
一种多工位可移位机器人夹具.pdf

猫巷****志敏

1/8
2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多工位可移位机器人夹具.pdf
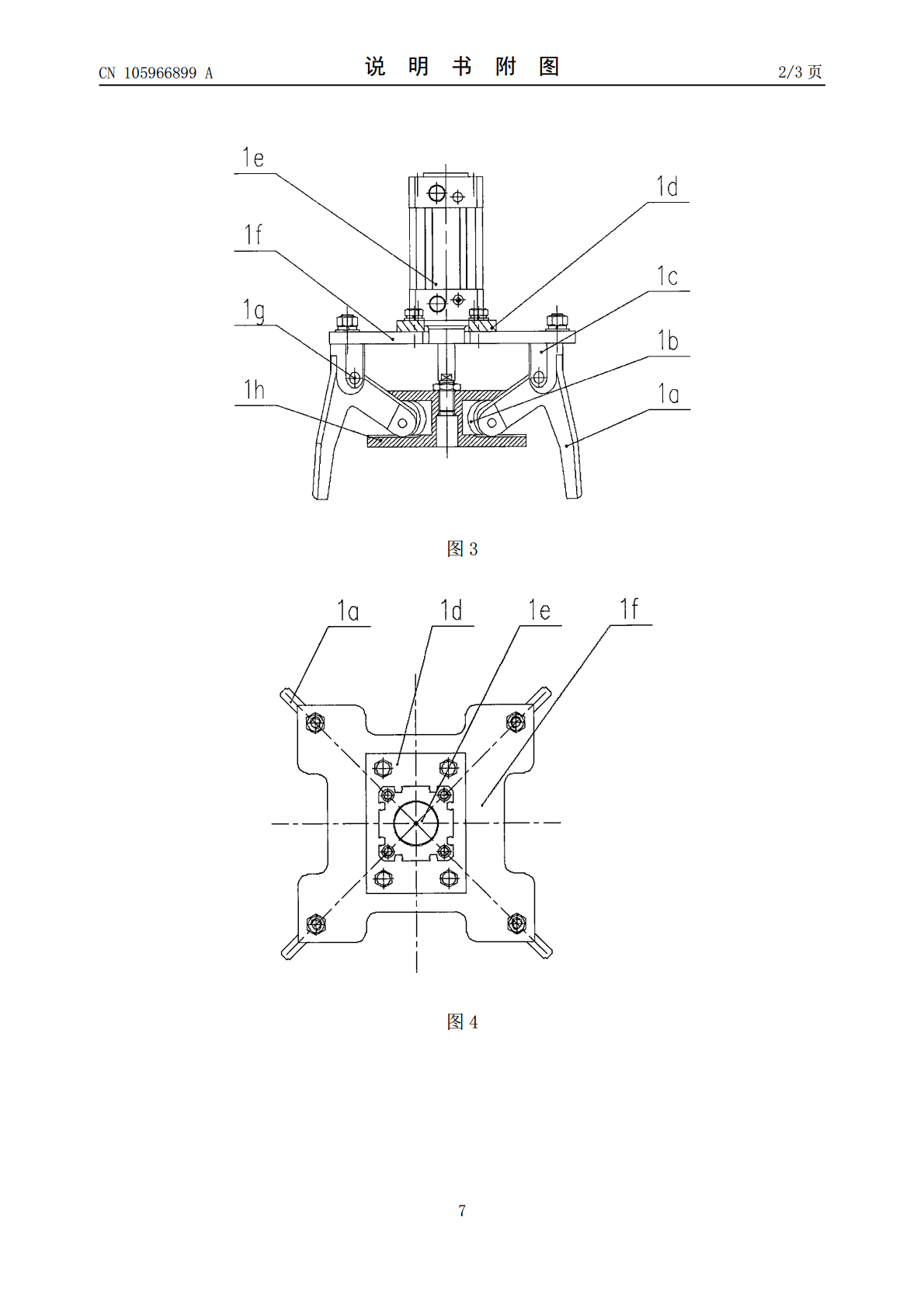
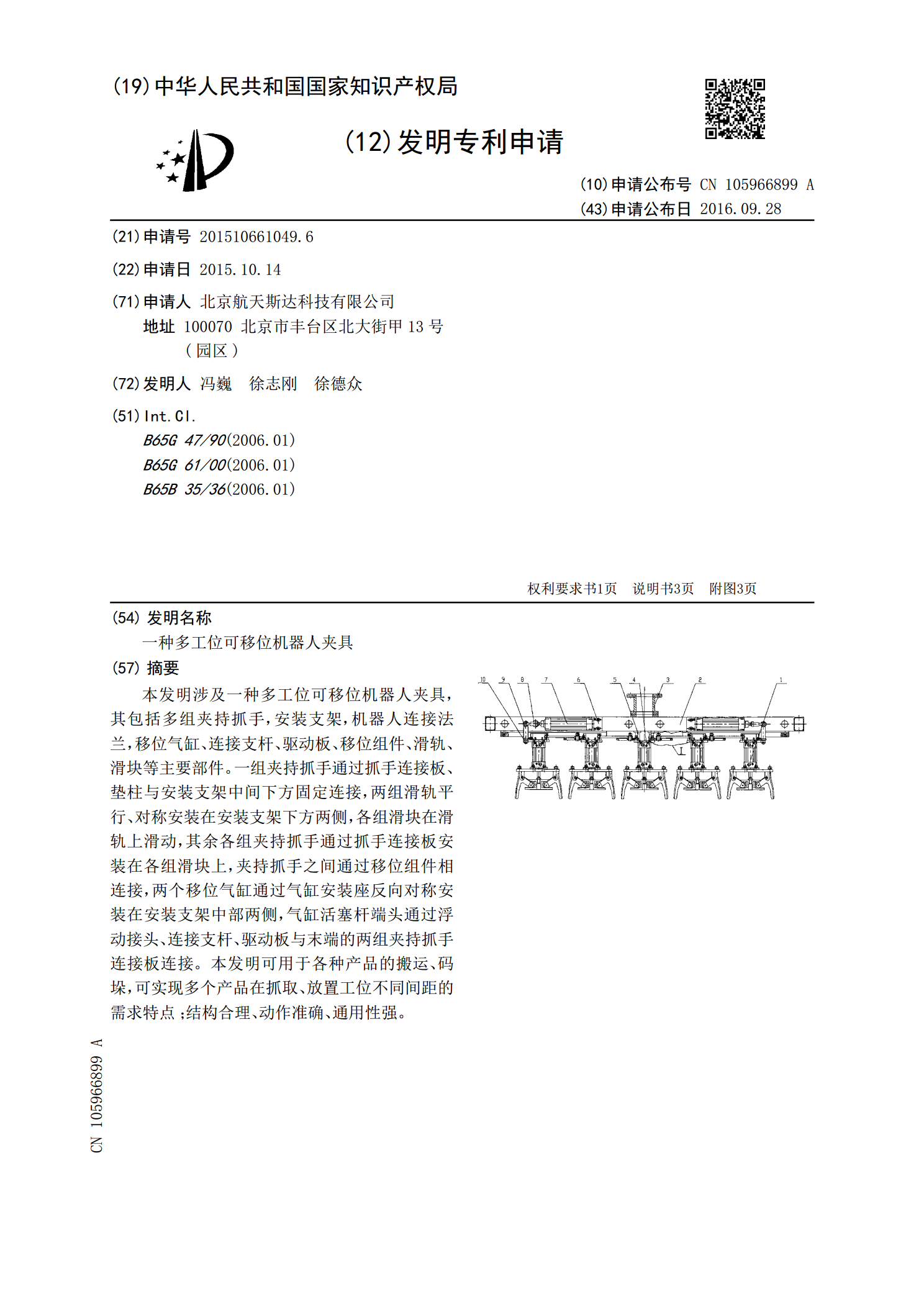
本发明涉及一种多工位可移位机器人夹具,其包括多组夹持抓手,安装支架,机器人连接法兰,移位气缸、连接支杆、驱动板、移位组件、滑轨、滑块等主要部件。