
一种小型水下航行器转向装置.pdf

鸿朗****ka

1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种小型水下航行器转向装置.pdf
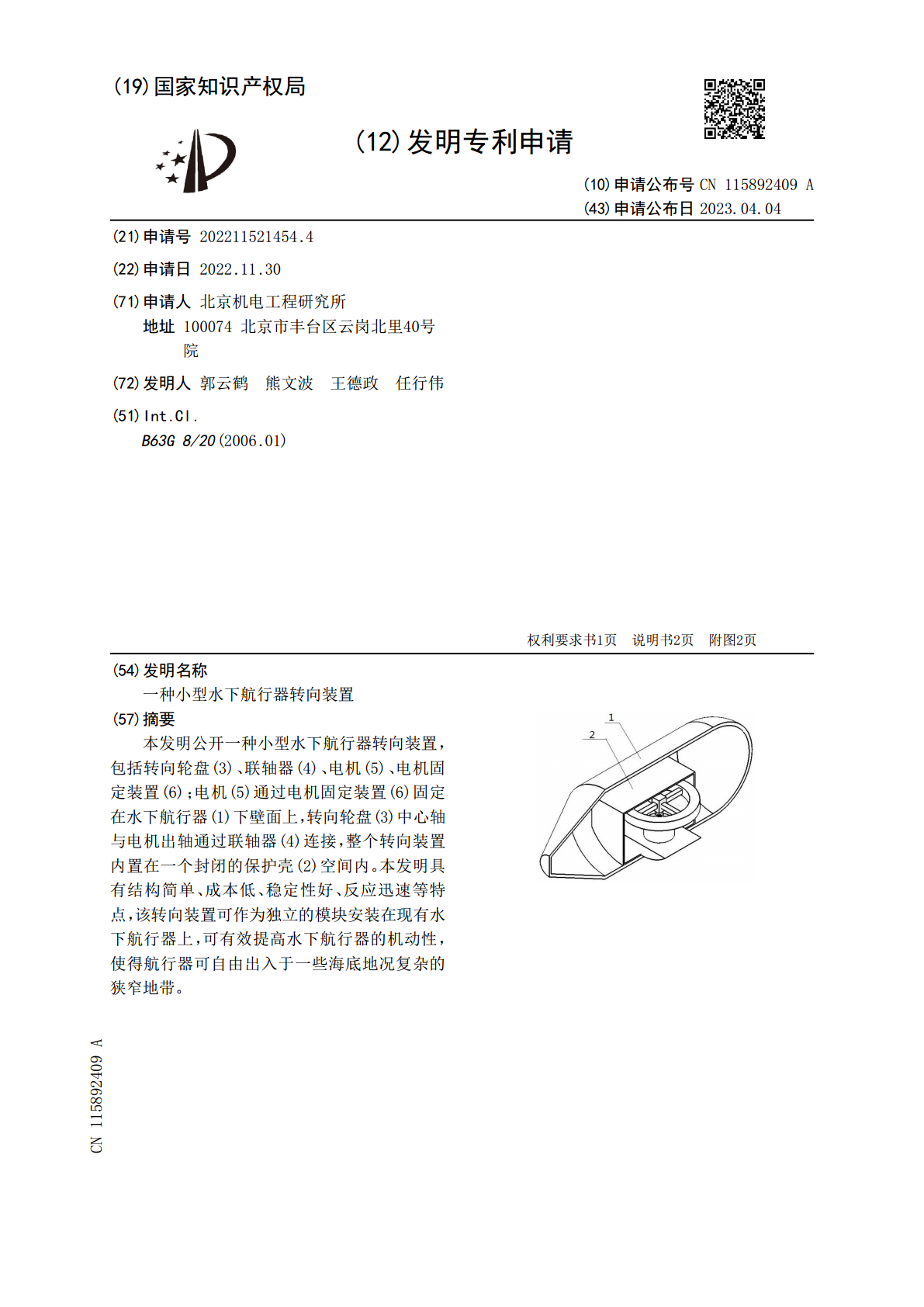
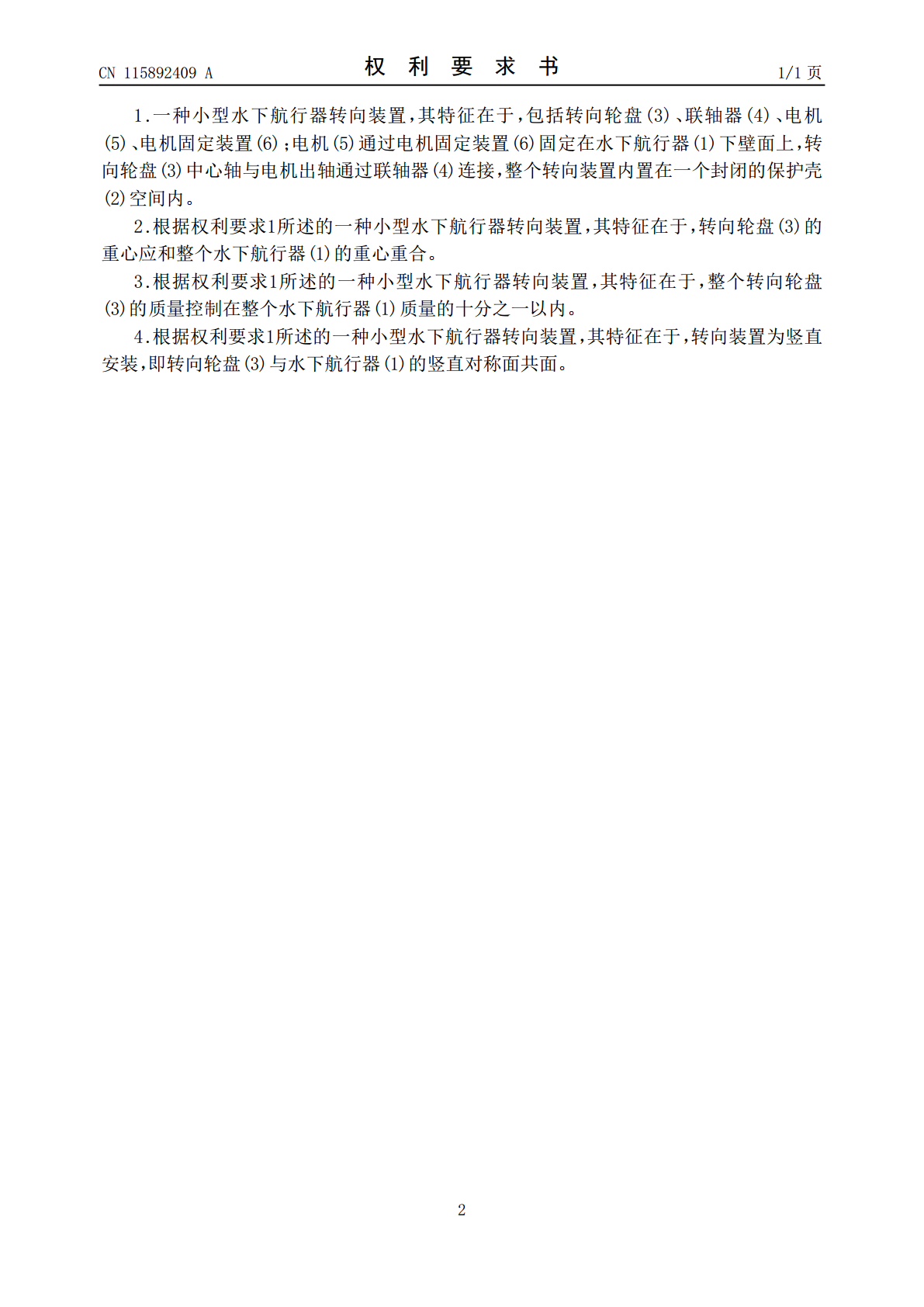
