
一种全自动纸箱提手穿扣机的纸箱传送装置.pdf

佳晨****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种全自动纸箱提手穿扣机的纸箱传送装置.pdf
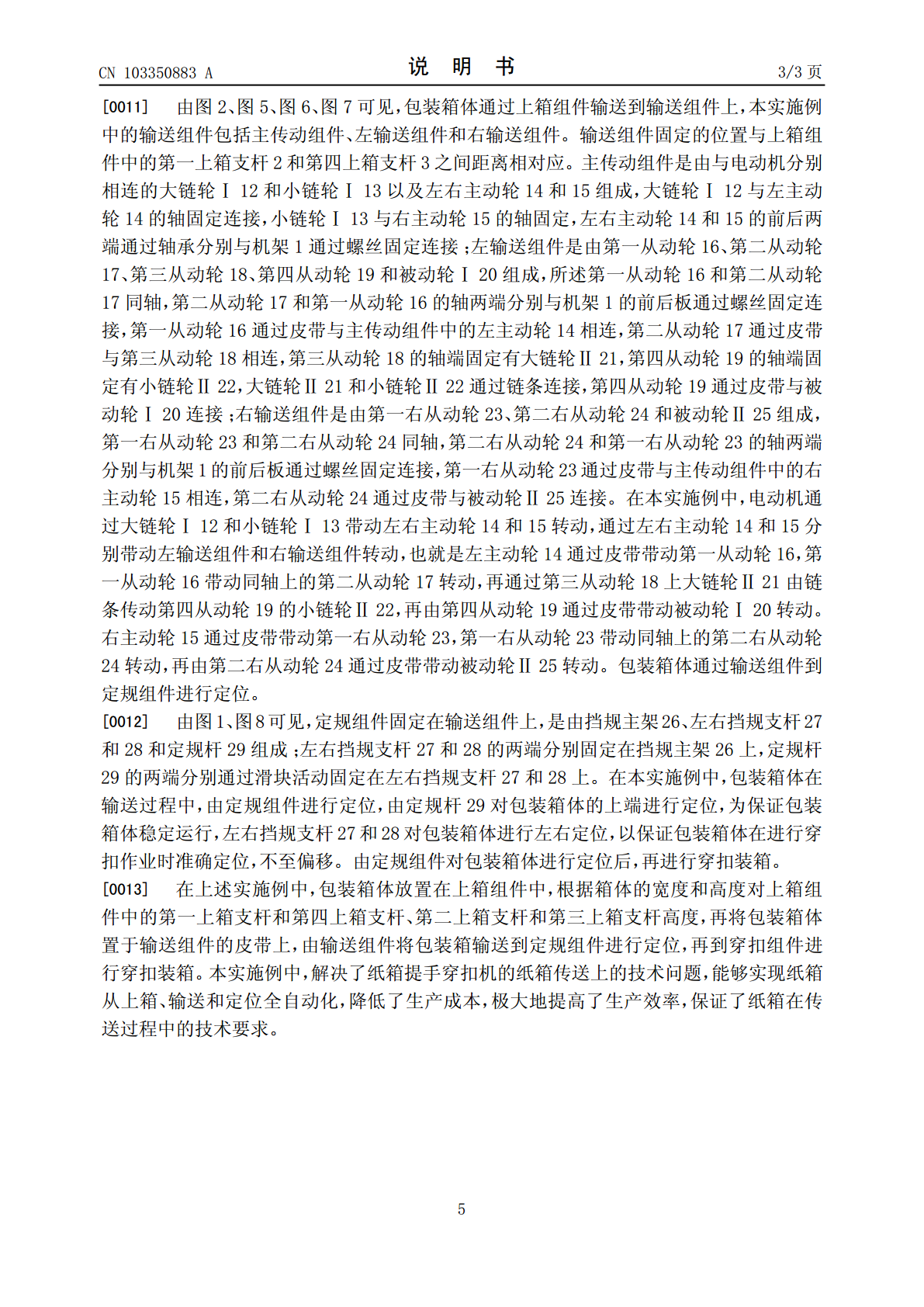
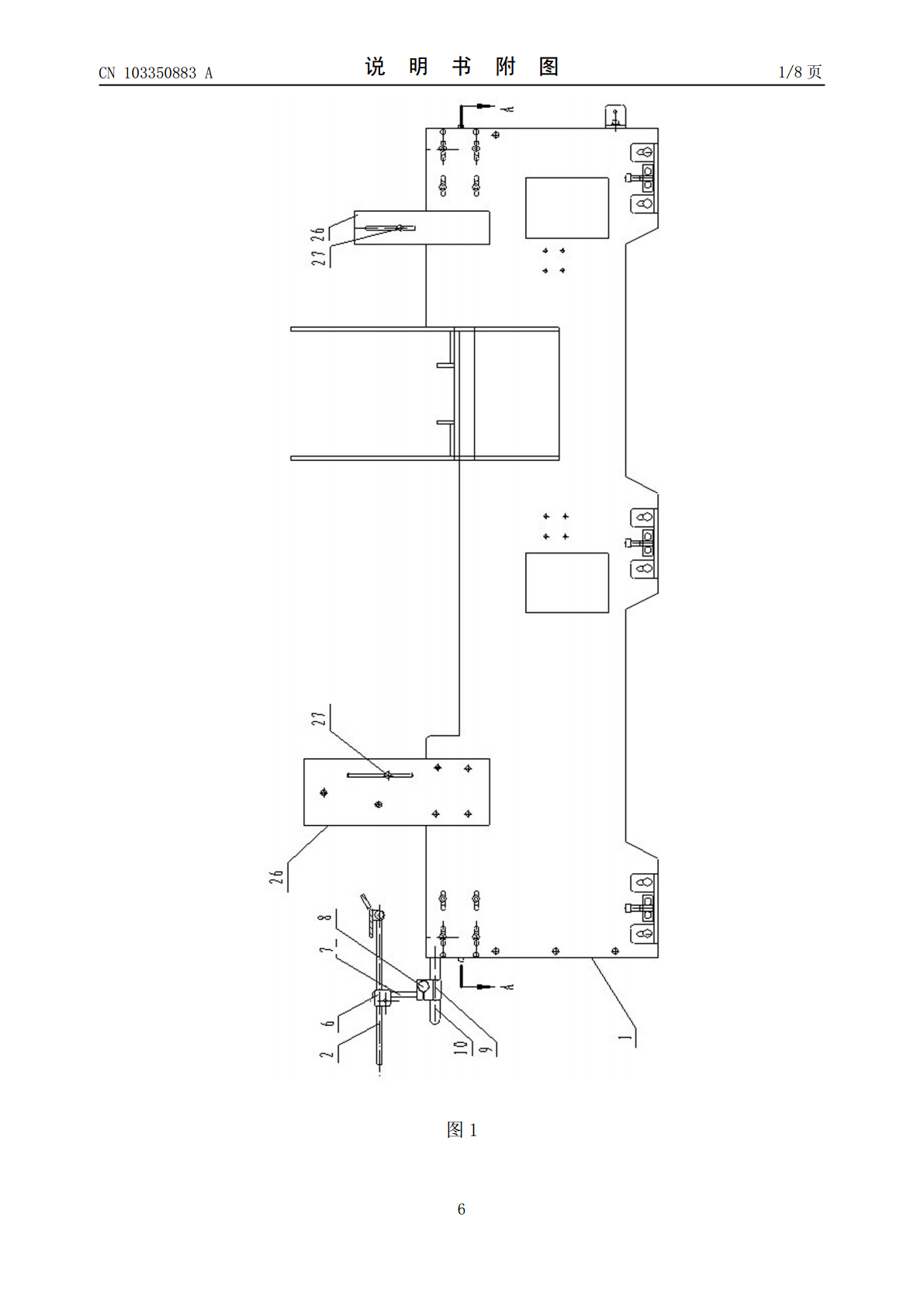
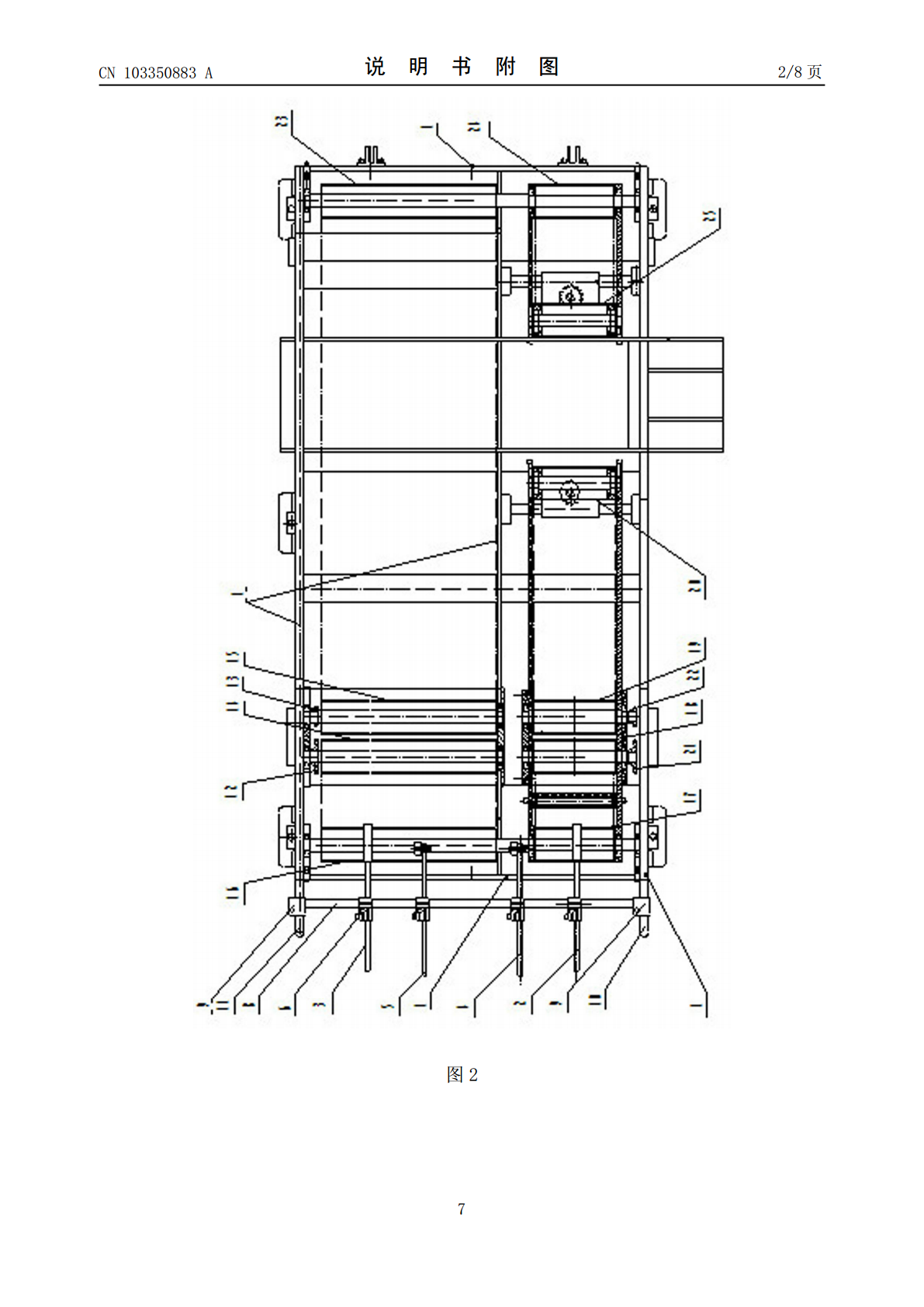