一组夹持抓手通过抓手连接板、垫柱与安装支架中间下方固定连接,两组滑轨平行、对称安装在安装支架下方两侧,各组滑块在滑轨上滑动,其余各组夹持抓手通过抓手连接板安装在各组滑块上,夹持抓手之间通过移位组件相连接,两个移位气缸通过气缸安装座反向对称安装在安装支架中部两侧,气缸活塞杆端头通过浮动接头、连接支杆、驱动板与末端的两组夹持抓手连接板连接。本发明可用于各种产品的搬运、
一种多工位组合夹具.pdf
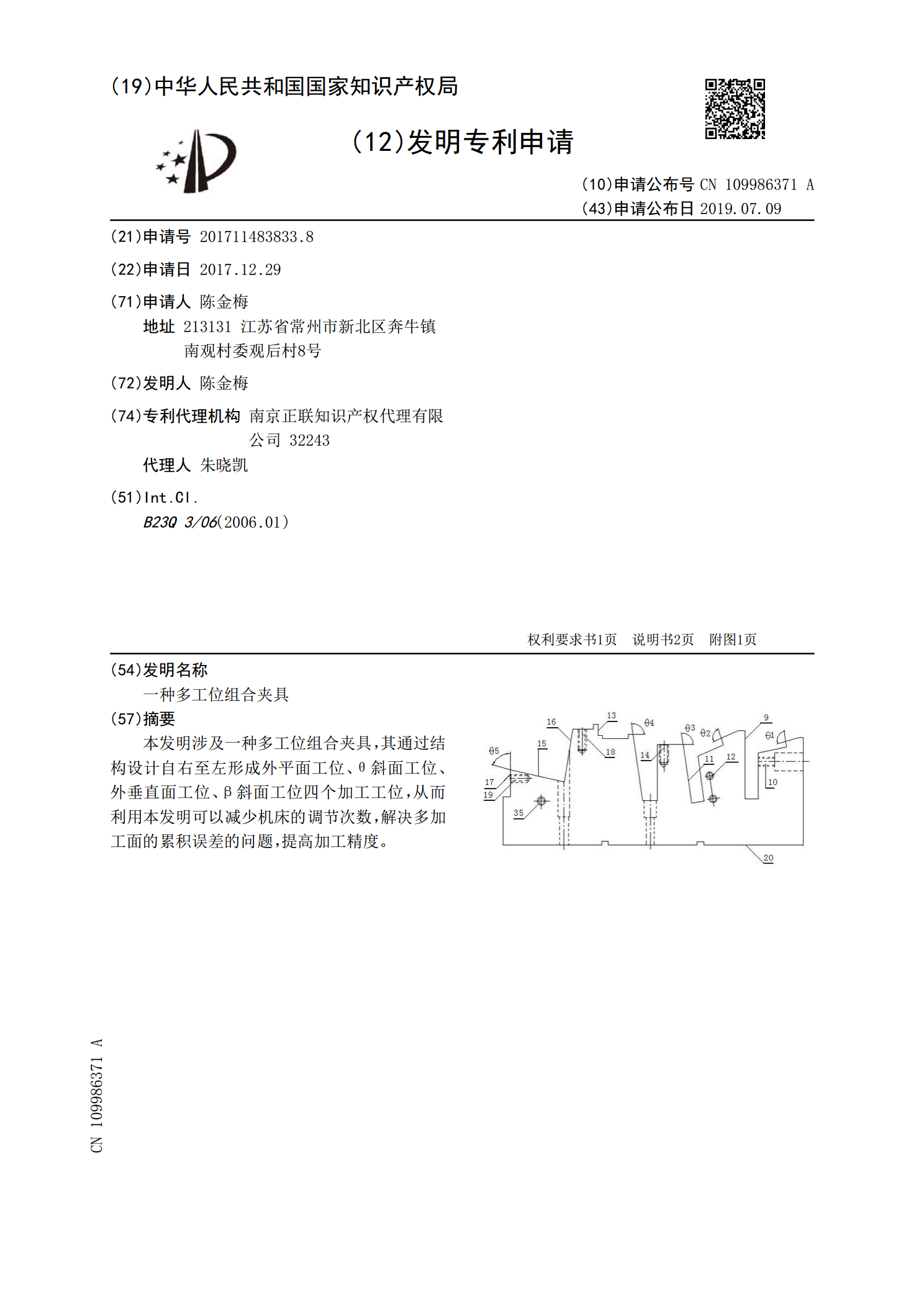
