
一种冲压模具机械手.pdf

一只****爱敏

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种冲压模具机械手.pdf
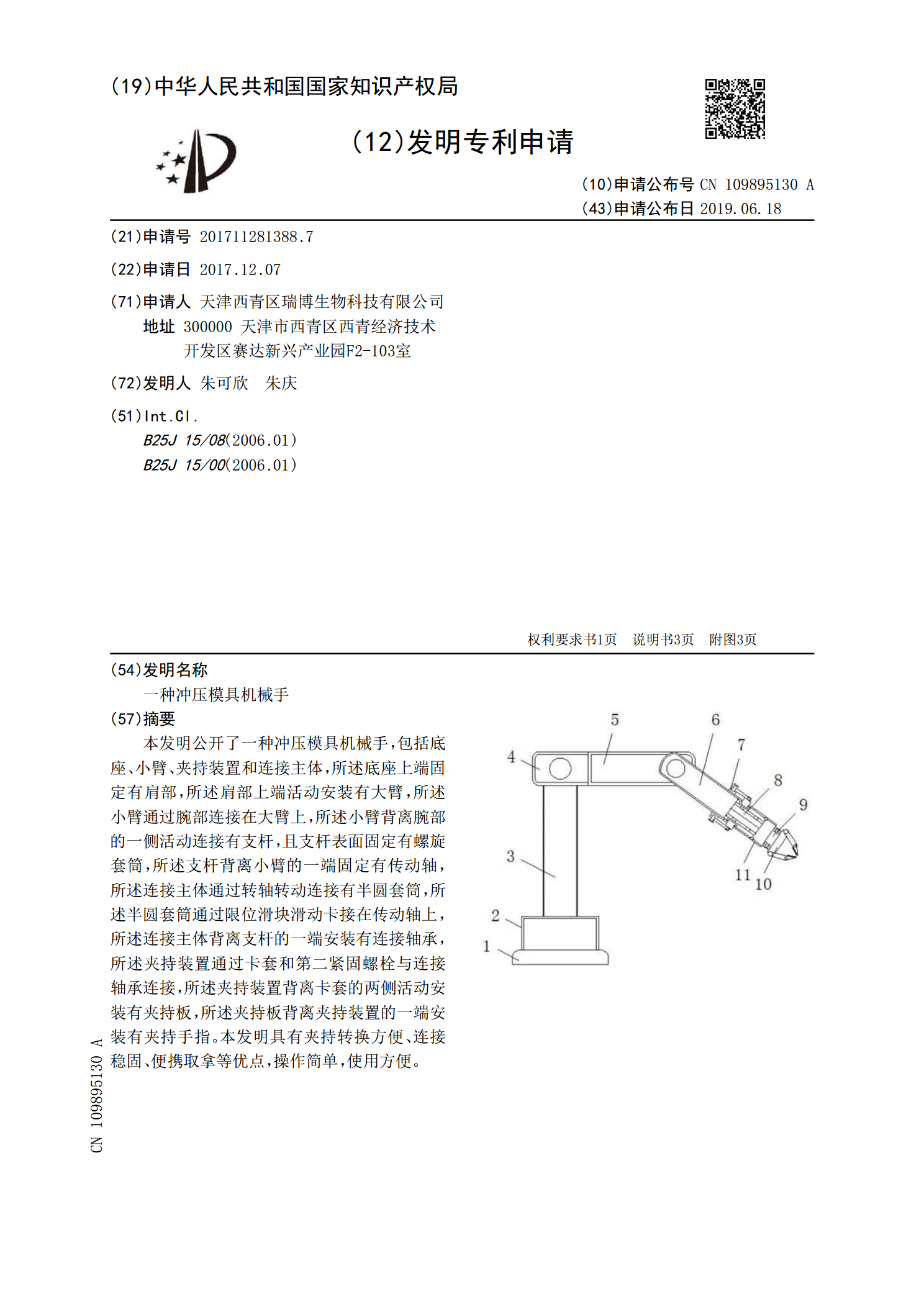
本发明公开了一种冲压模具机械手,包括底座、小臂、夹持装置和连接主体,所述底座上端固定有肩部,所述肩部上端活动安装有大臂,所述小臂通过腕部连接在大臂上,所述小臂背离腕部的一侧活动连接有支杆,且支杆表面固定有