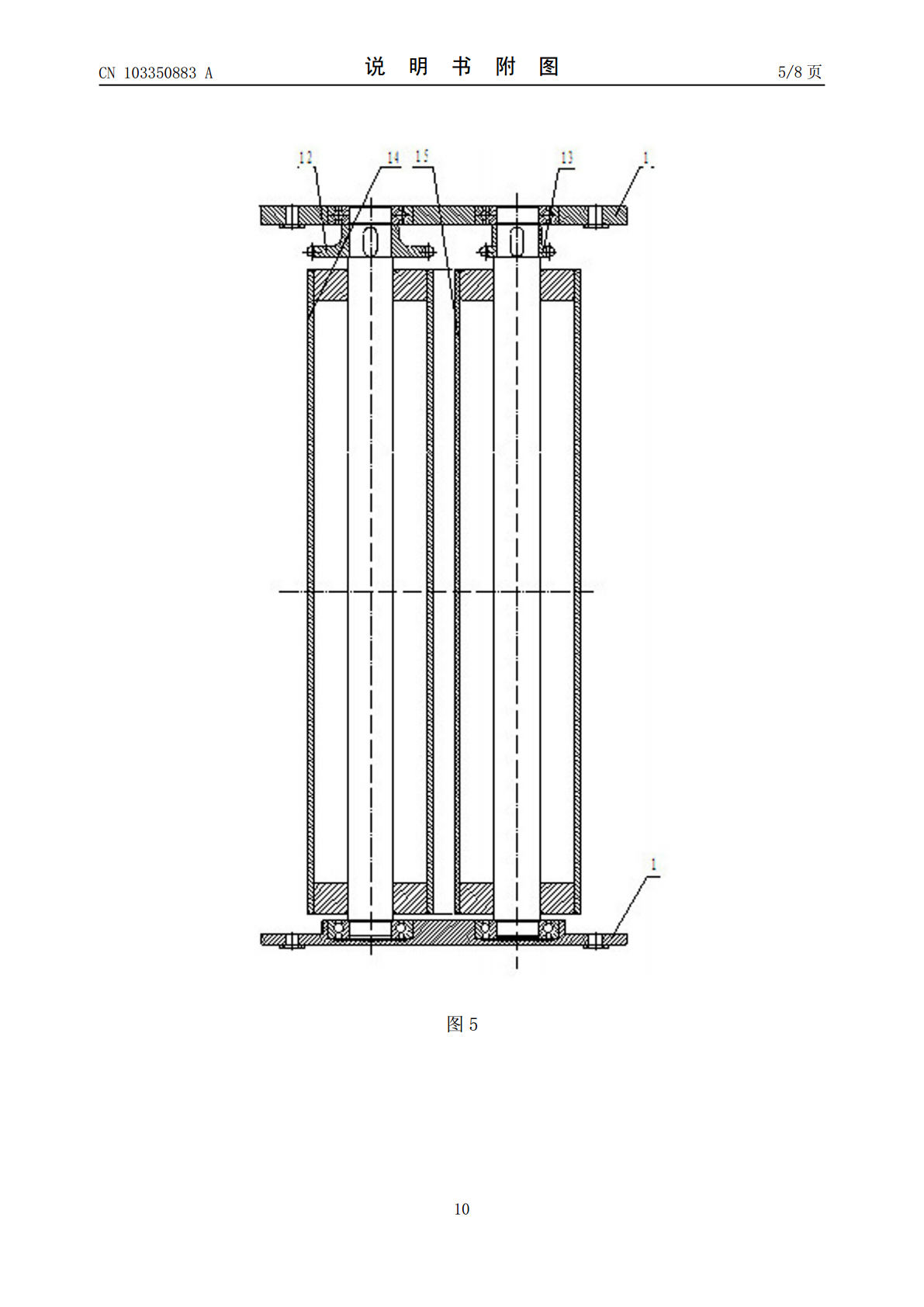
本发明公开了一种全自动纸箱提手穿扣机的纸箱传送装置,包括机架组件、与机架组件固定的上箱组件、固定在机架组件内的输送组件和与机架组件固定的定规组件。采用本发明的技术方案,包装箱体放置在上箱组件中,根据箱体的宽度和高度对上箱组件中的第一上箱支杆和第四上箱支杆、第二上箱支杆和第三上箱支杆高度,再将包装箱体置于输送组件的皮带上,由输送组件