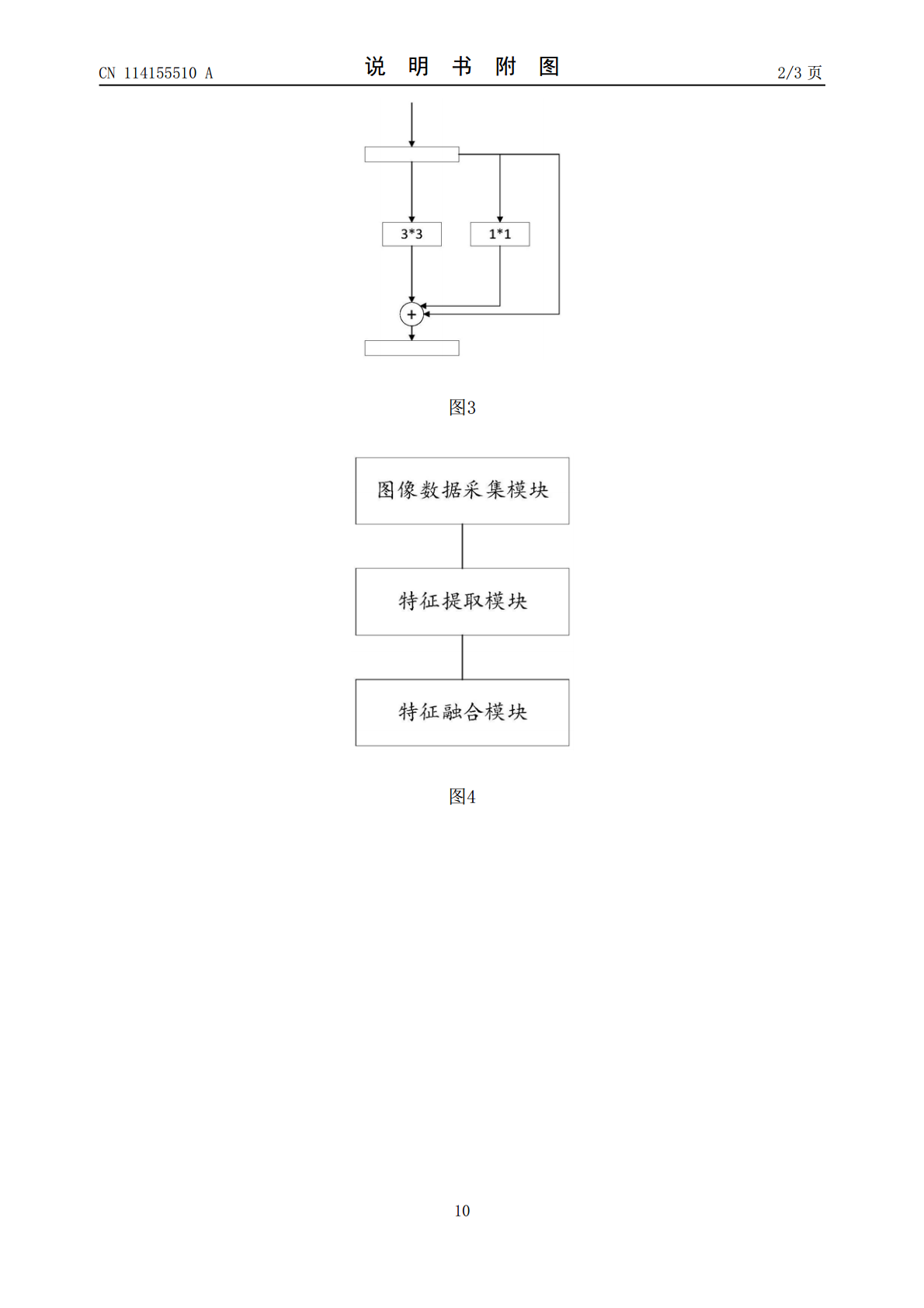
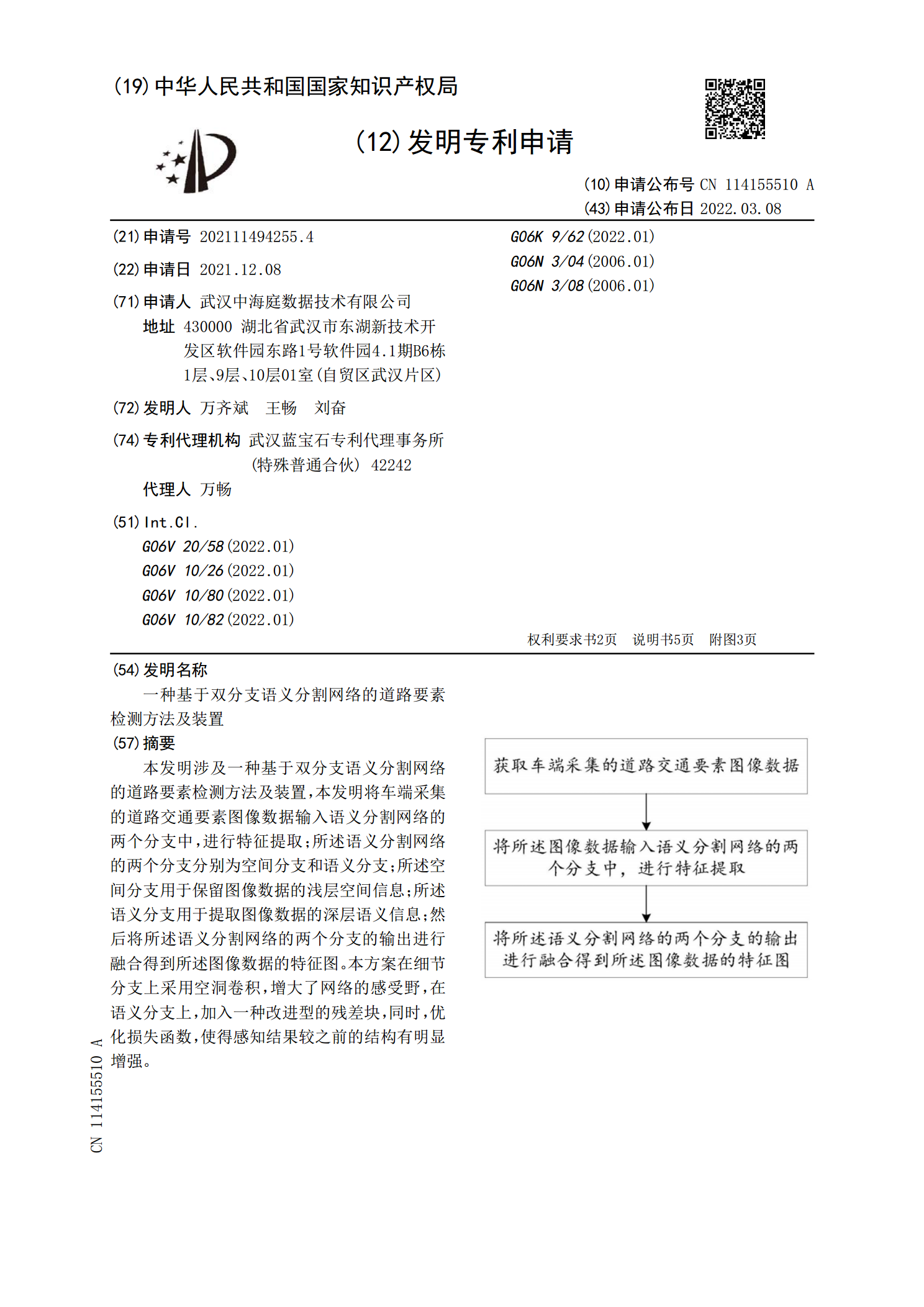
本发明涉及一种基于双分支语义分割网络的道路要素检测方法及装置,本发明将车端采集的道路交通要素图像数据输入语义分割网络的两个分支中,进行特征提取;所述语义分割网络的两个分支分别为空间分支和语义分支;所述空间分支用于保留图像数据的浅层空间信息;所述语义分支用于提取图像数据的深层语义信息;然后将所述语义分割网络的两个分支的输出进行融合得到所述图像数据的特征图。本方案在细节分支上采用空洞卷积,增大了网络的感受野,在语义分支上,加入一种改进型的残差块,同时,优化损失函数,使得感知结果较之前的结构有明显增强。

