
一种多智能体编队控制方法、系统及电子设备.pdf

玉军****la

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多智能体编队控制方法、系统及电子设备.pdf
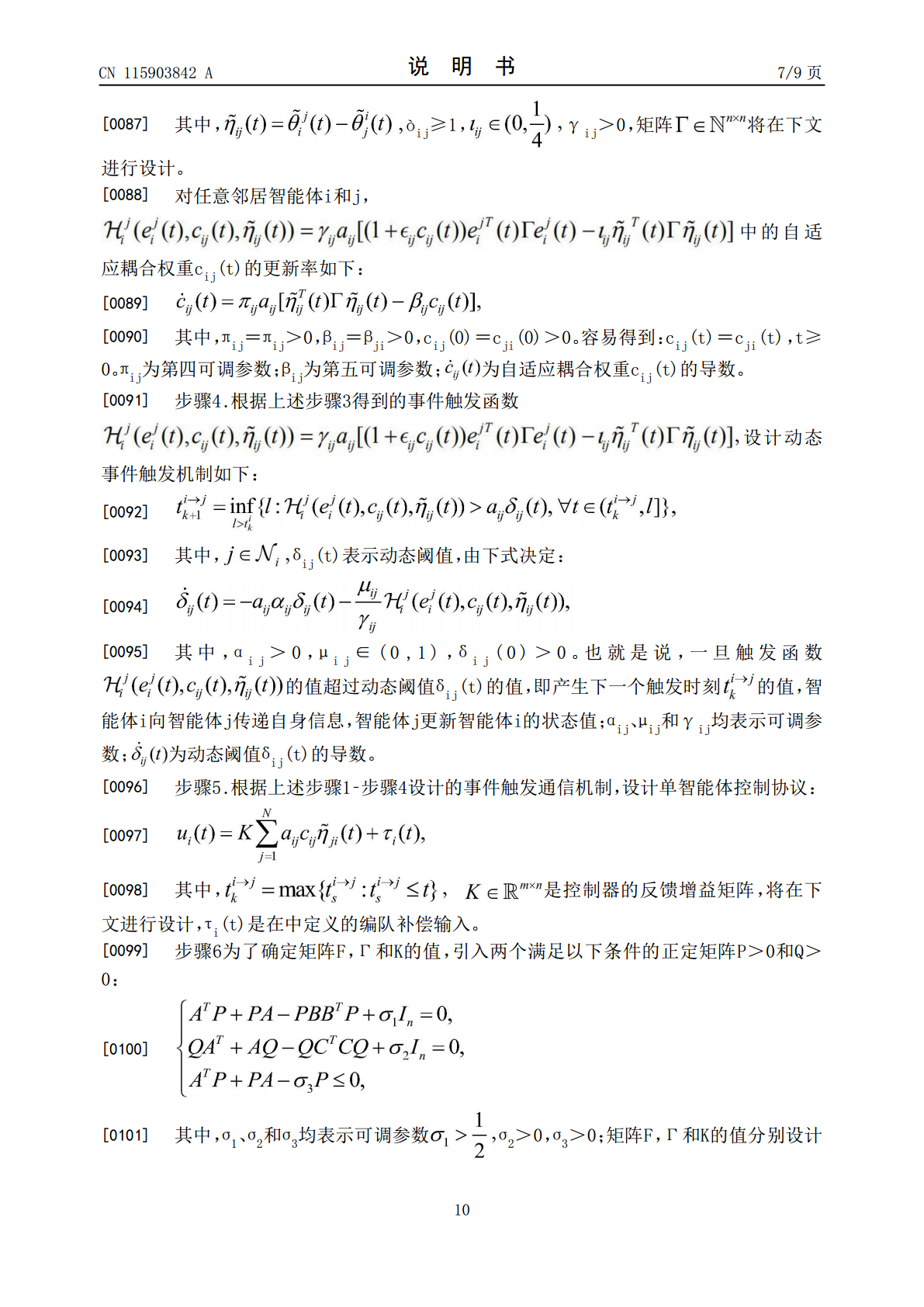
本发明提供的一种多智能体编队控制方法、系统及电子设备,属于多智能体编队控制技术领域。本发明构建多智能体系统模型;多智能体系统模型用于描述多智能体系统中每个智能体的运动状态、控制输入和传感器输出;确定多智能体系统模型的通信拓扑关系;确定多智能体系统模型的期望编队;根据多智能体系统模型、通信拓扑关系和期望编队,基于触发条件对多智能体系统进行时变控制。本发明通过设置触发条件能够使邻居智能体仅在触发条件被满足时进行通信,无需多智能体系统全局通信拓扑信息即可完成多智能体的编队控制,在保证编队控制准确性的同时,减轻了
多智能体编队控制研究.pptx
汇报人:/目录0102编队控制问题的提出研究背景和现状研究意义和应用价值03多智能体系统的定义和特点多智能体系统的结构和分类多智能体系统的研究内容和目标04编队控制算法的分类和特点基于行为的多智能体编队控制算法基于图论的多智能体编队控制算法改进的编队控制算法05实验平台和环境搭建实验过程和结果分析实验结果与结论06研究成果总结未来研究方向和展望汇报人:

异构多智能体系统的协作编队控制方法研究.docx
异构多智能体系统的协作编队控制方法研究异构多智能体系统的协作编队控制方法研究摘要:随着智能机器人技术的发展和应用,多智能体系统在各个领域的应用逐渐增多。在协作任务中,多智能体系统的编队控制是一个关键问题。本论文研究了异构多智能体系统的协作编队控制方法,并提出了一种基于集体目标和个体目标的混合控制策略。实验结果表明,该方法可以有效地实现异构多智能体系统的协作编队控制。关键词:多智能体系统;异构;协作编队控制;混合控制策略引言随着科技的不断发展,多智能体系统已经广泛应用于各个领域,如智能交通系统、机器人队列控

多智能体系统非线性编队控制方法研究.docx
多智能体系统非线性编队控制方法研究多智能体系统非线性编队控制方法研究摘要:多智能体系统编队控制在实际应用中具有重要的意义。然而,由于系统动力学的非线性特性,编队控制问题变得复杂和困难。本文综述了多智能体系统非线性编队控制方法的研究进展,并对其中的一些常用方法进行了深入分析和讨论。研究表明,基于领导者-跟随者模式的方法以及基于分布式协同控制的方法都在实际应用中取得了较好的效果。然而,对于复杂的非线性系统,仍然存在一些挑战和问题需要进一步研究和解决。关键词:智能体系统;非线性编队控制;领导者-跟随者模式;分布

多智能系统的编队控制问题研究.docx
多智能系统的编队控制问题研究多智能系统的编队控制问题研究摘要:多智能系统(Multi-AgentSystems,MAS)是一个由多个智能体组成的系统,每个智能体都具有自主性和社会性。编队控制是多智能系统中的一个重要问题,它涉及到多个智能体之间的协同操作和控制,以实现整体目标。本文将对多智能系统的编队控制问题进行研究,包括编队形成和编队保持两个方面,并探讨了一些相关的方法和算法。1.引言多智能系统是由多个智能体组成的系统,每个智能体都具有自主性和社会性。多智能系统具有分布式处理、并行运算和自组织能力等特点,