
基于惯性网络的姿态估计方法及系统.pdf

努力****亚捷


1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于惯性网络的姿态估计方法及系统.pdf
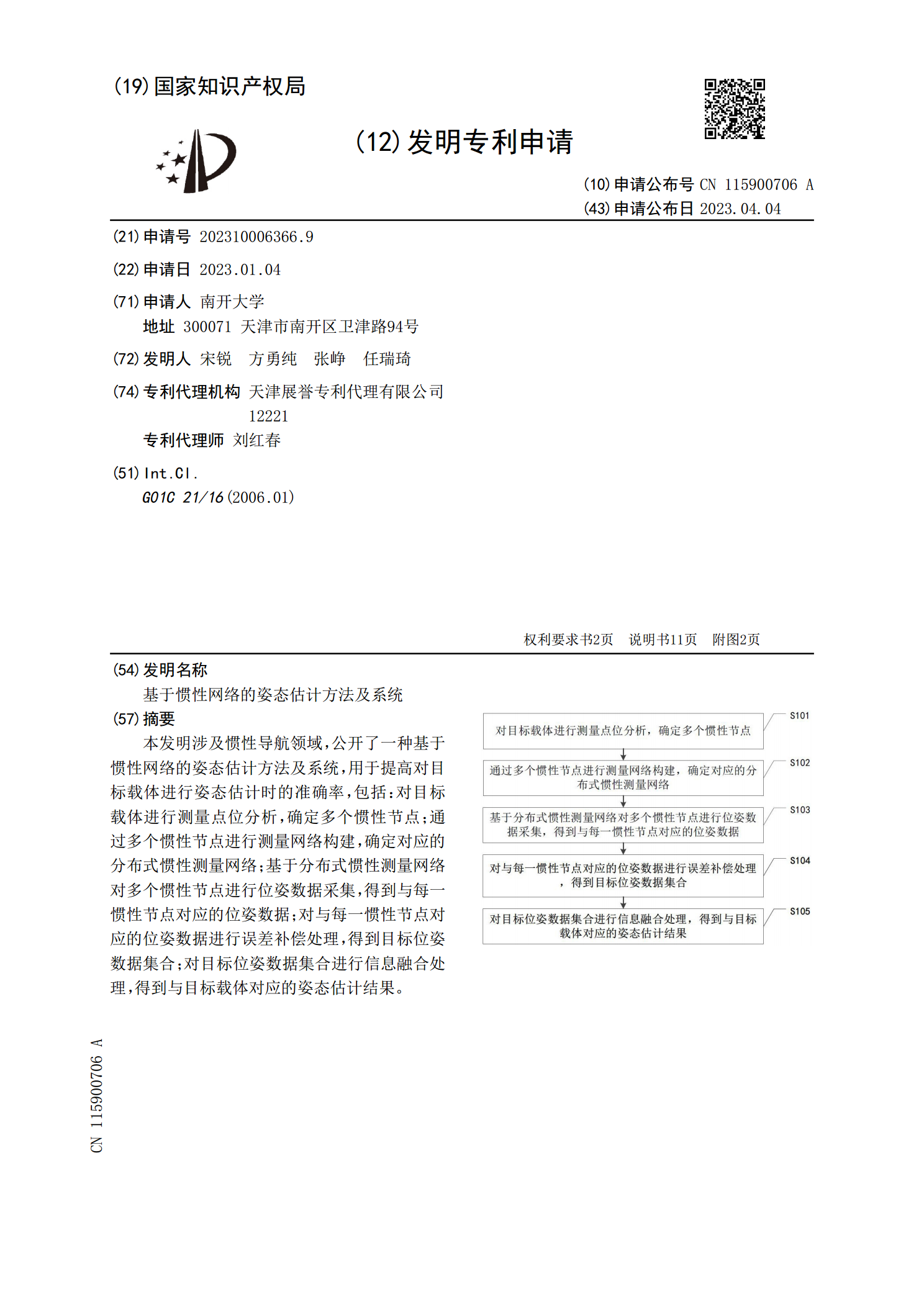
本发明涉及惯性导航领域,公开了一种基于惯性网络的姿态估计方法及系统,用于提高对目标载体进行姿态估计时的准确率,包括:对目标载体进行测量点位分析,确定多个惯性节点;通过多个惯性节点进行测量网络构建,确定对应的分布式惯性测量网络;基于分布式惯性测量网络对多个惯性节点进行位姿数据采集,得到与每一惯性节点对应的位姿数据;对与每一惯性节点对应的位姿数据进行误差补偿处理,得到目标位姿数据集合;对目标位姿数据集合进行信息融合处理,得到与目标载体对应的姿态估计结果。