本发明涉及一种多工位组合夹具,其通过结构设计自右至左形成外平面工位、θ斜面工位、外垂直面工位、β斜面工位四个加工工位,从而利用本发明可以减少机床的调节次数,解决多加工面的累积误差的问题,提高加工精度。
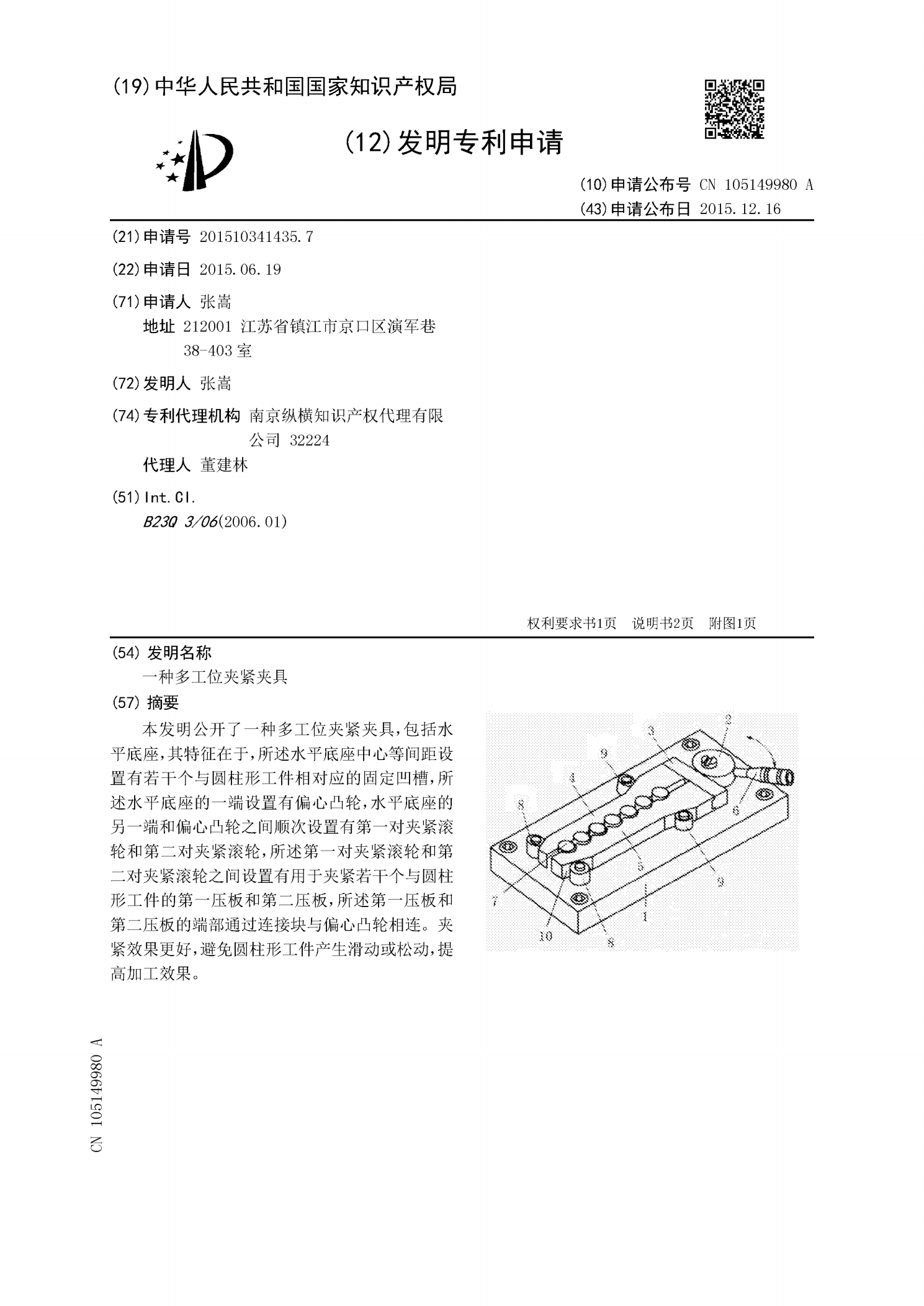
一种多工位夹紧夹具.pdf
本发明公开了一种多工位夹紧夹具,包括水平底座,其特征在于,所述水平底座中心等间距设置有若干个与圆柱形工件相对应的固定凹槽,所述水平底座的一端设置有偏心凸轮,水平底座的另一端和偏心凸轮之间