将包装箱输送到定规组件进行定位,本发明的技术方案解决了纸箱提手穿扣机的纸箱传送上的技术问题,能够实现纸箱从上箱、输送和定位全自动化,降低了生产成本,极大地提高了生产效率,保证了纸
一种全自动纸箱提手穿扣机的塑料提手定型装置.pdf
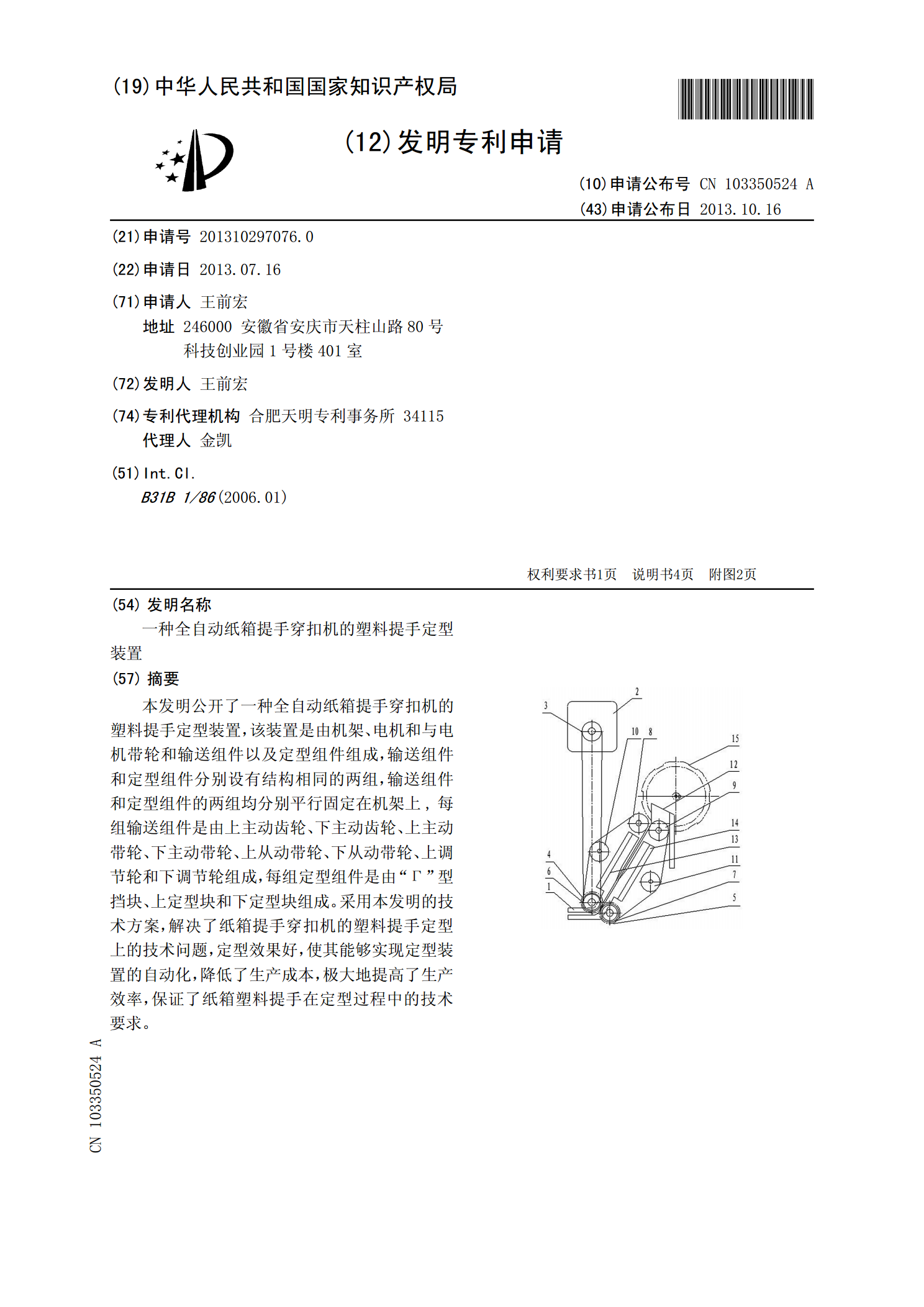
本发明公开了一种全自动纸箱提手穿扣机的塑料提手定型装置,该装置是由机架、电机和与电机带轮和输送组件以及定型组件组成,输送组件和