螺旋套筒,所述支杆背离小臂的一端固定有传动轴,所述连接主体通过转轴转动连接有半圆套筒,所述半圆套筒通过限位滑块滑动卡接在传动轴上,所述连接主体背离支杆的一端安装有连接轴承,所述夹持装置通过卡套和第二紧固螺栓与连接轴承连接,所述夹持装置背离卡套的两侧活动安装有夹持板,所述夹持板背离夹持装置的一端安装有夹持手

一种冲压模具机械手.pdf
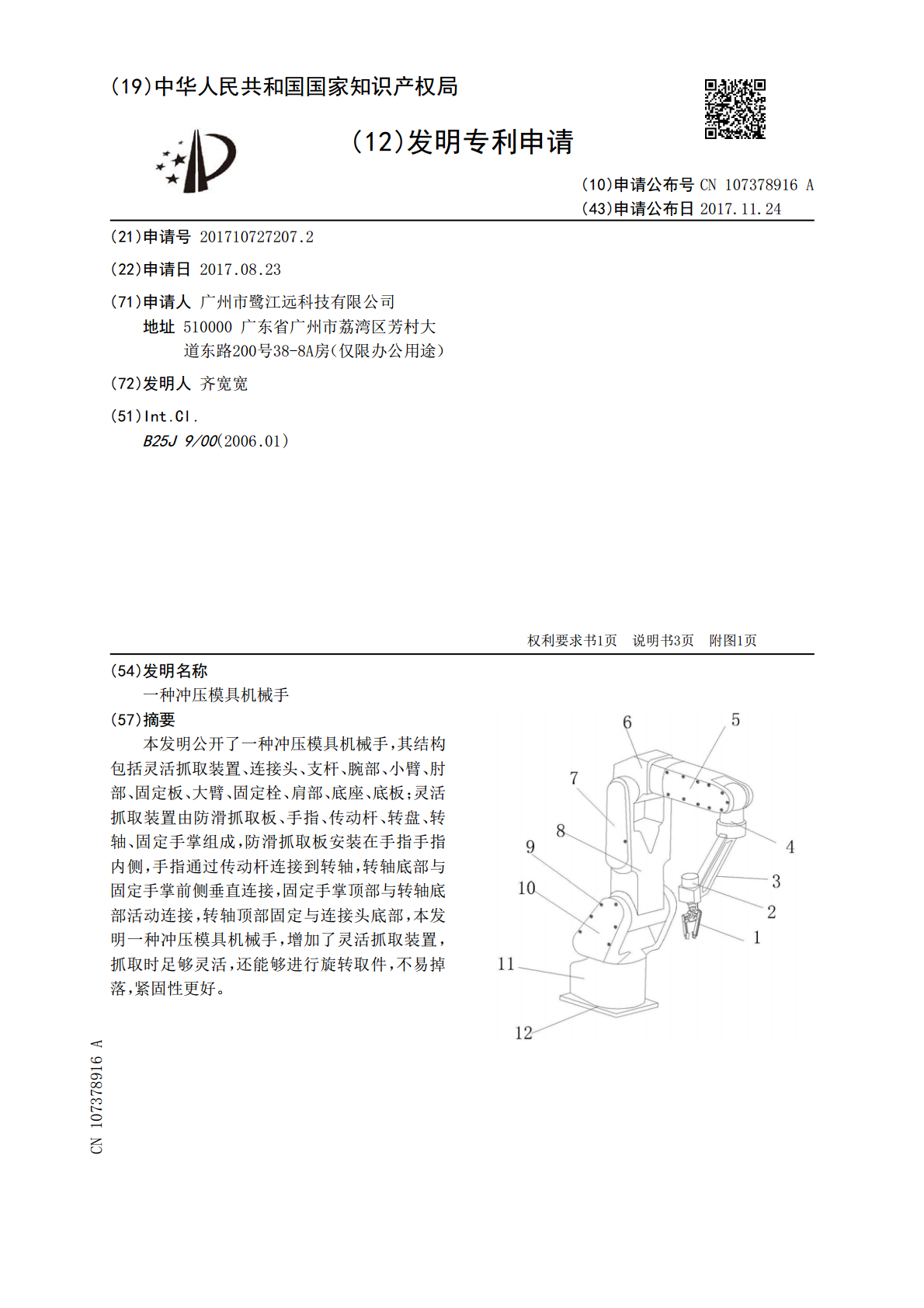
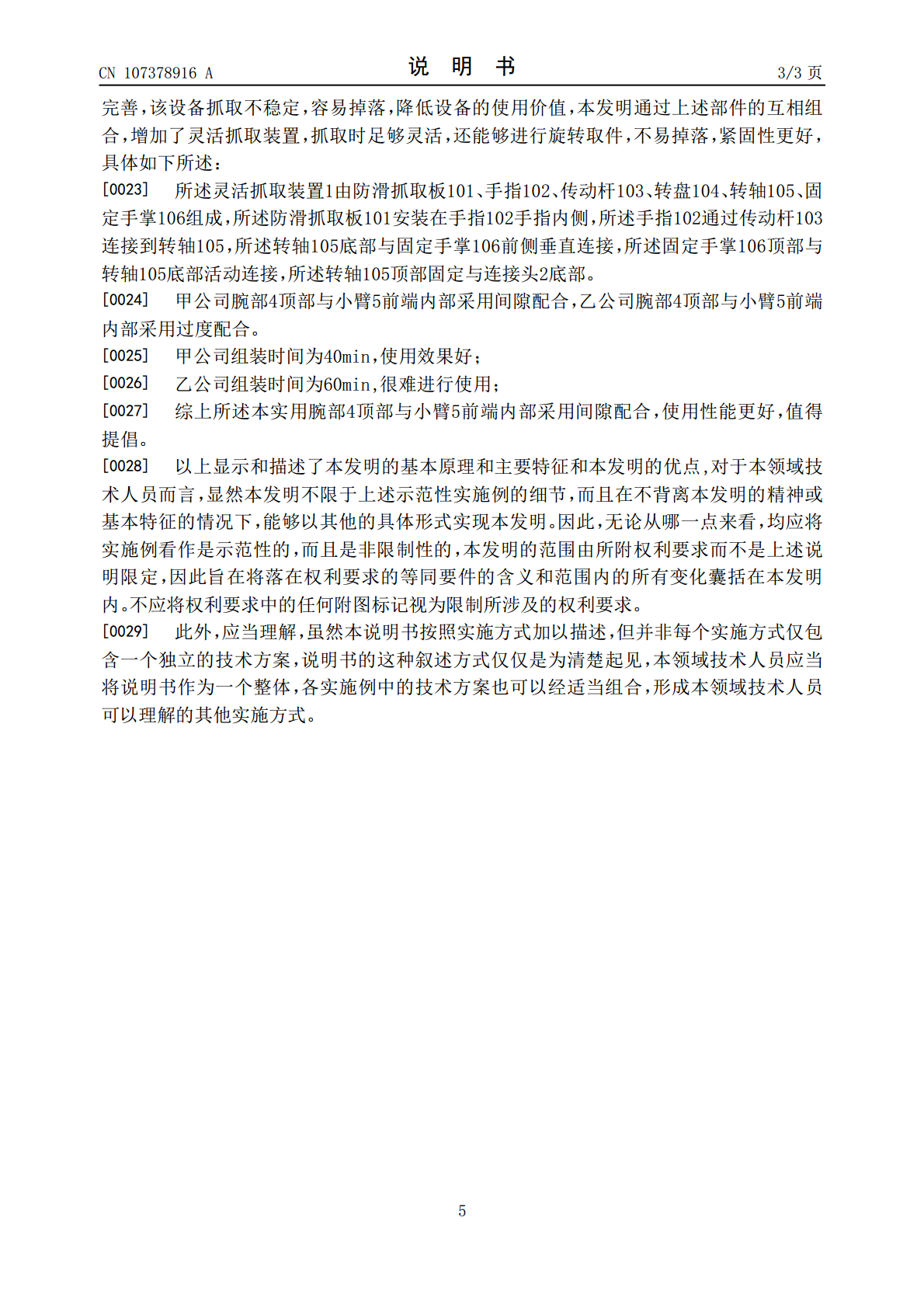
