
一种基于时滞补偿的风洞支杆抑振方法.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于时滞补偿的风洞支杆抑振方法.pdf
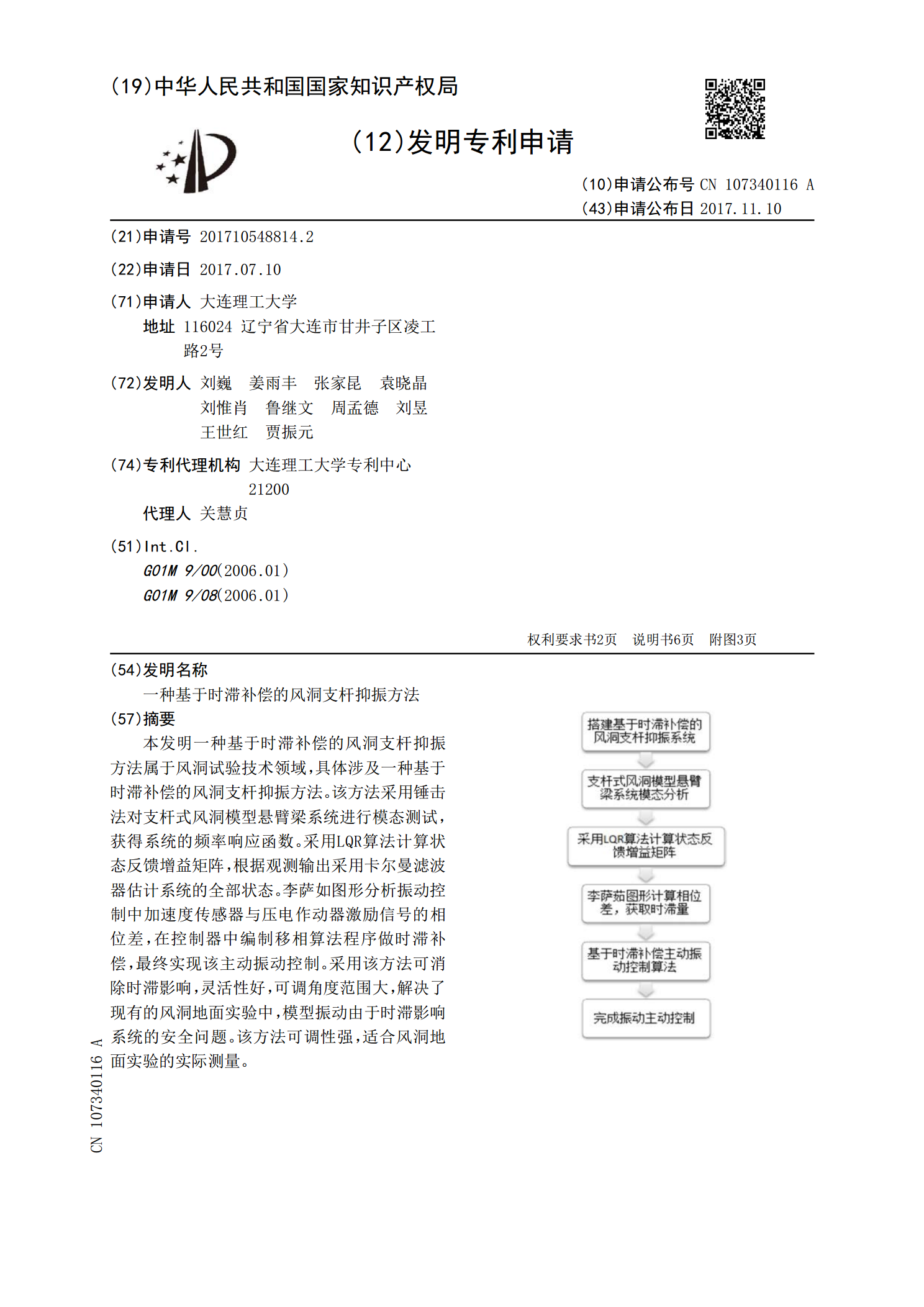
本发明一种基于时滞补偿的风洞支杆抑振方法属于风洞试验技术领域,具体涉及一种基于时滞补偿的风洞支杆抑振方法。该方法采用锤击法对支杆式风洞模型悬臂梁系统进行模态测试,获得系统的频率响应函数。采用LQR算法计算状态反馈增益矩阵,根据观测输出采用卡尔曼滤波器估计系统的全部状态。李萨如图形分析振动控制中加速度传感器与压电作动器激励信号的相位差,在控制器中编制移相算法程序做时滞补偿,最终实现该主动振动控制。