
一种可重构机械臂事件触发分散最优容错控制方法及系统.pdf

茂学****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可重构机械臂事件触发分散最优容错控制方法及系统.pdf
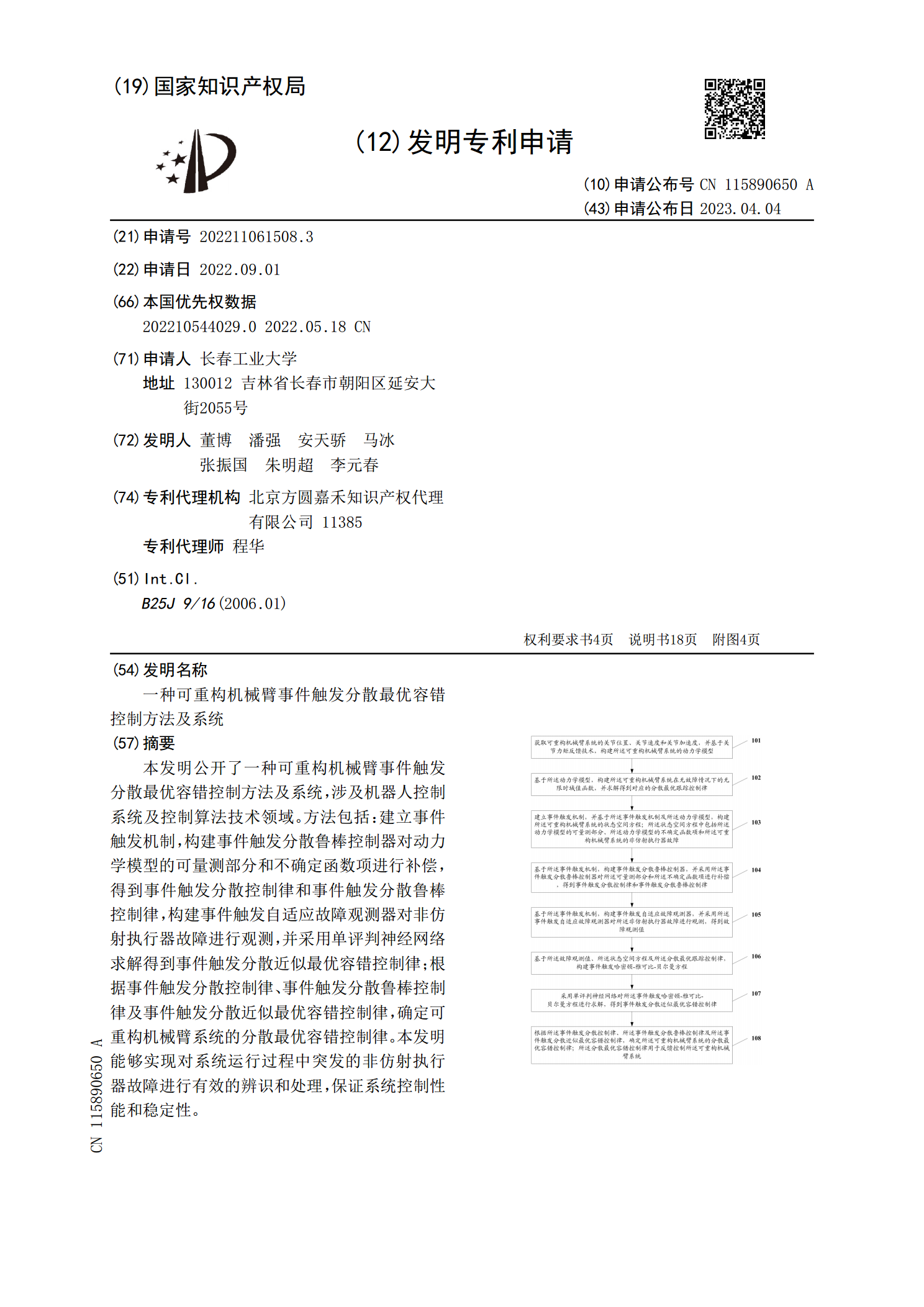
本发明公开了一种可重构机械臂事件触发分散最优容错控制方法及系统,涉及机器人控制系统及控制算法技术领域。方法包括:建立事件触发机制,构建事件触发分散鲁棒控制器对动力学模型的可量测部分和不确定函数项进行补偿,得到事件触发分散控制律和事件触发分散鲁棒控制律,构建事件触发自适应故障观测器对非仿射执行器故障进行观测,并采用单评判神经网络求解得到事件触发分散近似最优容错控制律;根据事件触发分散控制律、事件触发分散鲁棒控制律及事件触发分散近似最优容错控制律,确定可重构机械臂系统的分散最优容错控制律。本发明能够实现对系统
多故障并发的可重构模块机械臂分散容错控制方法研究.pptx
汇报人:目录PARTONEPARTTWO机械臂的定义和分类机械臂的应用领域机械臂的发展趋势PARTTHREE可重构模块机械臂的定义和特点可重构模块机械臂的结构和组成可重构模块机械臂的国内外研究现状PARTFOUR故障诊断与容错控制技术概述多故障并发的可重构模块机械臂分散容错控制方法的设计与实现分散容错控制方法的性能评估和实验验证PARTFIVE实验设置与实验过程实验结果展示与分析结果对比与讨论PARTSIX研究成果总结对未来研究的建议和展望THANKYOU