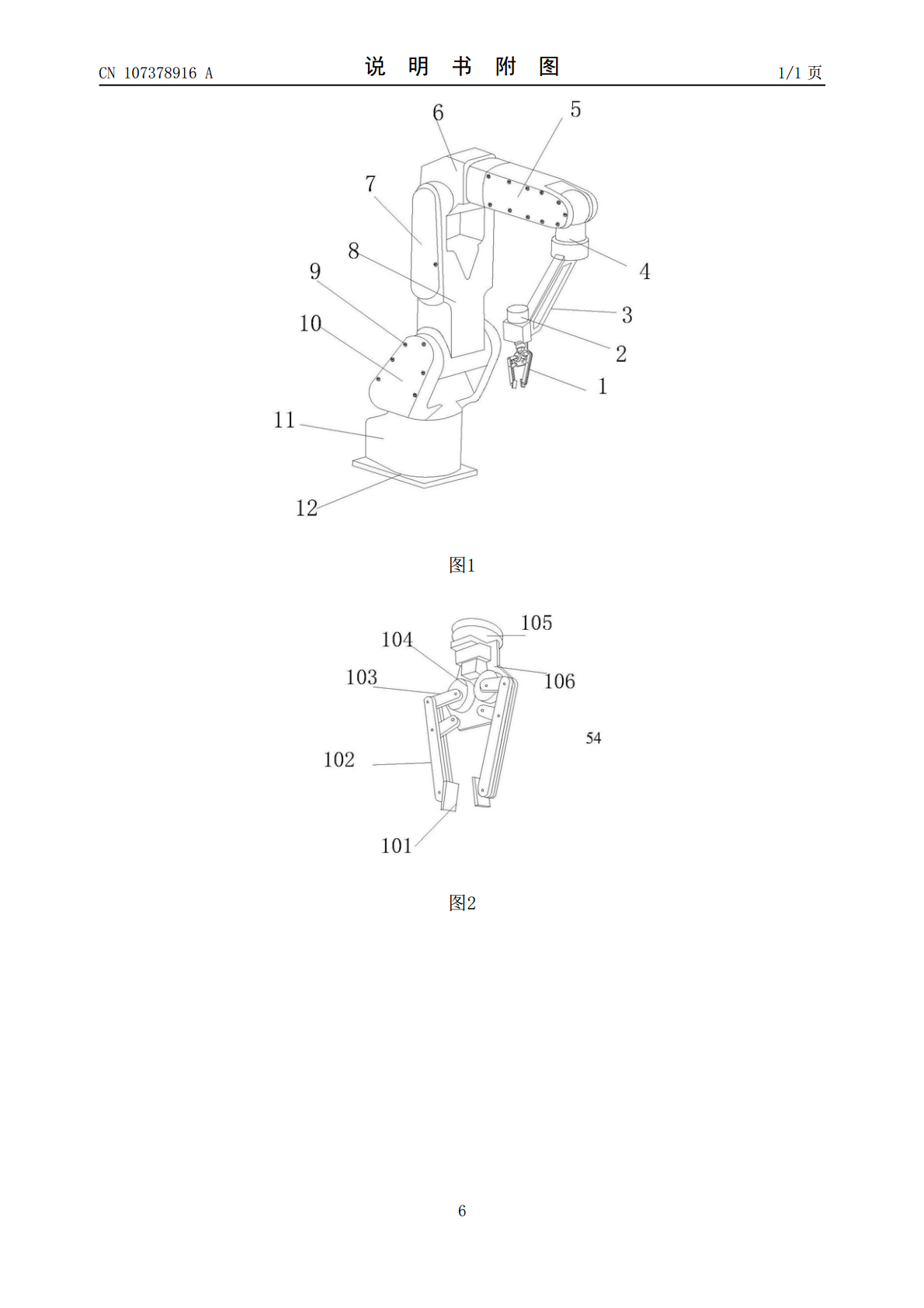
本发明公开了一种冲压模具机械手,其结构包括灵活抓取装置、连接头、支杆、腕部、小臂、肘部、固定板、大臂、固定栓、肩部、底座、底板;灵活抓取装置由防滑抓取板、手指、传动杆、转盘、转轴、固定手掌组成,防滑抓取板安装在手指手指内侧,手指通过传动杆连接到转轴,转轴底部与固定手掌前侧垂直连接,固定手掌顶部与转轴底部活动连接,转轴顶部固定与连接头底部,本发明一种冲压模具