定型组件分别设有结构相同的两组,输送组件和定型组件的两组均分别平行固定在机架上,每组输送组件是由上主动齿轮、下主动齿轮、上主动带轮、下主动带轮、上从动带轮、下从动带轮、上调节轮和下调节轮组成,每组定型组件是由“Г”型挡块、上定型块和下定型块组成。采用本发明的技术方案,解决了纸箱提手穿扣机的塑料提手定型上的技术问题,定型效果好,使其能够实现定型装置的自动化,降低了生产成本,极大地提高
一种全自动纸箱提手穿扣机的塑料提手送料装置.pdf
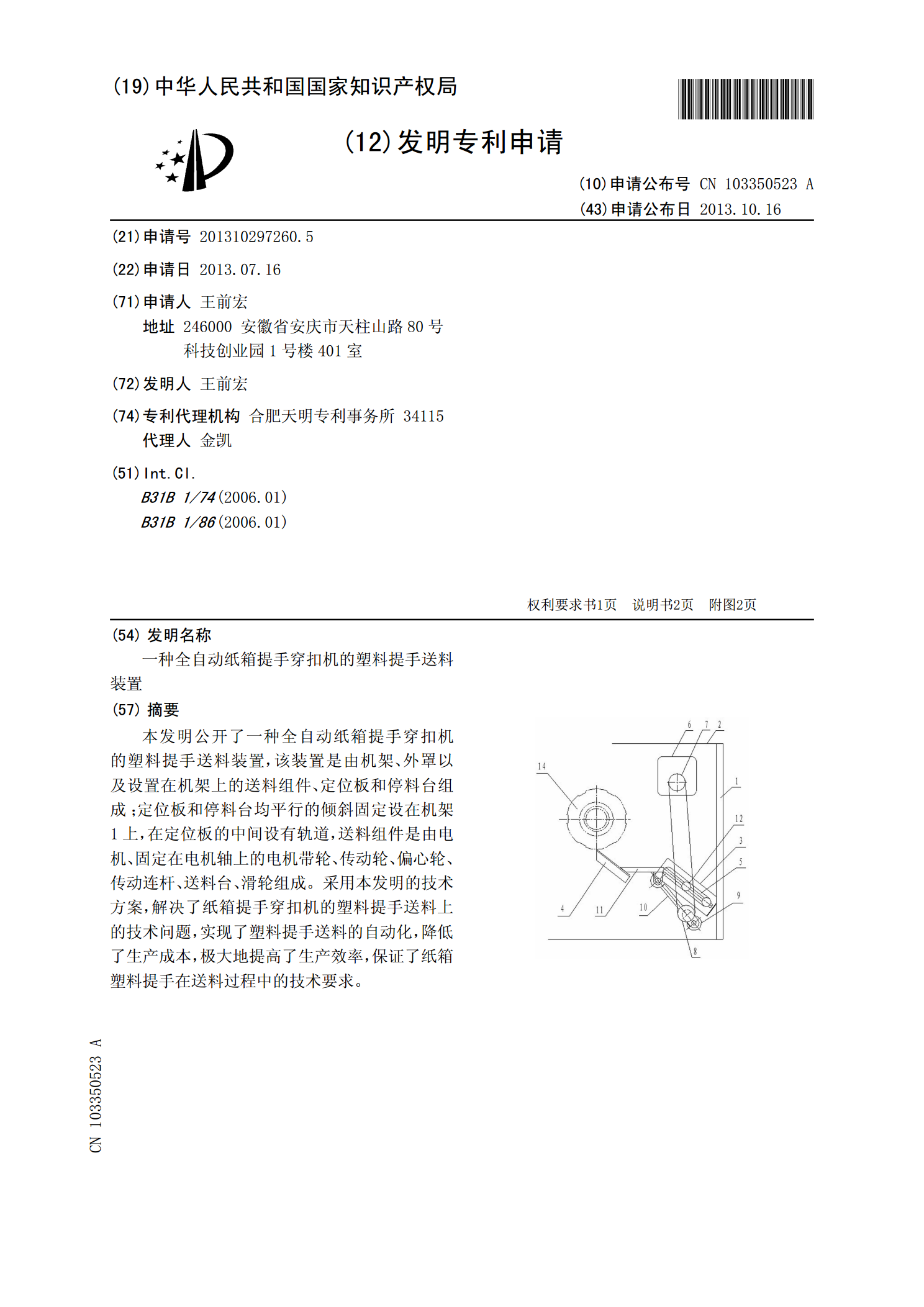
本发明公开了一种全自动纸箱提手穿扣机的塑料提手送料装置,该装置是由机架、外罩以及设置在机架上的送料组件、定位板和停料台组成;定位板和停料台均平行的倾斜固定设在机架1上,在定位板的中间设有轨道,送料组件是由电机、固定在电机轴上的电机带轮、传动轮、偏心轮、传动连杆、送料台、滑轮组成。采用本发明的技术方案,解决了纸箱提手穿扣机的塑料提手送料上的技术问题,实现了