基于事件触发的系统同步与容错控制研究.docx
基于事件触发的系统同步与容错控制研究基于事件触发的系统同步与容错控制研究摘要:在分布式系统中,系统同步和容错控制是两个关键的研究方向。事件触发是一种常用的同步机制,它可以在系统中随着事件发生进行同步操作。然而,由于分布式系统中存在网络延迟、节点故障等问题,系统容错性成为了一个难题。本文针对基于事件触发的系统同步和容错控制进行研究,分析了目前的研究现状,总结了常用的方法和技术,提出了一种新的解决方案,并对其进行了实验评估。关键词:事件触发、系统同步、容错控制、分布式系统1.引言随着分布式系统的快速发展,系统
基于分段阈值事件触发的机械臂预设性能控制方法.pdf
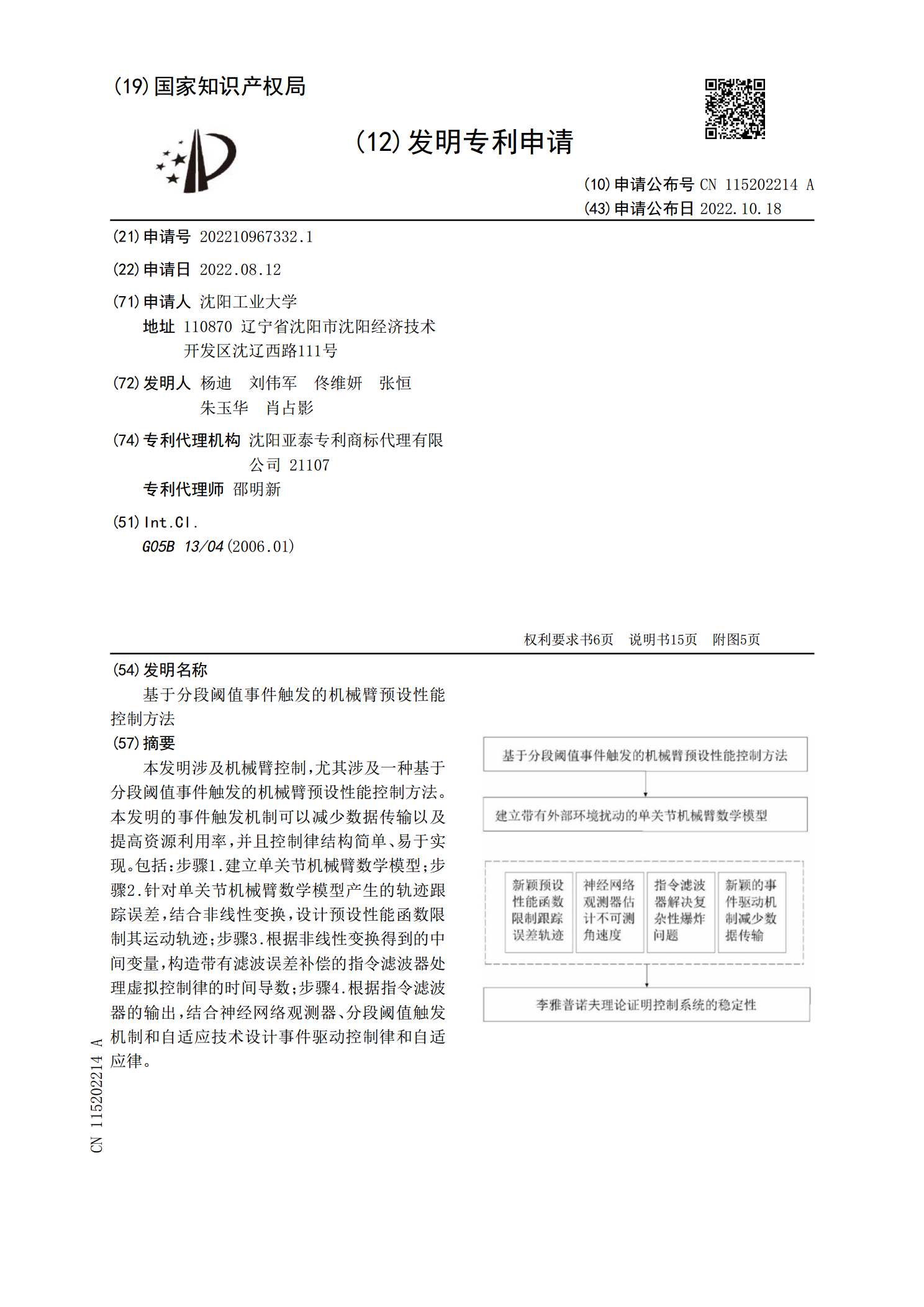
本发明涉及机械臂控制,尤其涉及一种基于分段阈值事件触发的机械臂预设性能控制方法。本发明的事件触发机制可以减少数据传输以及提高资源利用率,并且控制律结构简单、易于实现。包括:步骤1.建立单关节机械臂数学模型;步骤2.针对单关节机械臂数学模型产生的轨迹跟踪误差,结合非线性变换,设计预设性能函数限制其运动轨迹;步骤3.根据非线性变换得到的中间变量,构造带有滤波误差补偿的指令滤波器处理虚拟控制律的时间导数;步骤4.根据指令滤波器的输出,结合神经网络观测器、分段阈值触发机制和自适应技术设计事件驱动控制律和自适应律。

不确定非线性系统的容错与事件触发控制方法研究.doc
不确定非线性系统的容错与事件触发控制方法研究随着现代系统的日趋复杂,以及动态系统模型不确定性的普遍存在,系统可靠性和安全性越来越受到人们的重视。然而,系统在实际运行过程中,执行器、传感器或系统的其它元部件不可避免的发生故障。一旦系统发生故障,可能导致系统性能恶化或系统变得不稳定,甚至会导致意想不到的灾难性事故。如何设计有效的容错控制来确保整个系统的稳定性成为一个具有重要意义的研究课题。另一方面,随着网络通信技术的迅猛发展,网络传输的数据量也越来越大,传统的时间触发控制方法由于在等间隔的离散时刻点上周期性地