
一种基于预定义树的多模态行人轨迹预测方法及系统.pdf

文光****iu

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于预定义树的多模态行人轨迹预测方法及系统.pdf
本发明公开了一种基于预定义树的多模态行人轨迹预测方法及系统,所述方法包括以下步骤:获取行人的观测轨迹序列;基于行人的观测轨迹序列中的运动速度,构建粗粒度轨迹树;基于观测轨迹序列和粗粒度轨迹树,采用预训练好的神经网络对所述粗粒度轨迹树的每个分支进行优化,获得优化后的轨迹树;其中,所述优化后的轨迹树的分支用于表示最终的多模态行人轨迹预测结果。本发明中,基于行人的通用运动模式,将多种可能的未来轨迹表示成一颗轨迹树,每条从根节点到叶子节点的路径表示成一种可能的路径,具有良好的可解释性与独特的运动特征;可预测出稳定
一种车辆轨迹多模态预测方法.pdf
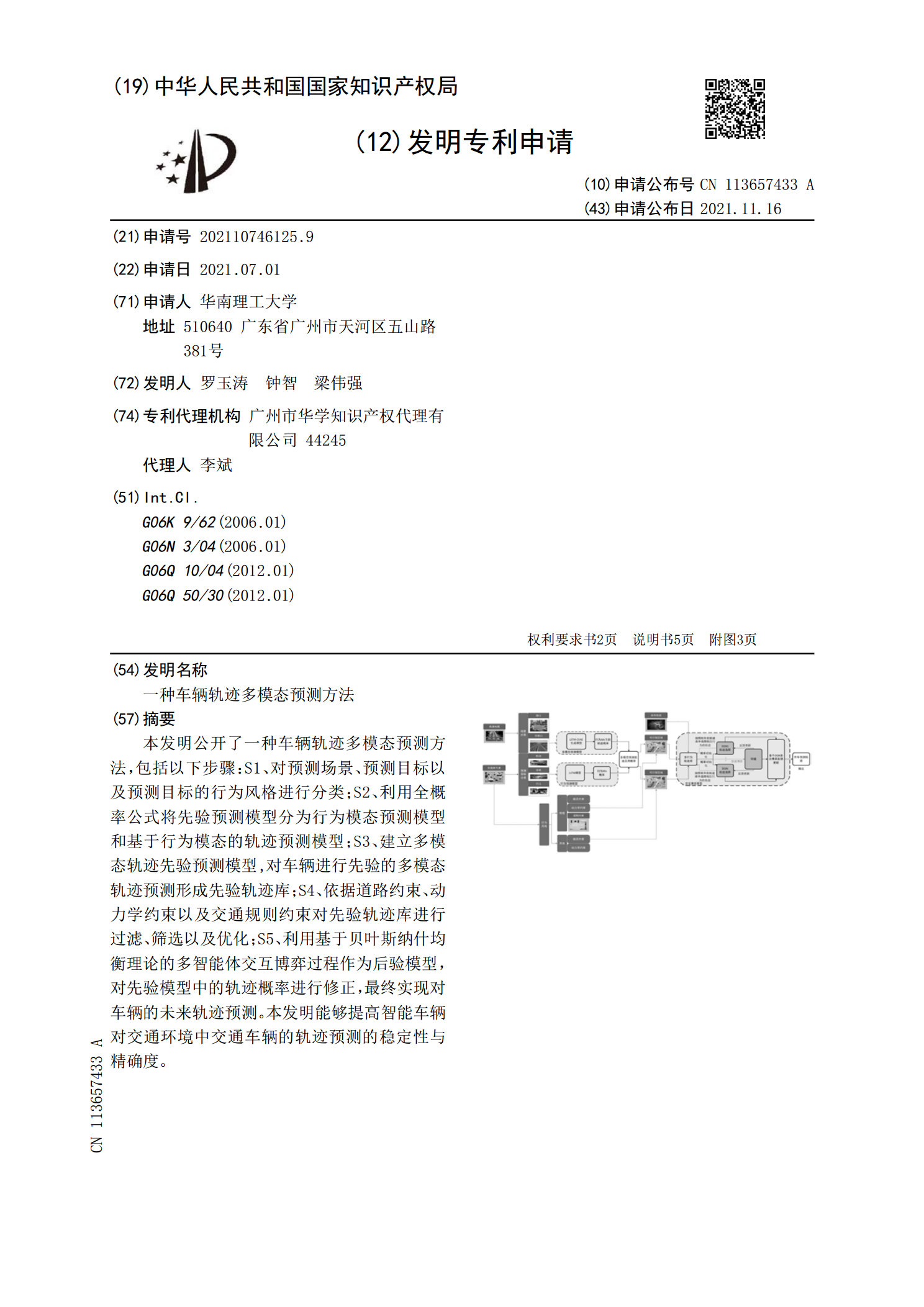
本发明公开了一种车辆轨迹多模态预测方法,包括以下步骤:S1、对预测场景、预测目标以及预测目标的行为风格进行分类;S2、利用全概率公式将先验预测模型分为行为模态预测模型和基于行为模态的轨迹预测模型;S3、建立多模态轨迹先验预测模型,对车辆进行先验的多模态轨迹预测形成先验轨迹库;S4、依据道路约束、动力学约束以及交通规则约束对先验轨迹库进行过滤、筛选以及优化;S5、利用基于贝叶斯纳什均衡理论的多智能体交互博弈过程作为后验模型,对先验模型中的轨迹概率进行修正,最终实现对车辆的未来轨迹预测。本发明能够提高智能车辆
一种基于多模态的轨迹文本匹配方法.pdf
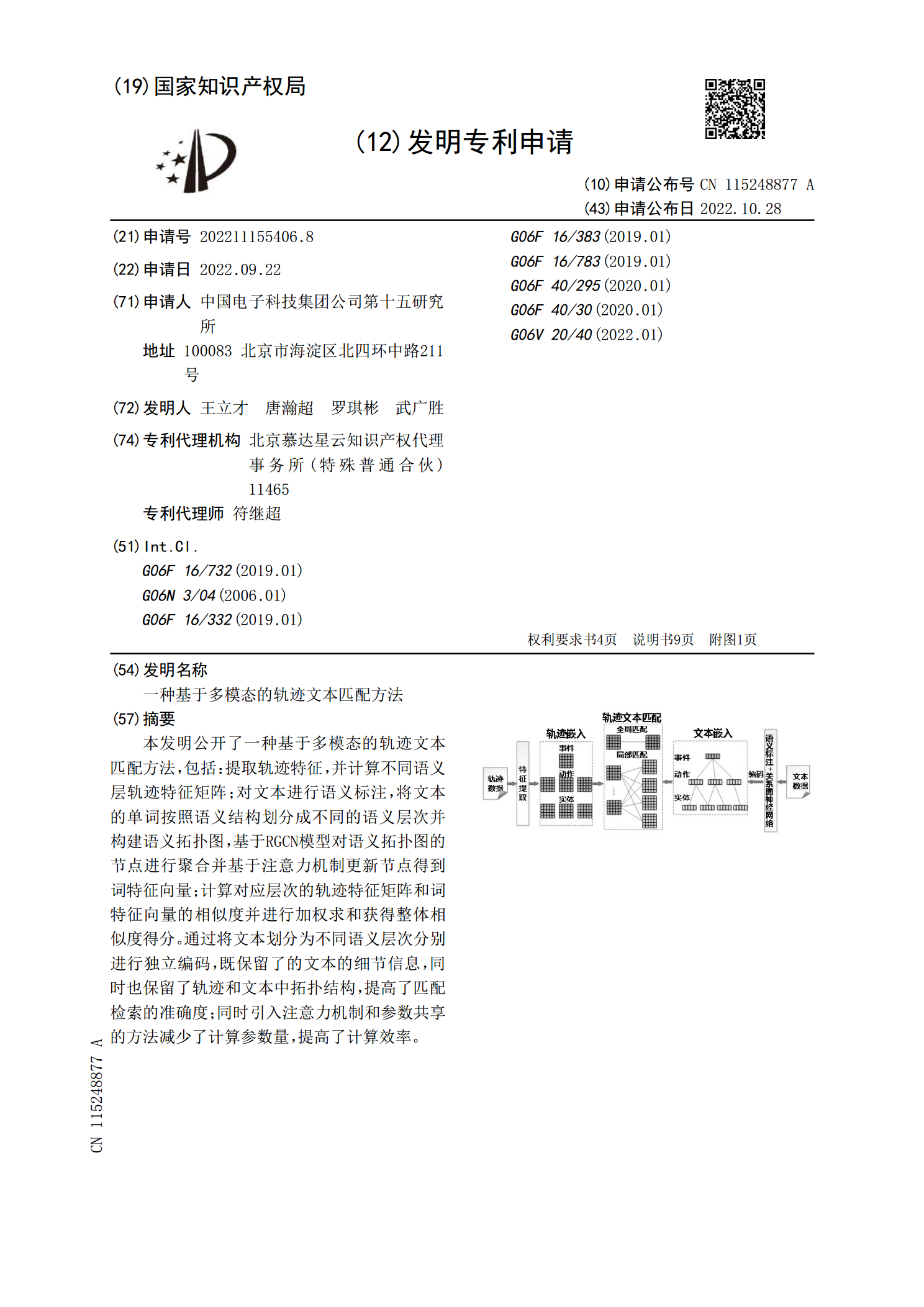