塑料提手送料的自动化,降低了生产成本,极大地提高了生产效率,保证了纸箱塑料提手在送料过程中的技术要求。
一种全自动纸箱提手穿扣机的塑料托扣送扣装置.pdf
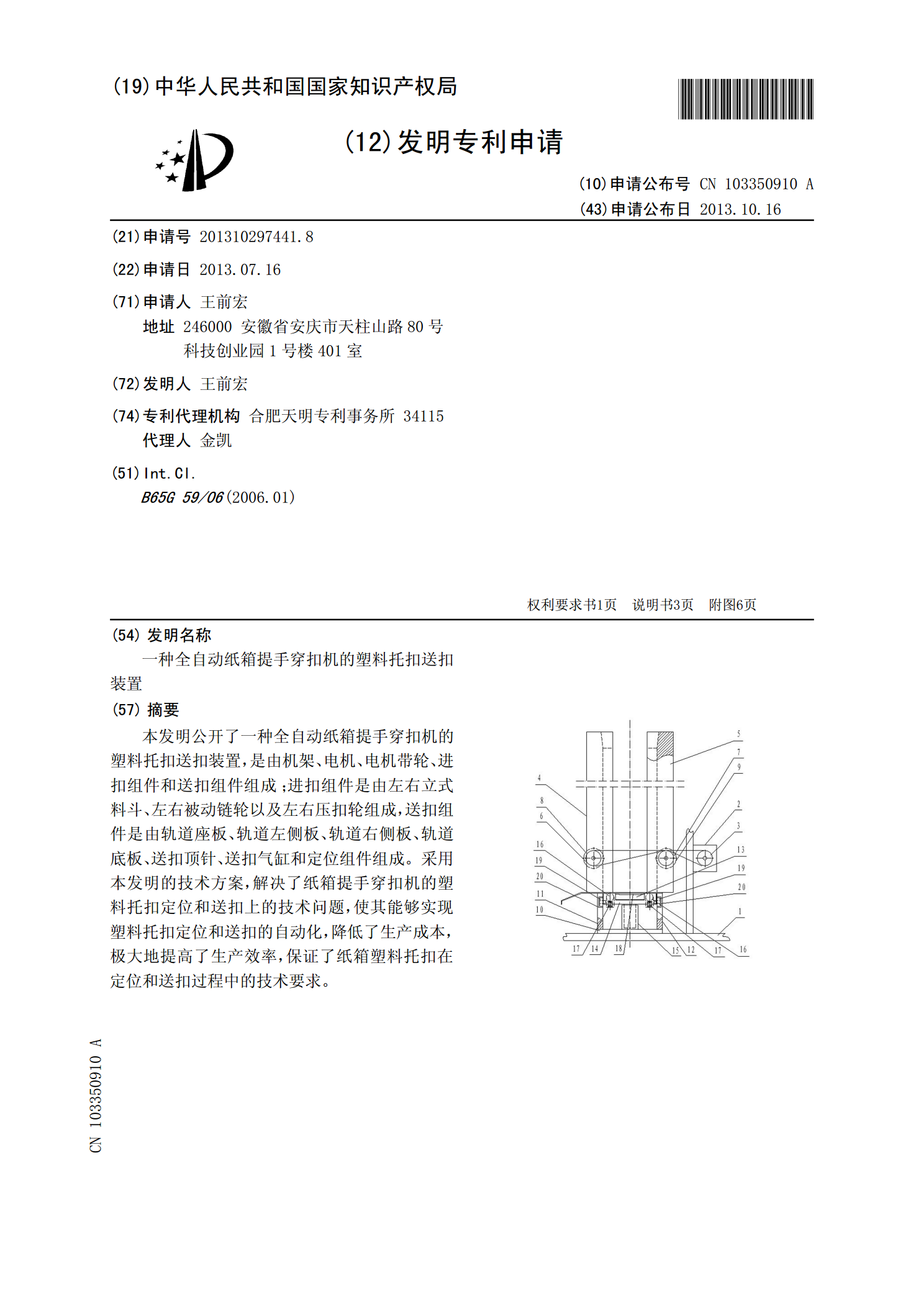
本发明公开了一种全自动纸箱提手穿扣机的塑料托扣送扣装置,是由机架、电机、电机带轮、进扣组件和送扣组件组成;进扣组件是由左右立式料斗、左右被动链轮以及左右压扣轮组成,送扣组件是由轨道座板、轨道左侧板、轨道右侧板、轨道底板、送扣顶针、送扣气缸和定位组件组成。