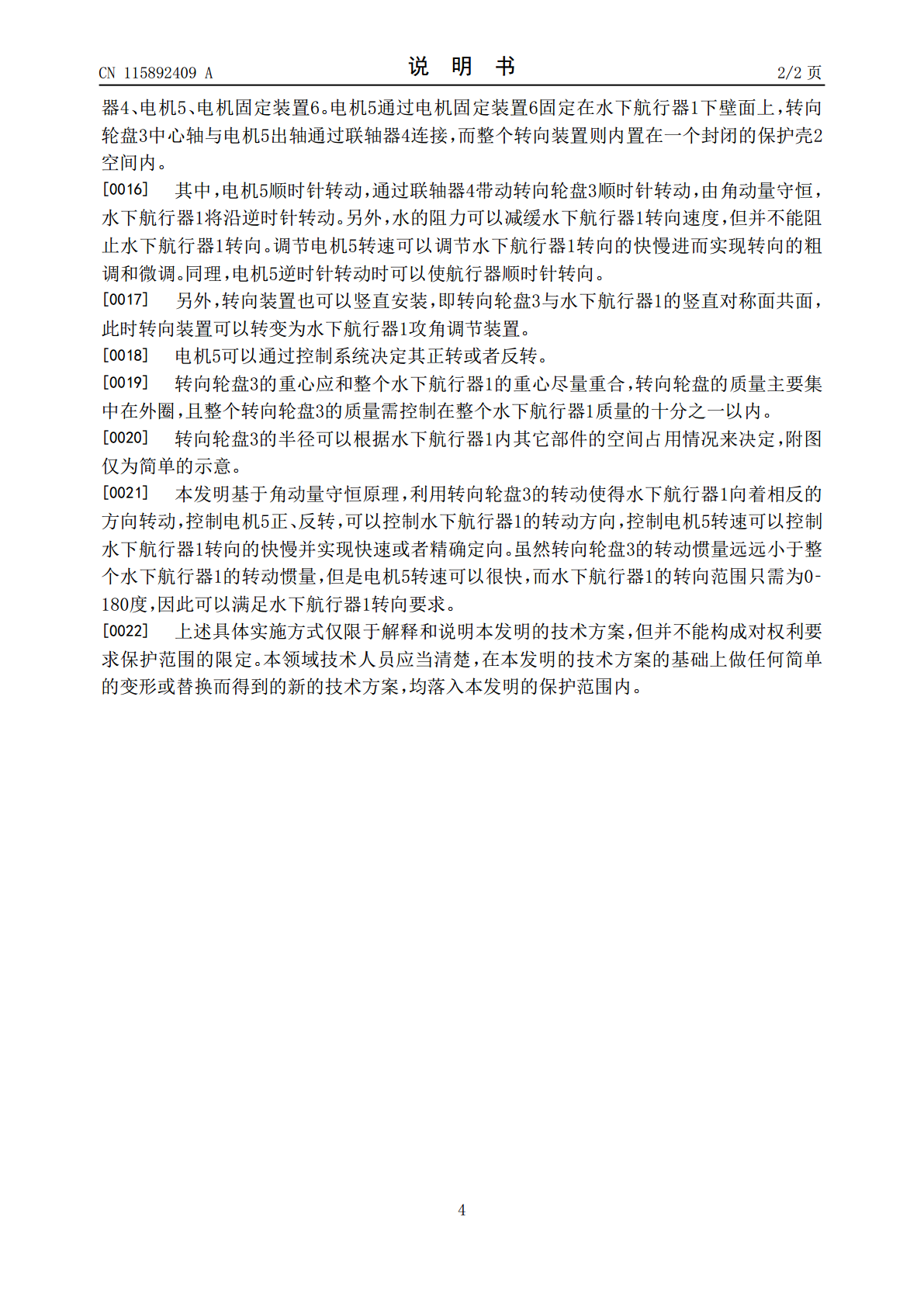
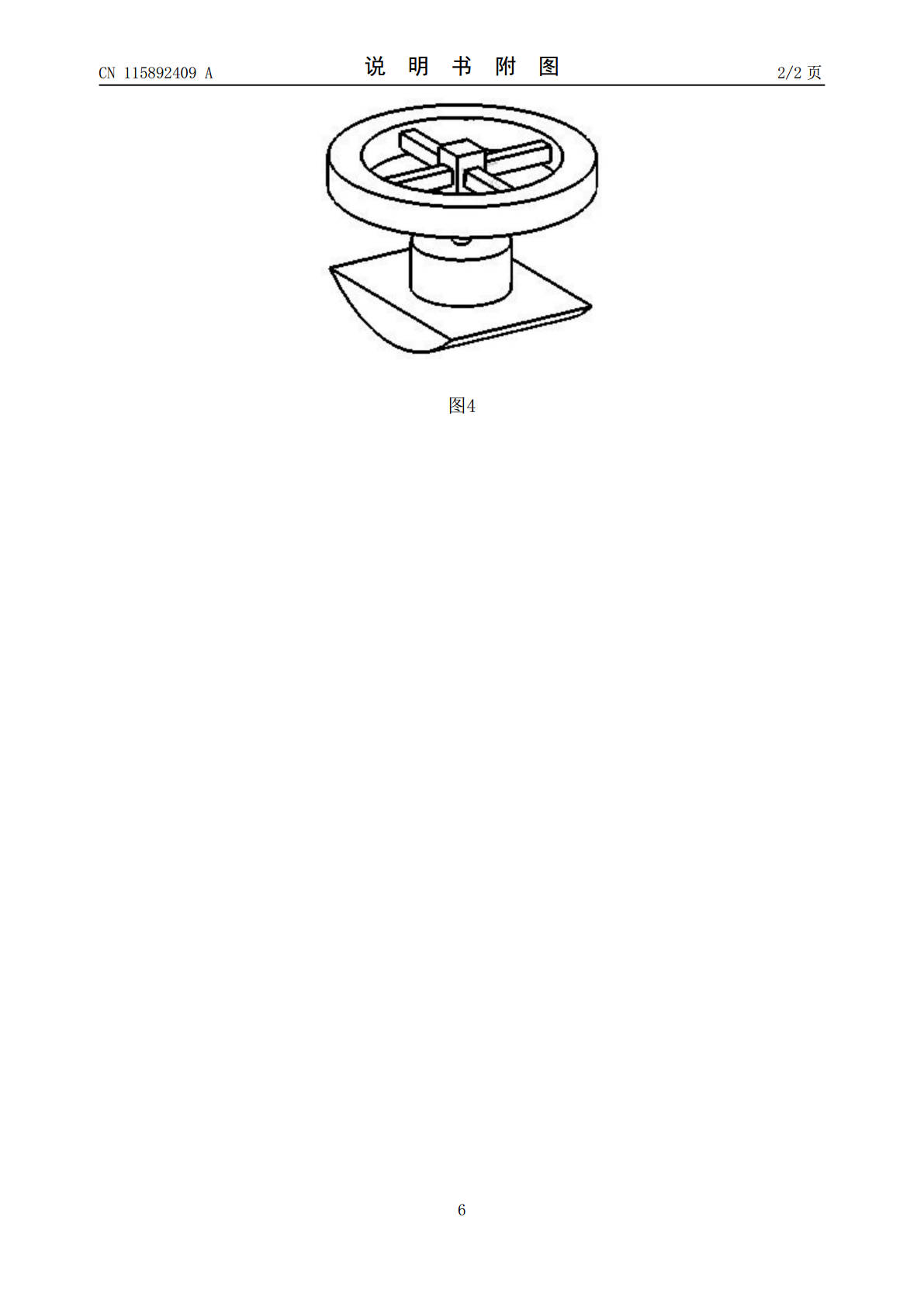
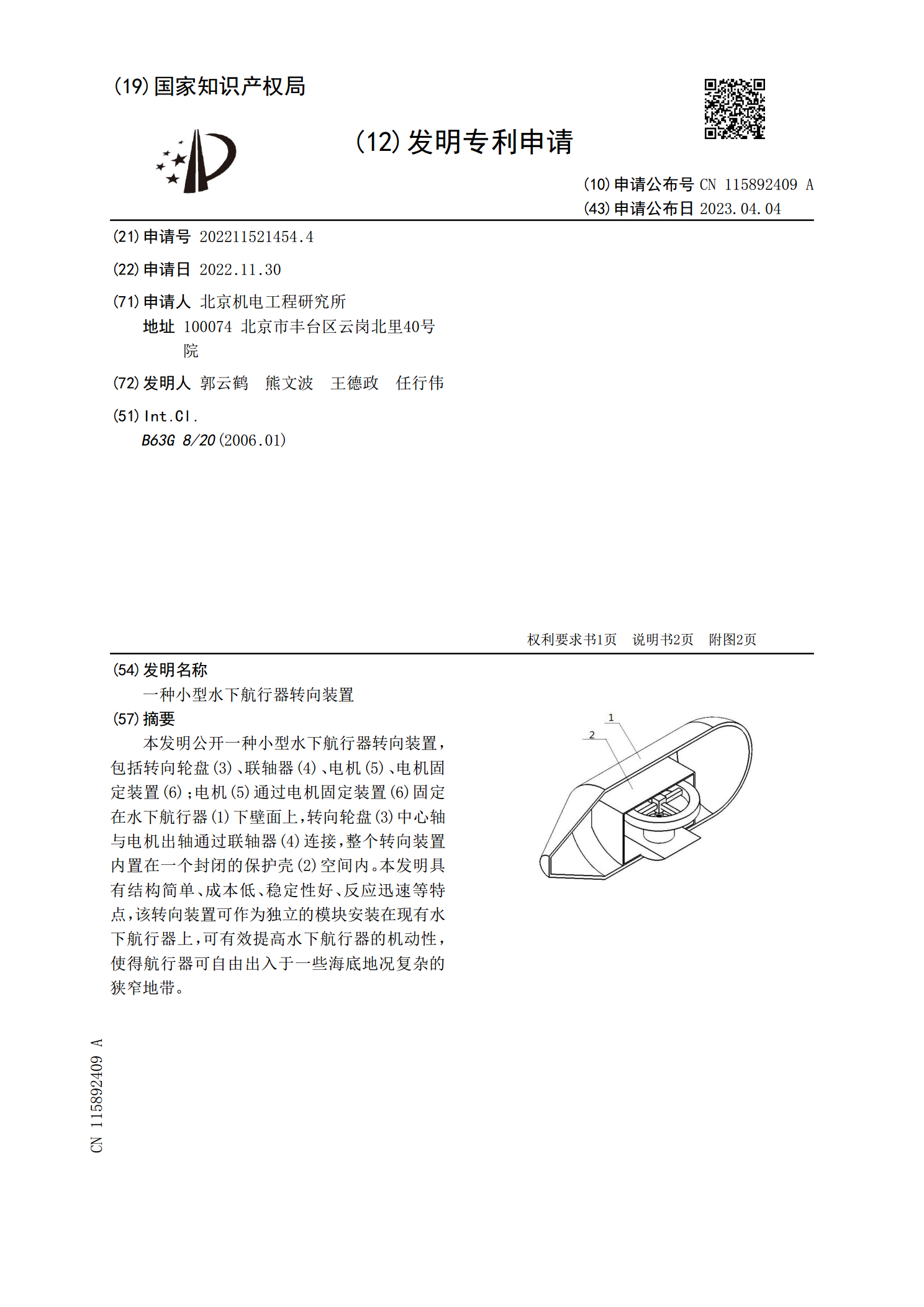
本发明公开一种小型水下航行器转向装置,包括转向轮盘(3)、联轴器(4)、电机(5)、电机固定装置(6);电机(5)通过电机固定装置(6