机械手,增加了灵活抓取装置,抓取时足够灵活,还能够进行旋转取件,不易掉落,紧固性更好。
一种冲压模具的冷却装置及冲压模具.pdf
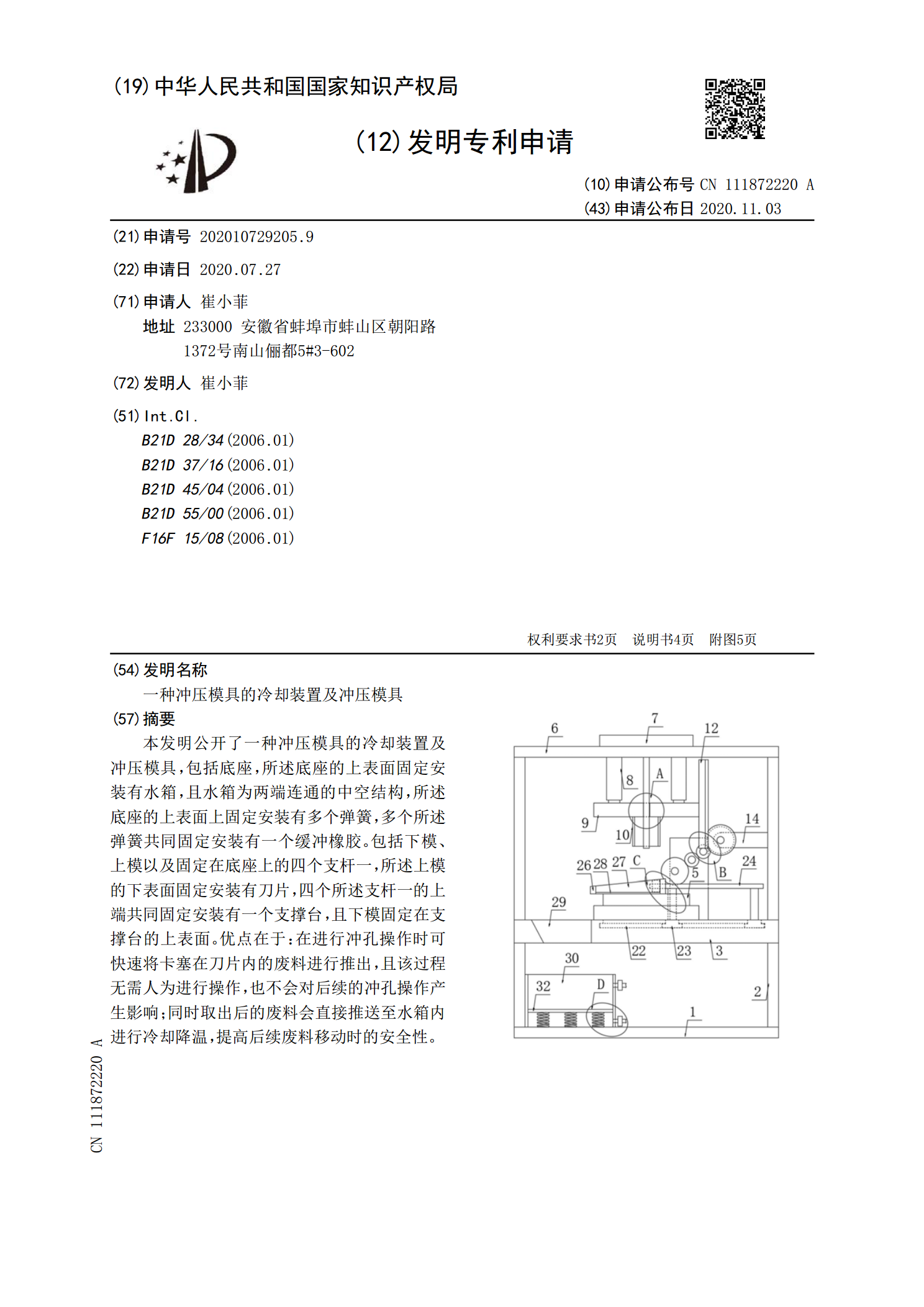
本发明公开了一种冲压模具的冷却装置及冲压模具,包括底座,所述底座的上表面固定安装有水箱,且水箱为两端连通的中空结构,所述底座的上表面上固定安装有多个弹簧,多个所述弹簧共同固定安装有一个缓冲橡胶。