
基于涡旋光干涉的角度传感装置及测量方法.pdf

小寄****淑k


1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于涡旋光干涉的角度传感装置及测量方法.pdf
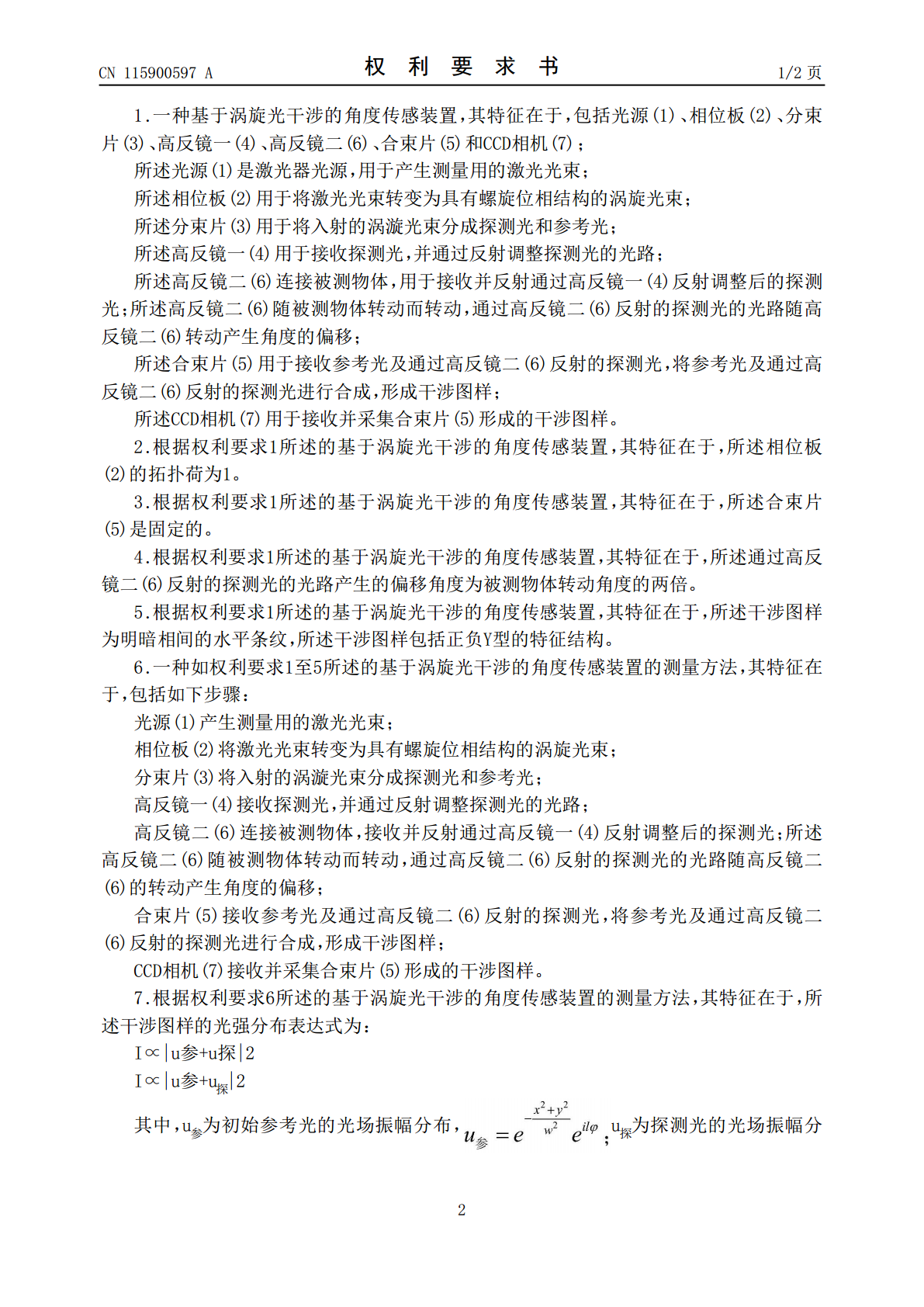
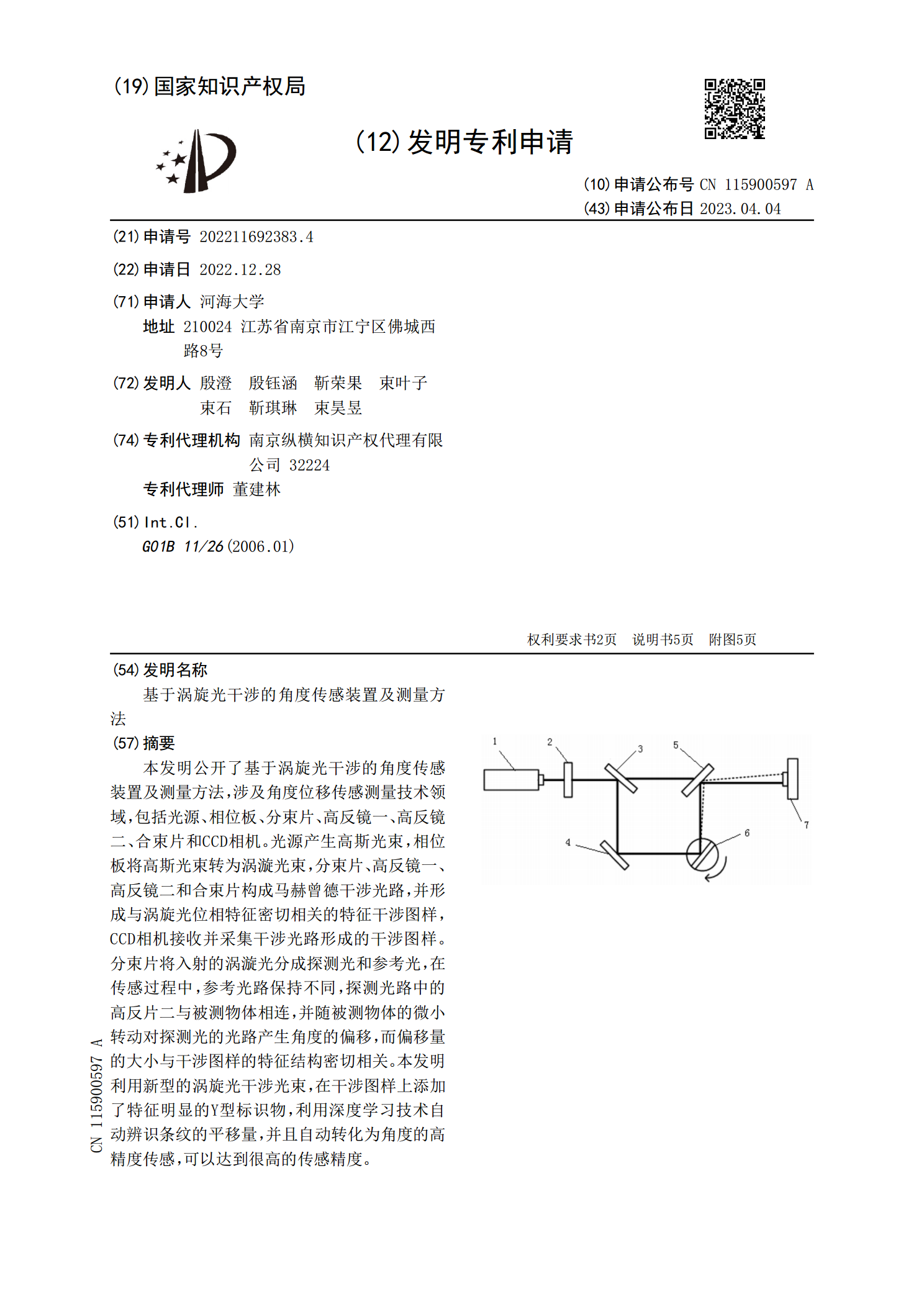
本发明公开了基于涡旋光干涉的角度传感装置及测量方法,涉及角度位移传感测量技术领域,包括光源、相位板、分束片、高反镜一、高反镜二、合束片和CCD相机。光源产生高斯光束,相位板将高斯光束转为涡漩光束,分束片、高反镜一、高反镜二和合束片构成马赫曾德干涉光路,并形成与涡旋光位相特征密切相关的特征干涉图样,CCD相机接收并采集干涉光路形成的干涉图样。