顺次设置有第一对夹紧滚轮和第二对夹紧滚轮,所述第一对夹紧滚轮和第二对夹紧滚轮之间设置有用于夹紧若干个与圆柱形工件的第一压板和第二压板,所述第一压板和第二压板的端部通过连接块与偏心凸轮相连。夹紧效果更好,避免圆柱形工件产生滑动或松动,提高加工效果。
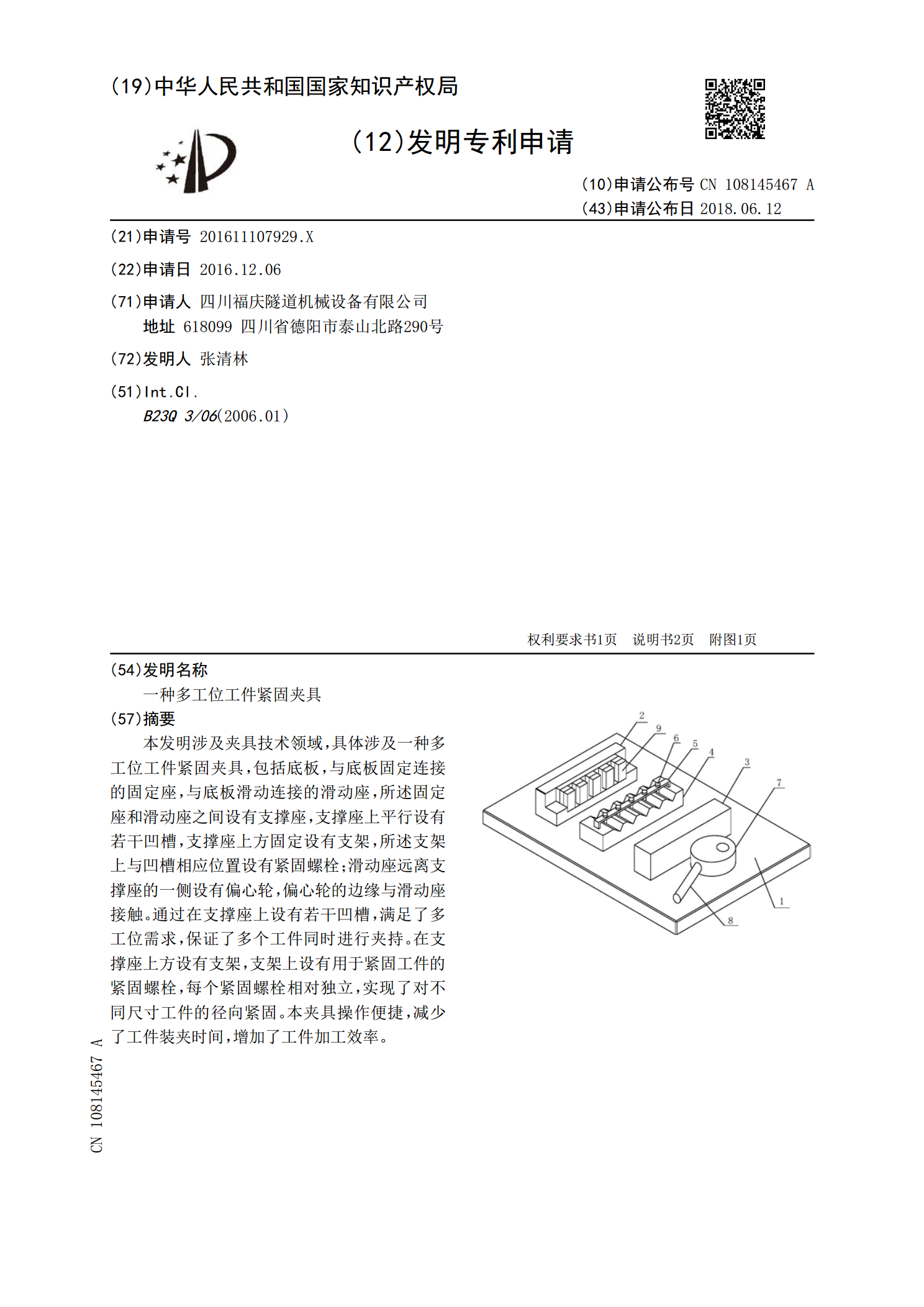
一种多工位工件紧固夹具.pdf
本发明涉及夹具技术领域,具体涉及一种多工位工件紧固夹具,包括底板,与底板固定连接的固定座,与底板滑动连接的滑动座,所述固定座和滑动座之间