包括下模、上模以及固定在底座上的四个支杆一,所述上模的下表面固定安装有刀片,四个所述支杆一的上端共同固定安装有一个支撑台,且下模固定在支撑台的上表面。优点在于:在进行冲孔操作时可快速将卡塞在刀片内的废料进行推出,且该过程无需人为进行操作,也不会对后续的冲孔操作产生影响;同时取出后的废料会直接推送至水箱内进行冷却降温
一种冲压模具及冲压装置.pdf
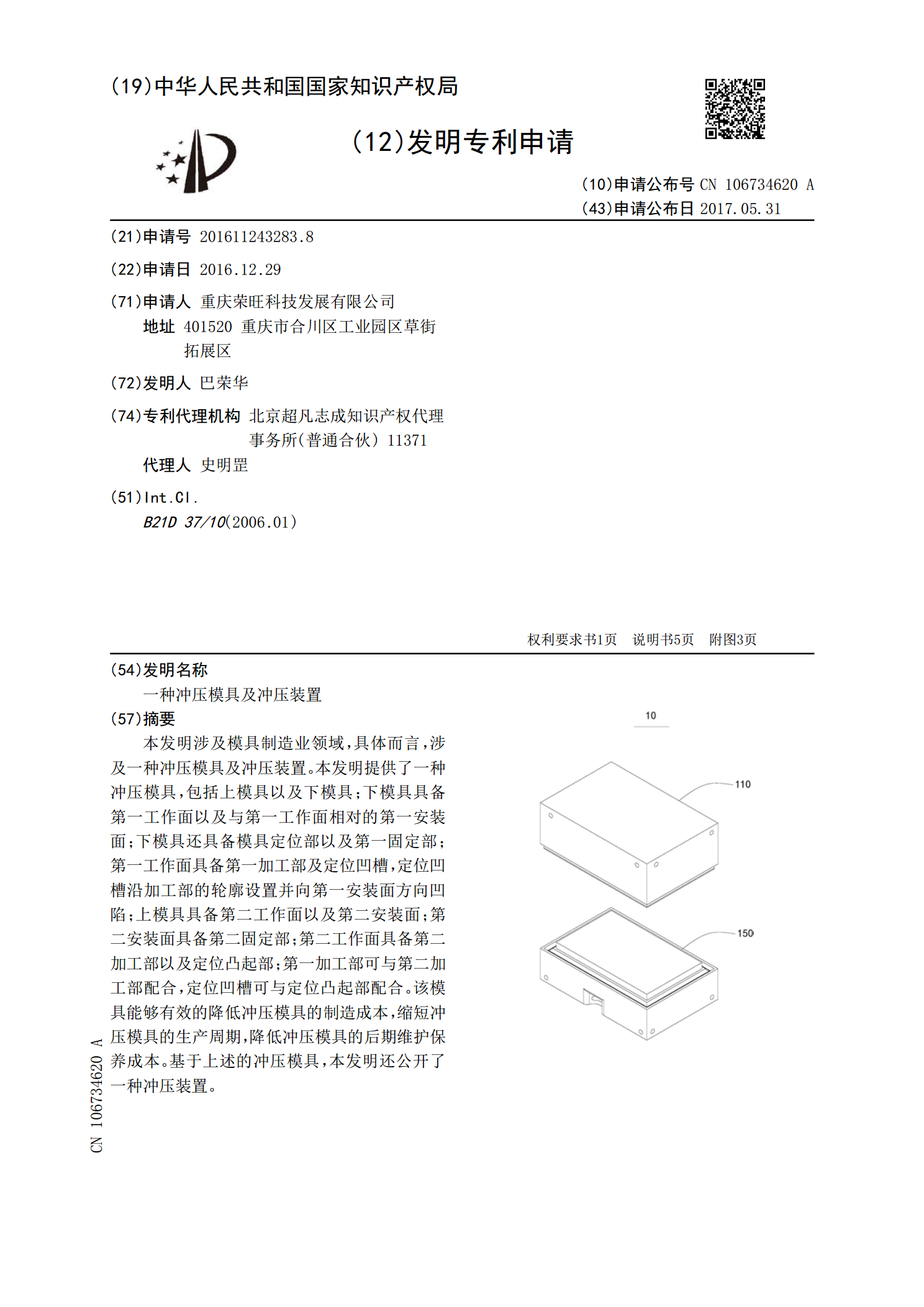
本发明涉及模具制造业领域,具体而言,涉及一种冲压模具及冲压装置。