分束片将入射的涡漩光分成探测光和参考光,在传感过程中,参考光路保持不同,探测光路中的高反片二与被测物体相连,并随被测物体的微小转动对探测光的光路产生角度的偏移,而偏移量

环形涡旋光干涉叠加形成复合涡旋光的特性研究.docx
环形涡旋光干涉叠加形成复合涡旋光的特性研究标题:环形涡旋光干涉叠加形成复合涡旋光的特性研究摘要:环形涡旋光是一种特殊的光束,其具有旋转相位结构和角动量的特性。本文通过对环形涡旋光干涉叠加形成复合涡旋光的特性进行研究,探索了其在光学领域中的应用潜力和相关理论基础。通过实验和理论分析,本文阐述了环形涡旋光的干涉叠加原理、波面结构和传播性质,并讨论了环形涡旋光的操纵与控制技术,为相关研究提供了理论基础和实验指导。关键词:环形涡旋光;干涉叠加;复合涡旋光;角动量;光学操纵1.引言环形涡旋光是一种具有旋转相位结构的

基于涡旋光与平面波干涉的微位移测量.pptx
,目录PartOnePartTwo涡旋光的产生与特性平面波的干涉现象与原理涡旋光与平面波的干涉机制PartThree微纳制造中的位移测量生物显微成像中的位移测量光学传感中的位移测量其他应用场景PartFour干涉条纹的生成与变化规律位移解调的基本原理与算法位移解调的精度与误差分析位移解调方法的优化策略PartFive实验装置的设计与搭建实验参数的选择与优化实验数据的采集与分析实验结果的验证与误差分析PartSix基于涡旋光与平面波干涉的微位移测量的优势与局限性在不同应用场景下的适用性与局限性分析对未来研究
基于角锥棱镜的对角入射光激光外差干涉测量方法与装置.pdf
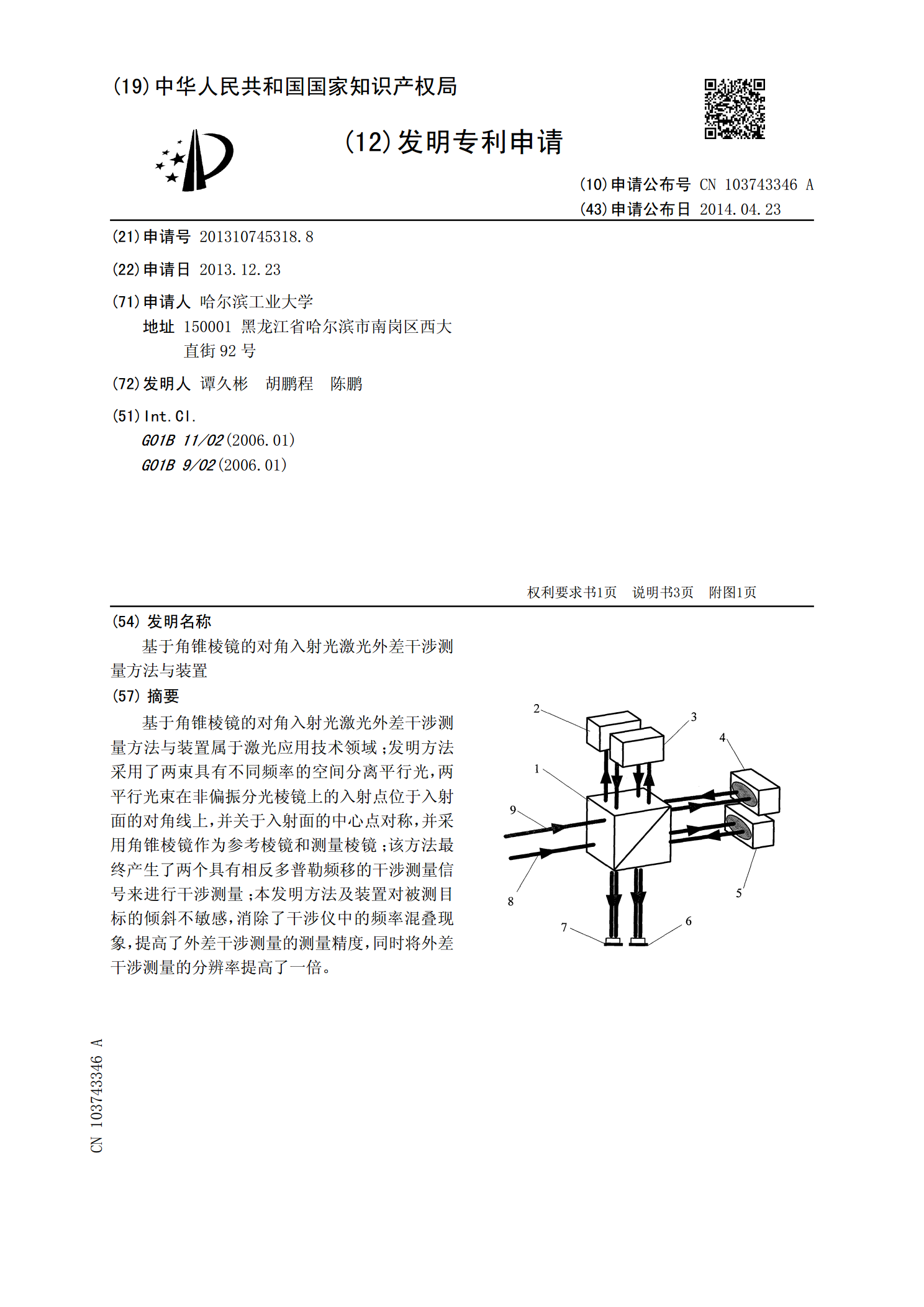
基于角锥棱镜的对角入射光激光外差干涉测量方法与装置属于激光应用技术领域;发明方法采用了两束具有不同频率的空间分离平行光,两平行光束在非偏振分光棱镜上的入射点位于入射面的对角线上,并关于入射面的中心点对称,并采用角锥棱镜作为参考棱镜和测量棱镜;该方法最终产生了两个具有相反多普勒频移的干涉测量信号来进行干涉测量;本发明方法及装置对被测目标的倾斜不敏感,消除了干涉仪中的频率混叠现象,提高了外差干涉测量的测量精度,同时将外差干涉测量的分辨率提高了一倍。

基于直角棱镜的对角入射光激光外差干涉测量方法与装置.pdf
基于直角棱镜的对角入射光激光外差干涉测量方法与装置属于激光应用技术领域;发明方法采用了两束具有不同频率的空间分离平行光,两平行光束在非偏振分光棱镜上的入射点位于入射面的对角线上,并关于入射面的中心点对称,并采用直角棱镜作为参考棱镜和测量棱镜;该方法最终产生了两个具有相反多普勒频移的干涉测量信号来进行干涉测量;本发明方法及装置消除了干涉仪中的频率混叠现象,提高了外差干涉测量的测量精度,同时将外差干涉测量的分辨率提高了一倍。