一种基于语义分割网络的分治检测方法.pdf
本发明公开了一种基于语义分割网络的分治检测算法。本发明借助语义分割网络实现了距离多普勒域的杂波区域分割,并针对不同杂波区主体和边缘的特点制定了检测策略,从备选检测器组中选择适当的检测器和合理检测参数完成分治检测,在最大程度检测出目标的同时有效抑制虚警。该技术对于低空小目标的雷达探测具有重要意义。相比于检测平面归一化的方法来说,本方法不需要检测平面转换,计算量更小,同时避免了参数估计结果对检测平面转换的影响,鲁棒性更强。
面向复杂场景的不对称双分支实时语义分割网络的方法.pdf
本发明涉及计算机视觉理解领域,尤其涉及面向复杂场景的不对称双分支实时语义分割网络的方法;包括以下步骤:基于特征共享的下采样模块获取低分辨率图像;基于更宽通道的轻量级双分支模块提取高级语义特征和低级细节特征;使用特征指导融合模块多尺度融合两个分支的语义和空间信息;基于特征恢复模块得到最终分割结果图。本发明通过共享浅层信息和特征指导的方式充分融合语义信息和空间信息,并基于不对称残差瓶颈模块作为语义分支的核心特征提取单元,最后结合多尺度信息完成密集特征的提取,解决了复杂场景中目标类别混淆、形状不规则和物体遮挡干

基于Transformer的双分支互补语义线检测方法.pdf
语义线对于场景感知与场景理解等高级视觉任务具有重要意义。由于能够利用简单的线结构为图像场景赋予直观的视觉解释,语义线检测任务近年来受到了更多的关注。然而现有的语义线检测方法存在模型难以端到端优化、正负类别样本数量不平衡以及缺少全局建模导致线语义关联性低的问题。为解决上述问题,本发明以Transformer模型作为主体结构,设计并实现了基于Transformer的双分支互补语义线检测模型及互补检测方法。该方法的整体检测流程可分为三个阶段:(1)多尺度图像特征的提取与利用深度霍夫变换的空间变换(2)由粗粒度到

一种基于双分支网络模型的云检测方法.pdf
本申请涉及遥感图像处理技术领域,提出了一种基于双分支网络模型的云检测方法,包括以下步骤:构建云检测数据集并设计TransDiffNet云检测模型;基于TransDiffNet云检测模型预测,输入遥感影像表观反射率和差异特征,获得遥感影像云检测结果,本方案弥补纯卷积神经网络(ConvolutionalNeuralNetwork,CNN)结构获取全局信息的缺失和纯Transformer结构捕获空间细节特征的不足,减少云与明亮地表特征的混淆以及薄云遗漏,提高云检测精度。