本发明提供了一种冲压模具,包括上模具以及下模具;下模具具备第一工作面以及与第一工作面相对的第一安装面;下模具还具备模具定位部以及第一固定部;第一工作面具备第一加工部及定位凹槽,定位凹槽沿加工部的轮廓设置并向第一安装面方向凹陷;上模具具备第二工作面以及第二安装面;第二安装面具备第二固定部;第二工作面具备第二加工部以及定位凸起部;第一加工部可与第二加工部配合,定位凹槽可与定位凸起部配合。该模具能够有效的降低冲压模具的制造成本,缩短冲压模具的生产周

一种冲压模具.pdf
本发明提供了一种冲压模具。一种冲压模具,包括模具底板,模具底板内安装有清扫设备,清扫设备内开设有清扫设备伸缩轴,清扫设备伸缩轴下开设有清理槽,清理槽上安装有收集装置,收集装置上安装有清扫机,清扫机内开设有清扫机头,清扫机头内开设有清扫机头外筒,清扫机头外筒内开设有清扫机内轴外筒,清扫机内轴外筒上安装有若干个毛刷。本发明通过嵌套在冲压模具内部的清扫设备对冲压台上残留的金属屑进行清扫,清扫过后的金属屑掉落在收集装置上,再由清理槽把金属屑排出模具外,而定位装置和定位外筒让模具冲压时精准定位冲压,有效的避免了残留