采用本发明的技术方案,解决了纸箱提手穿扣机的塑料托扣定位和送扣上的技术问题,使其能够实现塑料托扣定位和送扣的自动化,降低了生产成本,极大地提高了生产效率,保证了纸箱塑料托扣在定位和送扣过程中的技术要求。
一种纸箱提手穿带机.pdf
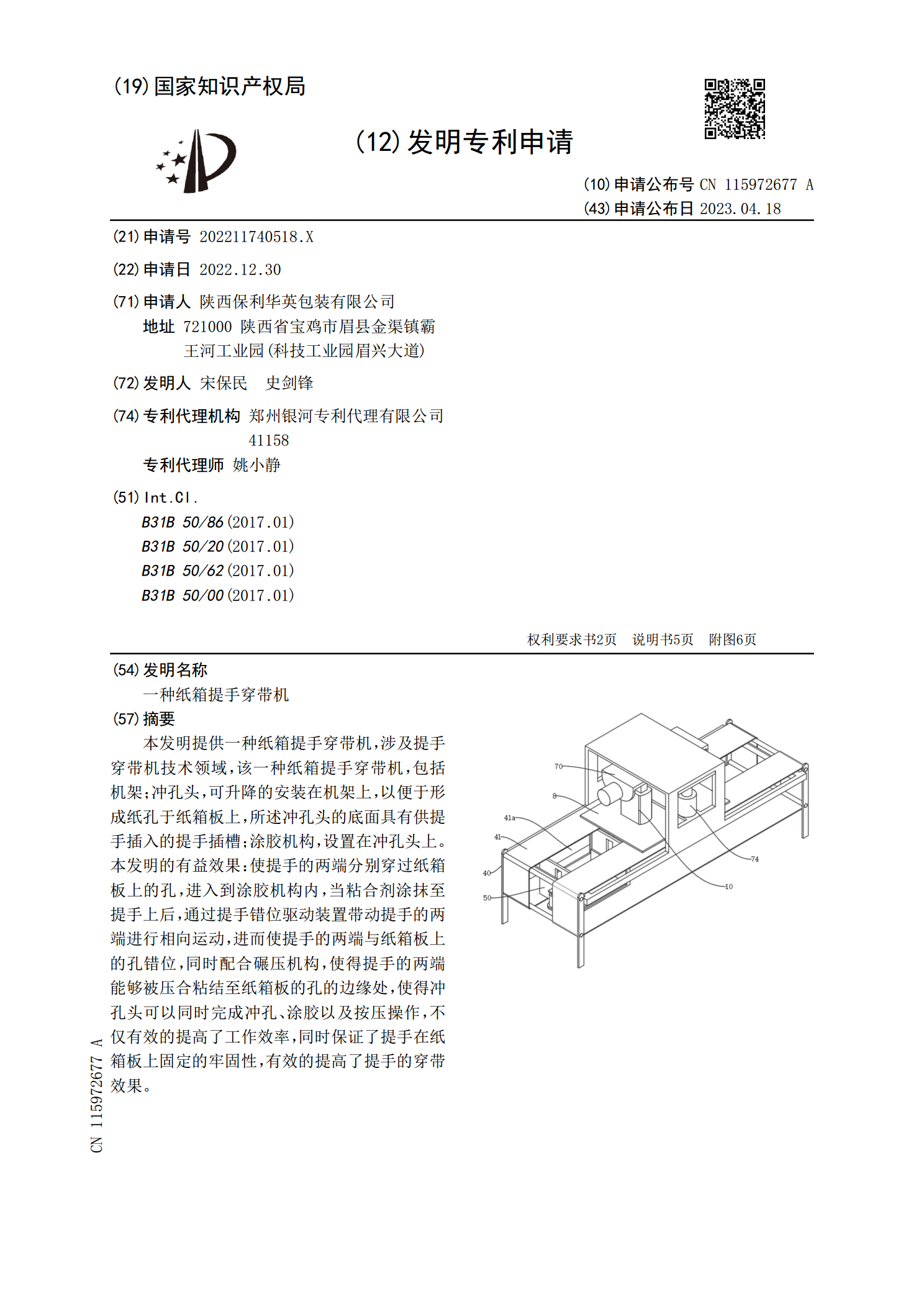
本发明提供一种纸箱提手穿带机,涉及提手穿带机技术领域,该一种纸箱提手穿带机,包括机架;冲孔头,可升降的安装在机架上,以便于形成纸孔于纸箱板上,所述冲孔头的底面具有供提手插入的提手插槽;涂胶机构,设置在冲孔头上。本发明的有益效果:使提手的两端分别穿过纸箱板上的孔,进入到涂胶机构内,当粘合剂涂抹至提手上后,通过提手错位驱动装置带动提手的两端进行相向运动,进而使提手的两端与纸箱板上的孔错位,同时配合碾压机构,使得提手的两端能够被压合粘结至纸箱板的孔的边缘处,使得冲孔头可以同时完成冲孔、涂胶以及按压操作,不仅有效