采用该方法可消除时滞影响,灵活性好,可调角度范围大,解决了现有的风洞地面实验中,模型振动由于时滞影响系统的安全问
一种风洞支杆的前后置抑振器协同抑振方法.pdf
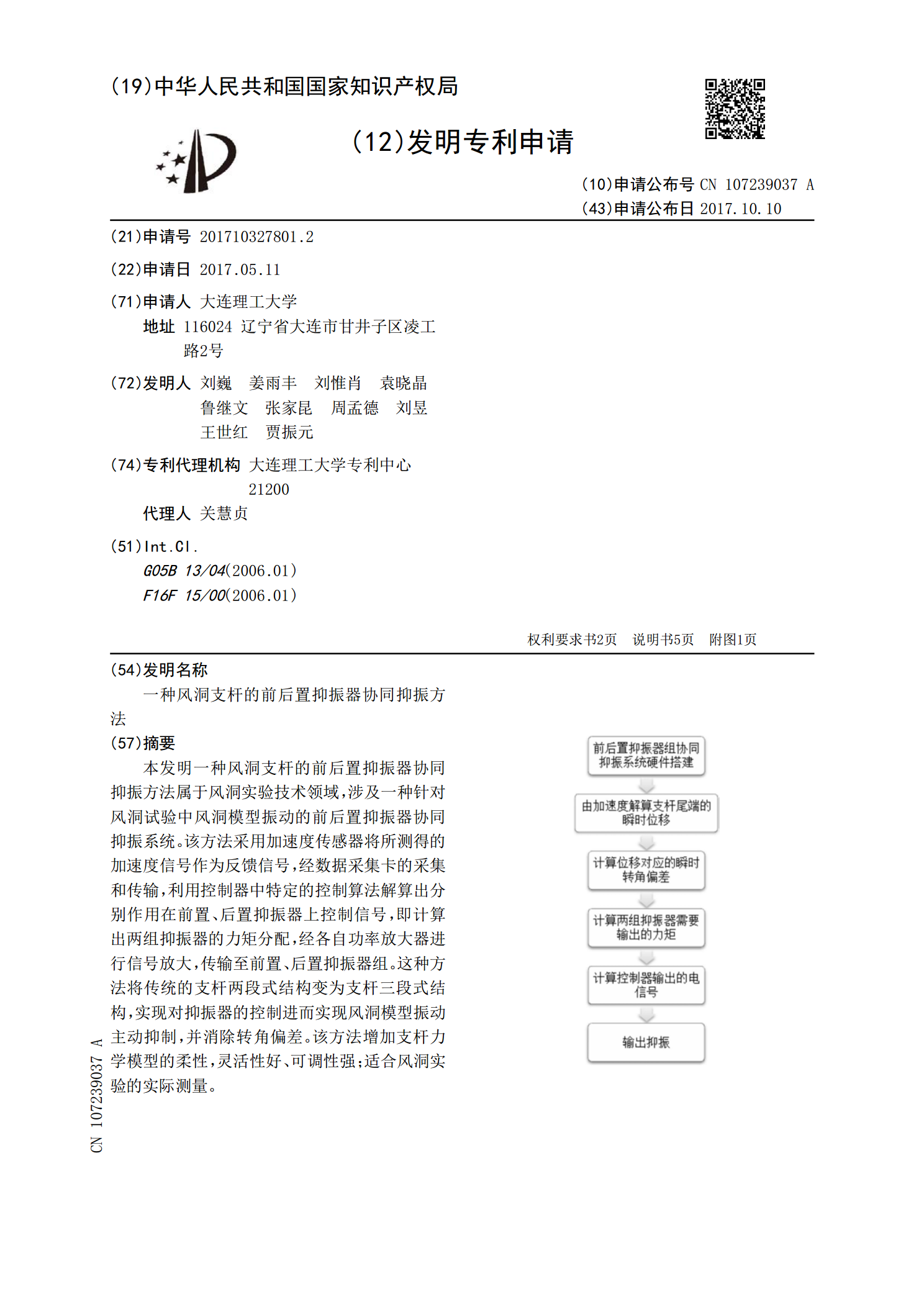
本发明一种风洞支杆的前后置抑振器协同抑振方法属于风洞实验技术领域,涉及一种针对风洞试验中风洞模型振动的前后置抑振器协同抑振系统。该方法采用加速度传感器将所测得的加速度信号作为反馈信号,经数据采集卡的采集和传输,利用控制器中特定的控制算法解算出分别作用在前置、后置抑振器上控制信号,即计算出两组抑振器的力矩分配,经各自功率放大器进行信号放大,传输至前置、后置抑振器组。