)固定在水下航行器(1)下壁面上,转向轮盘(3)中心轴与电机出轴通过联轴器(4)连接,整个转向装置内置在一个封闭的保护壳(2)空间内。本发明具有结构简单、成本低、稳定性好、反应迅速等特点,该转向装置可作为独立的模块安装在现有水下航行器上,可有效提高水下航行器的机动性,使得航行器可自由出入于一些海底地况复杂的狭窄地带。
中小型水下航行器的横滚调节装置.pdf
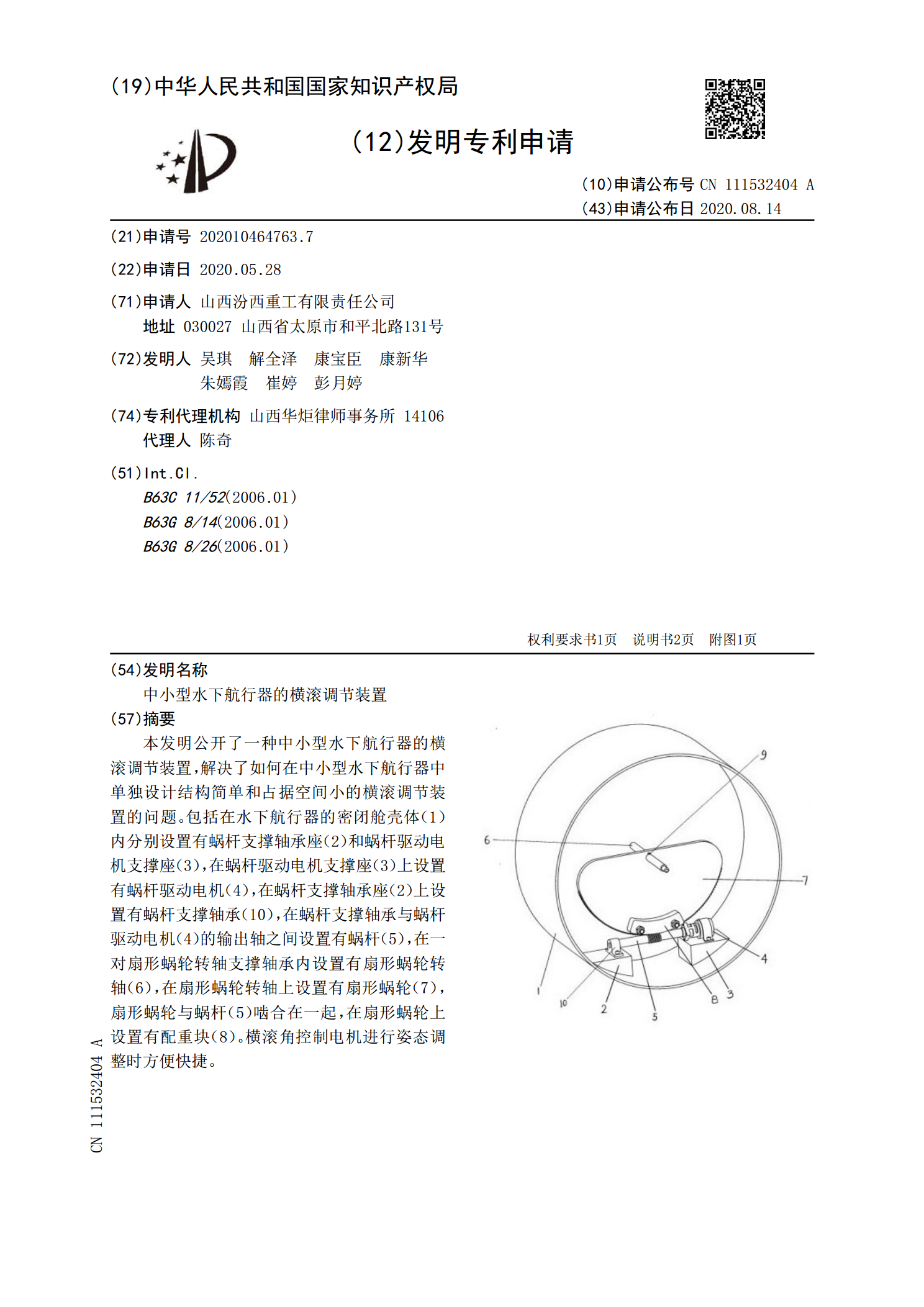
本发明公开了一种中小型水下航行器的横滚调节装置,解决了如何在中小型水下航行器中单独设计结构简单和占据空间小的横滚调节装置的问题。包括在水下航行器的密闭舱壳体(1)内分别设置有蜗杆支撑轴承座(2)和蜗杆驱动电机支撑座(3),在蜗杆驱动电机支撑座(3)上设置有蜗杆驱动电机(4),在蜗杆支撑轴承座(2)上设置