本发明公开了一种基于多模态的轨迹文本匹配方法,包括:提取轨迹特征,并计算不同语义层轨迹特征矩阵;对文本进行语义标注,将文本的单词按照语义结构划分成不同的语义层次并构建语义拓扑图,基于RGCN模型对语义拓扑图的节点进行聚合并基于注意力机制更新节点得到词特征向量;计算对应层次的轨迹特征矩阵和词特征向量的相似度并进行加权求和获得整体相似度得分。通过将文本划分为不同语义层次分别进行独立编码,既保留了的文本的细节信息,同时也保留了轨迹和文本中拓扑结构,提高了匹配检索的准确度;同时引入注意力机制和参数共享的方法减少了

基于多模态的深度学习预测方法、系统、介质及设备.pdf
本发明提供一种基于多模态的深度学习预测方法、系统、介质及设备,所述基于多模态的深度学习预测方法包括:获取图像数据集,所述图像数据集包括至少两个模态的图像数据;将所述图像数据进行特征提取,以生成与每个模态对应的特征提取结果;结合预设的约束项对所述特征提取结果进行融合并分类预测。本发明设计了多模态的网络结构,对于每一个模态的图像,分别使用卷积神经网络进行特征提取,然后结合约束项在全连接层将这些特征进行融合,综合不同模态的特征信息,得到最终的分类结果。这样既保留了单个模态的信息特点又可以综合利用多模态的信息,提
一种基于多模态融合的肿瘤分类方法及系统.pdf
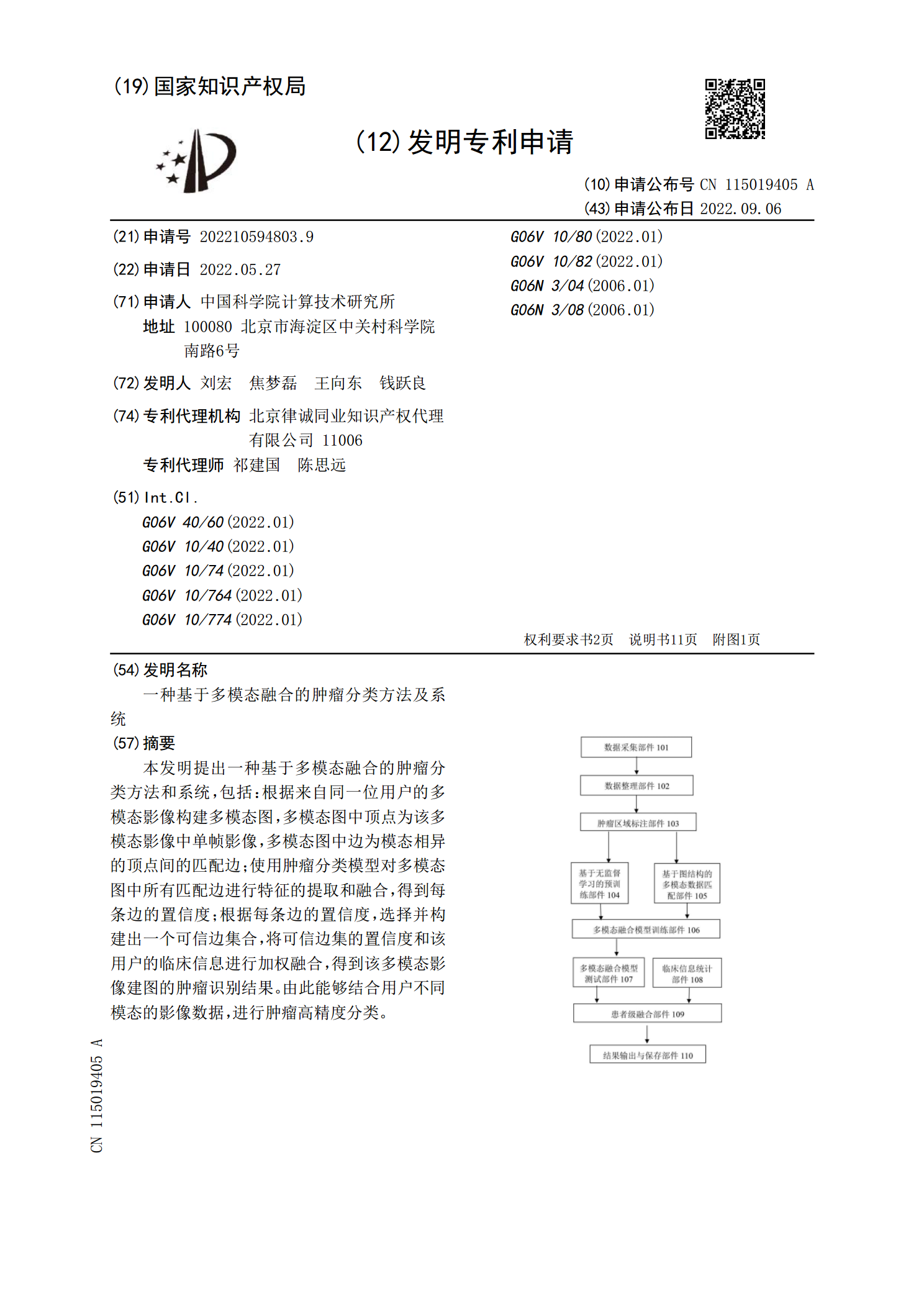
本发明提出一种基于多模态融合的肿瘤分类方法和系统,包括:根据来自同一位用户的多模态影像构建多模态图,多模态图中顶点为该多模态影像中单帧影像,多模态图中边为模态相异的顶点间的匹配边;使用肿瘤分类模型对多模态图中所有匹配边进行特征的提取和融合,得到每条边的置信度;根据每条边的置信度,选择并构建出一个可信边集合,将可信边集的置信度和该用户的临床信息进行加权融合,得到该多模态影像建图的肿瘤识别结果。由此能够结合用户不同模态的影像数据,进行肿瘤高精度分类。