基于间接EKF的MEMS惯性系统最优姿态估计.pptx
基于间接EKF的MEMS惯性系统最优姿态估计目录添加章节标题间接扩展卡尔曼滤波器(EKF)EKF的基本原理EKF在姿态估计中的应用EKF的优缺点MEMS惯性系统MEMS惯性系统的组成MEMS惯性传感器的原理MEMS惯性传感器的优缺点最优姿态估计姿态估计的定义和重要性最优姿态估计的方法基于间接EKF的最优姿态估计的实现实验验证与结果分析实验设置与数据采集实验结果展示与分析结果与现有方法的比较结论与展望本文工作总结对未来研究的建议和展望THANKYOU
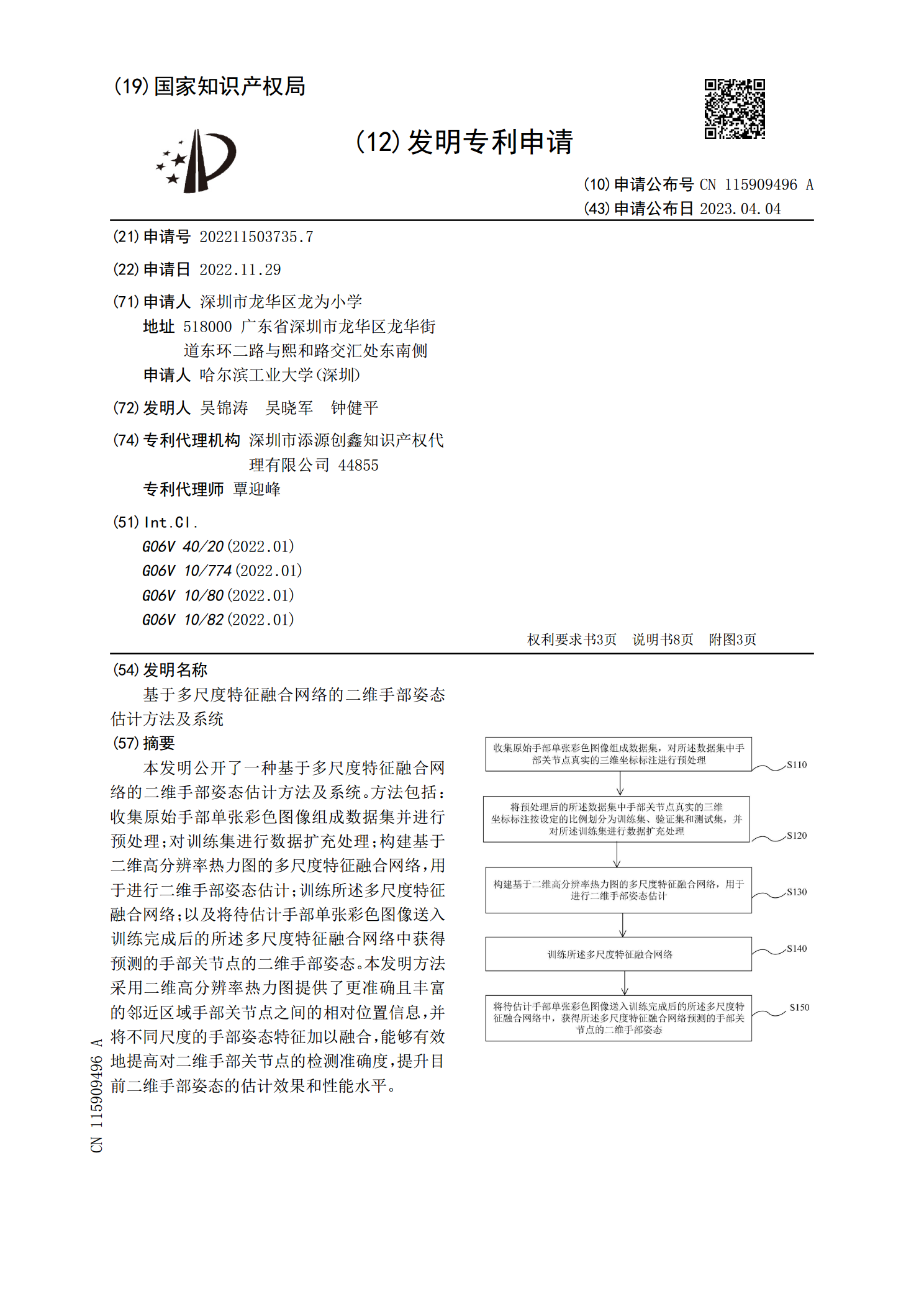
基于多尺度特征融合网络的二维手部姿态估计方法及系统.pdf
本发明公开了一种基于多尺度特征融合网络的二维手部姿态估计方法及系统。