有蜗杆支撑轴承(10),在蜗杆支撑轴承与蜗杆驱动电机(4)的输出轴之间设置有蜗杆(5),在一对扇形蜗轮转轴支撑轴承内设置有扇形蜗轮转轴(6),在扇形蜗轮转轴上设置有扇形蜗轮(7),扇形蜗轮与蜗杆(5)啮合在
长航程自主水下航行器低功耗转向装置.pdf
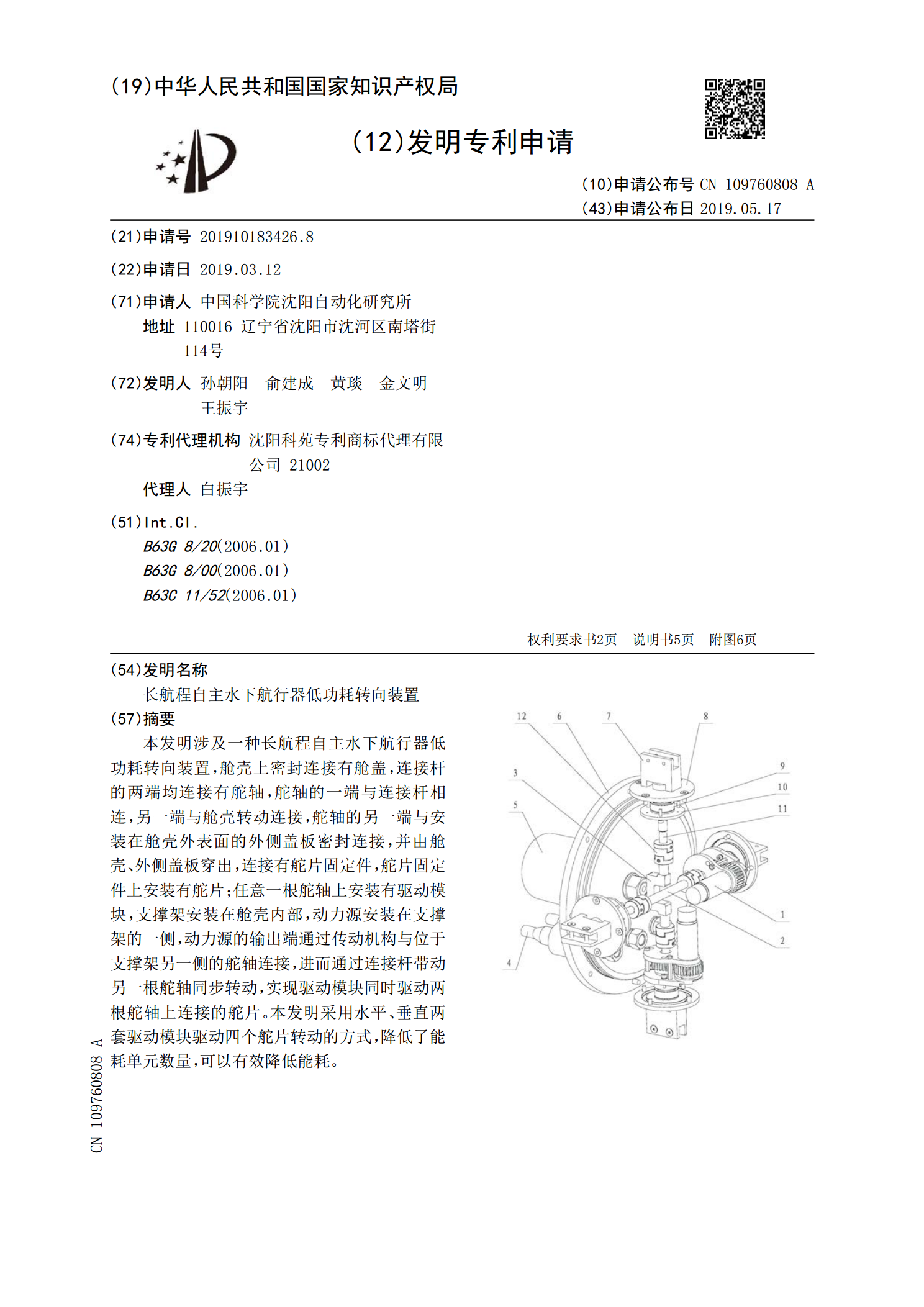