设有支撑座,支撑座上平行设有若干凹槽,支撑座上方固定设有支架,所述支架上与凹槽相应位置设有紧固螺栓;滑动座远离支撑座的一侧设有偏心轮,偏心轮的边缘与滑动座接触。通过在支撑座上设有若干凹槽,满足了多工位需求,保证了多个工件同时进行夹持。在支撑座上方设有支架,支架上设有用于紧固工件的紧固螺栓,每个紧固螺栓相对独立,实现了对不同尺寸工件的径向紧固。本夹具操作便捷,减少了工件装夹
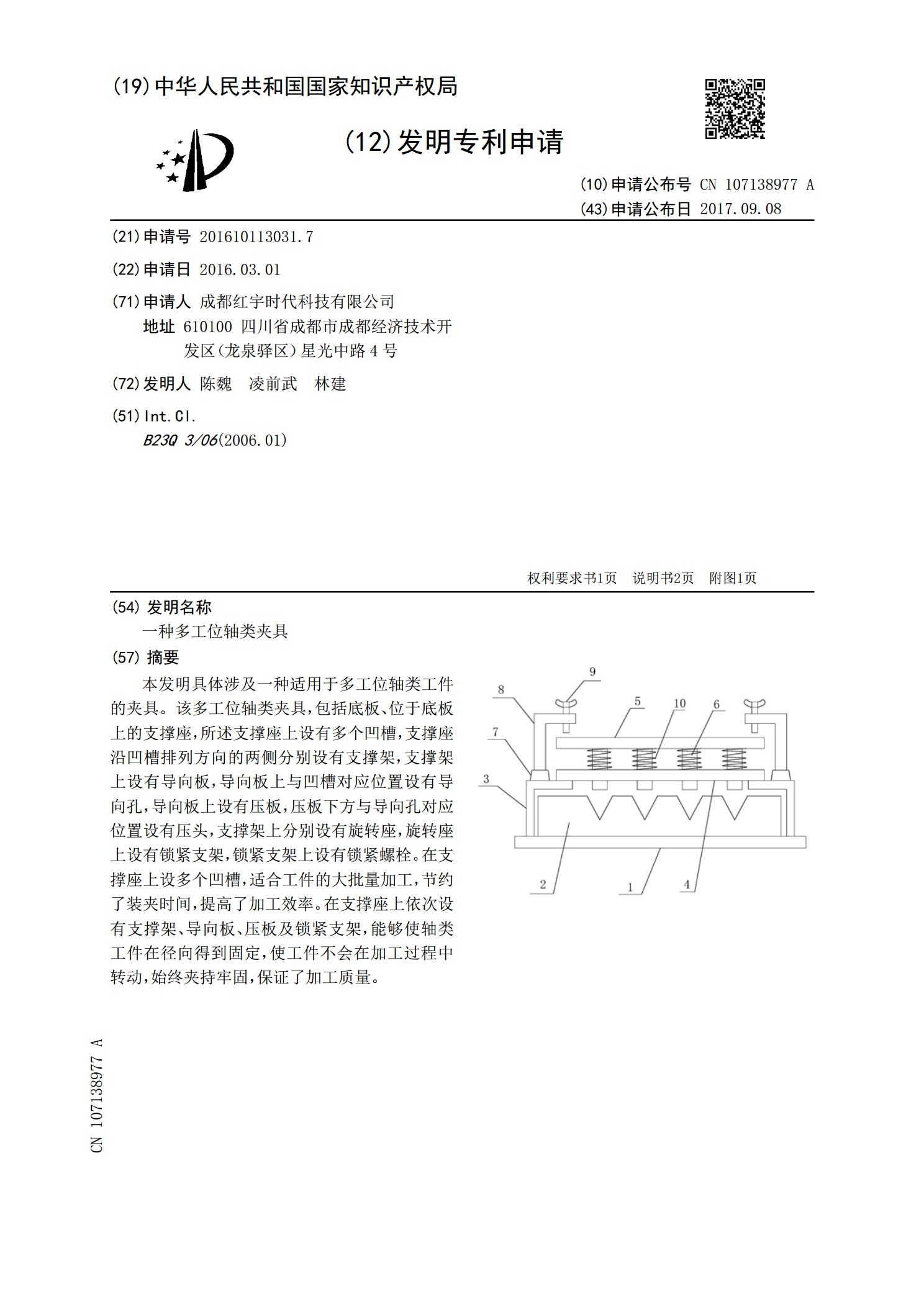
一种多工位轴类夹具.pdf
本发明具体涉及一种适用于多工位轴类工件的夹具。该多工位轴类夹具,包括底板、位于底板上的支撑座,所述支撑座上设有多个凹槽,支撑座沿凹槽排列方向的两侧分别设有支撑架,支撑架上设有导向板,导向板上与凹槽对应位置设有导向孔,导向板上设有压板,压板下方与导向孔对应位置设有压头,支撑架上分别设有旋转座,旋转座上设有锁紧支架,锁紧支架上设有锁紧螺栓。在支撑座上设多个凹槽,适合工件的大批量加工,节约了装夹时间,提高了加工效率。在支撑座上依次设有支撑架、导向板、压板及锁紧支架,能够使轴类工件在径向得到固定,使工件不会在加工