方法包括:收集原始手部单张彩色图像组成数据集并进行预处理;对训练集进行数据扩充处理;构建基于二维高分辨率热力图的多尺度特征融合网络,用于进行二维手部姿态估计;训练所述多尺度特征融合网络;以及将待估计手部单张彩色图像送入训练完成后的所述多尺度特征融合网络中获得预测的手部关节点的二维手部姿态。本发明方法采用二维高分辨率热力图提供了更准确且丰富的邻近区域手部关节点之间的相对位置信息,并将不同尺度的手部姿态特征加以融合,能够有效地提高对二维手部关

基于神经网络的人体姿态估计方法研究.docx
基于神经网络的人体姿态估计方法研究随着计算机视觉和深度学习的快速发展,人体姿态估计已成为人机交互、视频监控以及医疗等领域中的重要问题。人体姿态估计是指从图像或视频中估计人体关节的位置、方向和动作信息,以实现人机交互、运动分析、虚拟现实等应用。早期的人体姿态估计方法大多基于手工设计的特征提取算法和机器学习模型。这些算法通常需要人为地提取各种形状和纹理特征,并且对姿态的鲁棒性和实时性存在较大的局限性。而基于神经网络的方法则可以自动学习特征并建立端到端的姿态估计模型,具有更好的鲁棒性和精度。在基于神经网络的人体
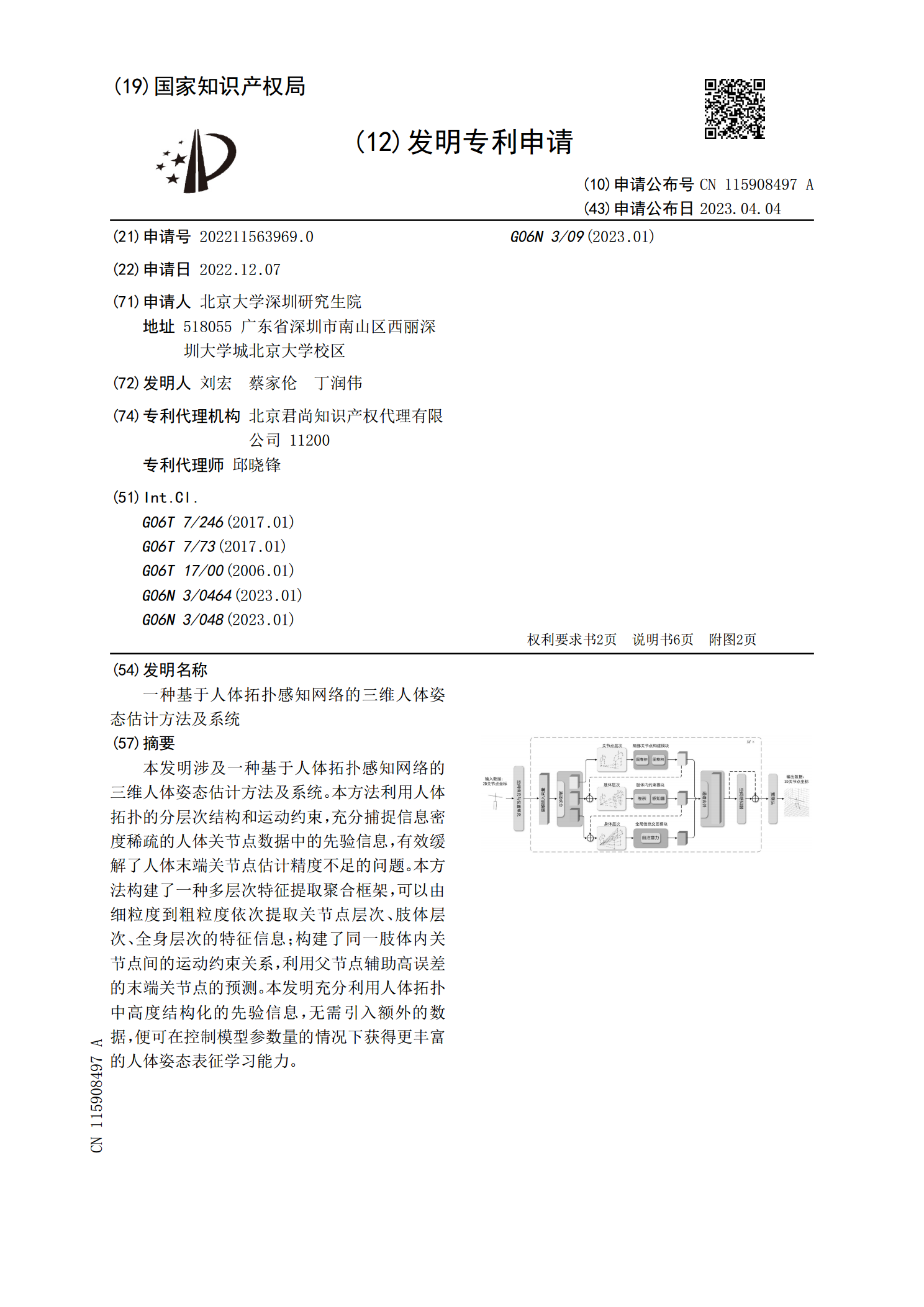
一种基于人体拓扑感知网络的三维人体姿态估计方法及系统.pdf
本发明涉及一种基于人体拓扑感知网络的三维人体姿态估计方法及系统。本方法利用人体拓扑的分层次结构和运动约束,充分捕捉信息密度稀疏的人体关节点数据中的先验信息,有效缓解了人体末端关节点估计精度不足的问题。本方法构建了一种多层次特征提取聚合框架,可以由细粒度到粗粒度依次提取关节点层次、肢体层次、全身层次的特征信息;构建了同一肢体内关节点间的运动约束关系,利用父节点辅助高误差的末端关节点的预测。本发明充分利用人体拓扑中高度结构化的先验信息,无需引入额外的数据,便可在控制模型参数量的情况下获得更丰富的人体姿态表征学