这种方法将传统的支杆两段式结构变为支杆三段式结构,实现对抑振器的控制进而实现风洞模型振动主动抑制,并消除转角偏差。该方法增加支杆力学模型的柔性,
基于平滑预测策略的多传感器风洞支杆抑振方法.pdf
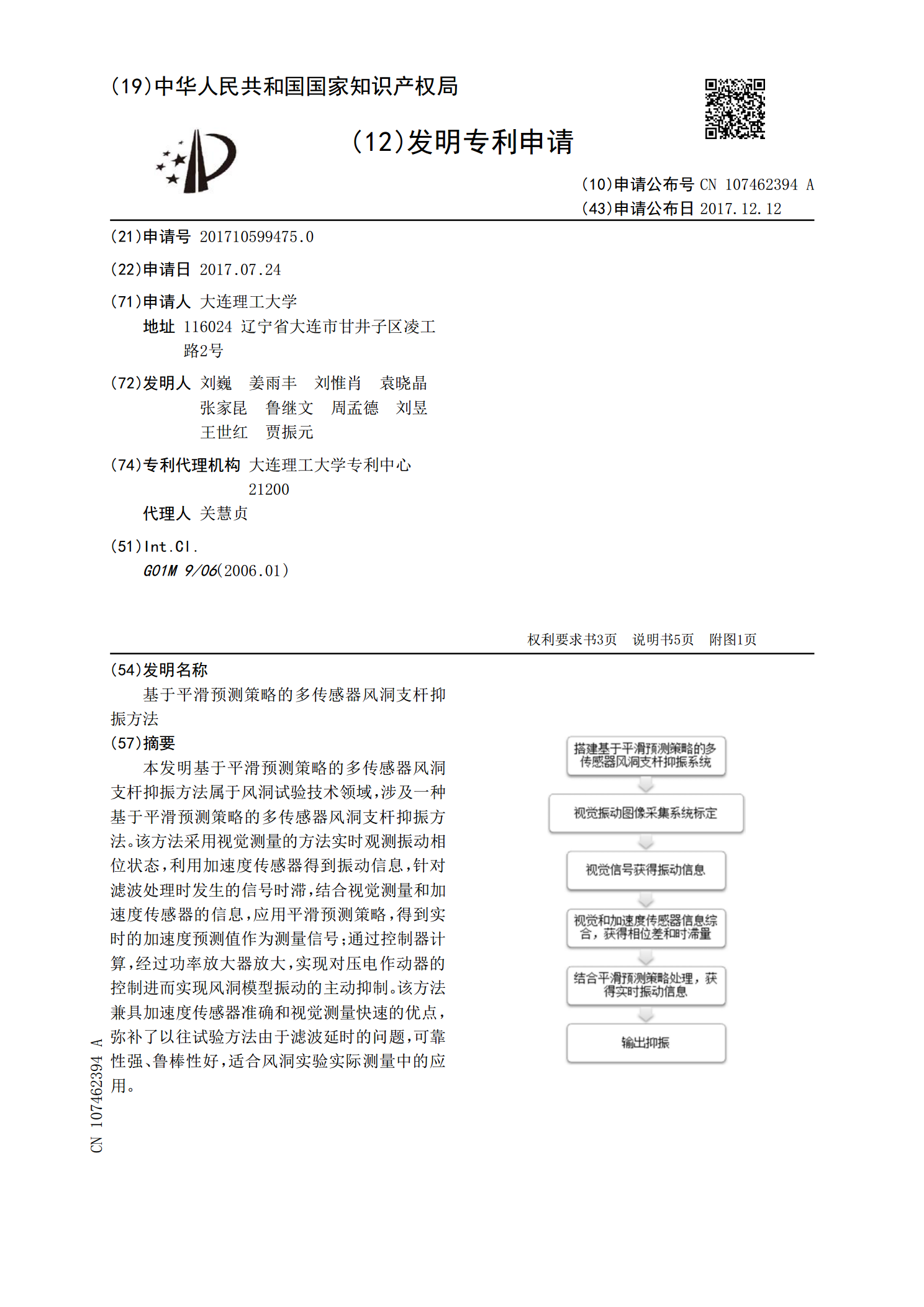
本发明基于平滑预测策略的多传感器风洞支杆抑振方法属于风洞试验技术领域,涉及一种基于平滑预测策略的多传感器风洞支杆抑振方法。该方法采用视觉测量的方法实时观测振动相位状态,利用加速度传感器得到振动信息,针对滤波处理时发生的信号时滞,结合视觉测量和加速度传感器的信息,应用平滑预测策略,得到实时的加速度预测值作为测量信号;通过控制器计算,经过功率放大器放大,实现对压电作动器的控制进而实现风洞模型振动的主动抑制。该方法兼具加速度传感器准确和视觉测量快速的优点,弥补了以往试验方法由于滤波延时的问题,可靠性强、鲁棒性好

基于模糊和比例微分控制动态切换的风洞支杆抑振方法.pdf
本发明基于模糊和比例微分控制动态切换的风洞支杆抑振方法,属于风洞试验技术领域,涉及一种基于模糊和比例微分控制动态切换的风洞支杆抑振方法。该方法采用模糊控制和PD控制算法在一定的条件下进行动态切换,使用模糊控制对能量快速增加的情况进行控制,使用PD控制对已经将能量控制到一定水平下的情况进行继续控制。利用加速度传感器得到代表振动的信号作为反馈信号,通过控制器计算,经过功率放大器放大,实现对压电作动器的控制进而实现风洞模型振动主动抑制。该方法兼具模糊控制快速和PD控制准确的优点,弥补了以往试验方法由于控制不够快
一种风洞主动抑振支杆压电陶瓷驱动器预紧方法.pdf
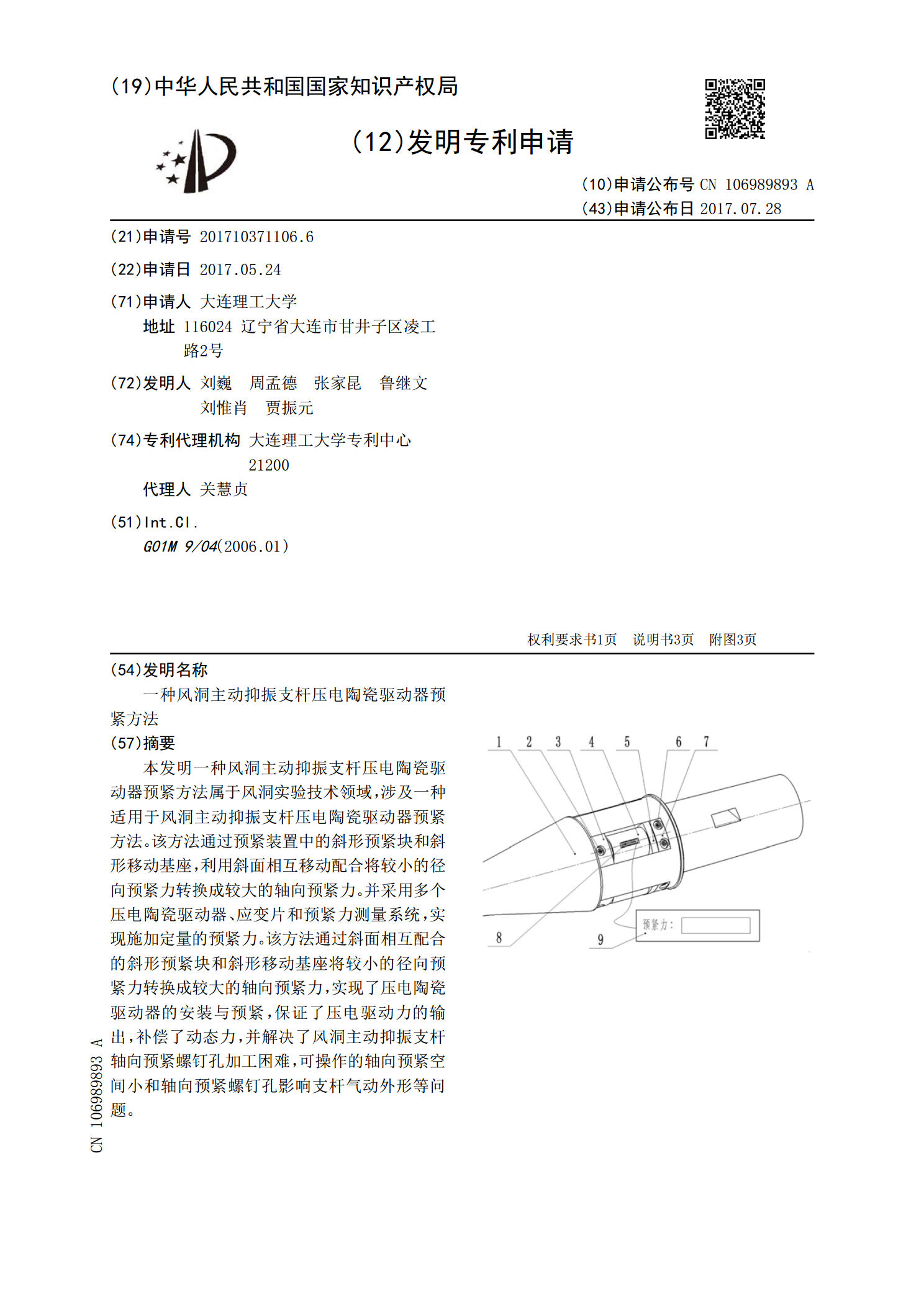
本发明一种风洞主动抑振支杆压电陶瓷驱动器预紧方法属于风洞实验技术领域,涉及一种适用于风洞主动抑振支杆压电陶瓷驱动器预紧方法。该方法通过预紧装置中的斜形预紧块和斜形移动基座,利用斜面相互移动配合将较小的径向预紧力转换成较大的轴向预紧力。并采用多个压电陶瓷驱动器、应变片和预紧力测量系统,实现施加定量的预紧力。该方法通过斜面相互配合的斜形预紧块和斜形移动基座将较小的径向预紧力转换成较大的轴向预紧力,实现了压电陶瓷驱动器的安装与预紧,保证了压电驱动力的输出,补偿了动态力,并解决了风洞主动抑振支杆轴向预紧螺钉孔加工