本发明涉及一种长航程自主水下航行器低功耗转向装置,舱壳上密封连接有舱盖,连接杆的两端均连接有舵轴,舵轴的一端与连接杆相连,另一端与舱壳转动连接,舵轴的另一端与安装在舱壳外表面的外侧盖板密封连接,并由舱壳、外侧盖板穿出,连接有舵片固定件,舵片固定件上安装有舵片;任意一根舵轴上安装有驱动模块,支撑架安装在舱壳内部,动力源安装在支撑架的一侧,动力源的输出端通过传动机构与位于支撑架另一侧的舵轴连接,进而通过连接杆带动另一根舵轴同步转动,实现驱动模块同时驱动两根舵轴上连接的舵片。本发明采用水平、垂直两套驱动模块驱动
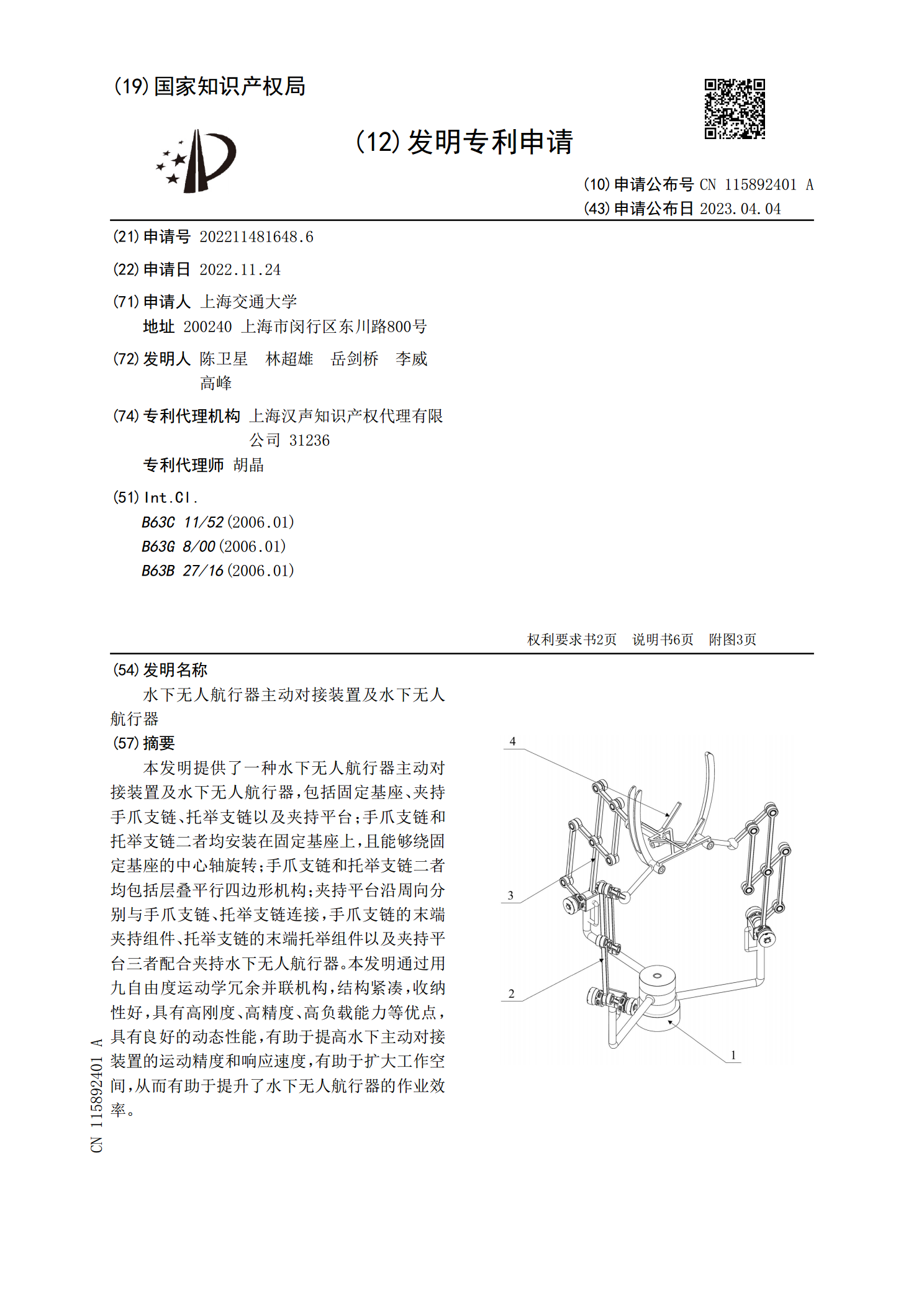
水下无人航行器主动对接装置及水下无人航行器.pdf
本发明提供了一种水下无人航行器主动对接装置及水下无人航行器,包括固定基座、夹持手爪支链、托举支链以及夹持平台;手爪支链和托举支链二者均安装在固定基座上,且能够绕固定基座的中心轴旋转;手爪支链和托举支链二者均包括层叠平行四边形机构;夹持平台沿周向分别与手爪支链、托举支链连接,手爪支链的末端夹持组件、托举支链的末端托举组件以及夹持平台三者配合夹持水下无人航行器。本发明通过用九自由度运动学冗余并联机构,结构紧凑,收纳性好,具有高刚度、高精度、高负载能力等优点,具有良好的动态性能,有助于提高水下主动对接装置的运动
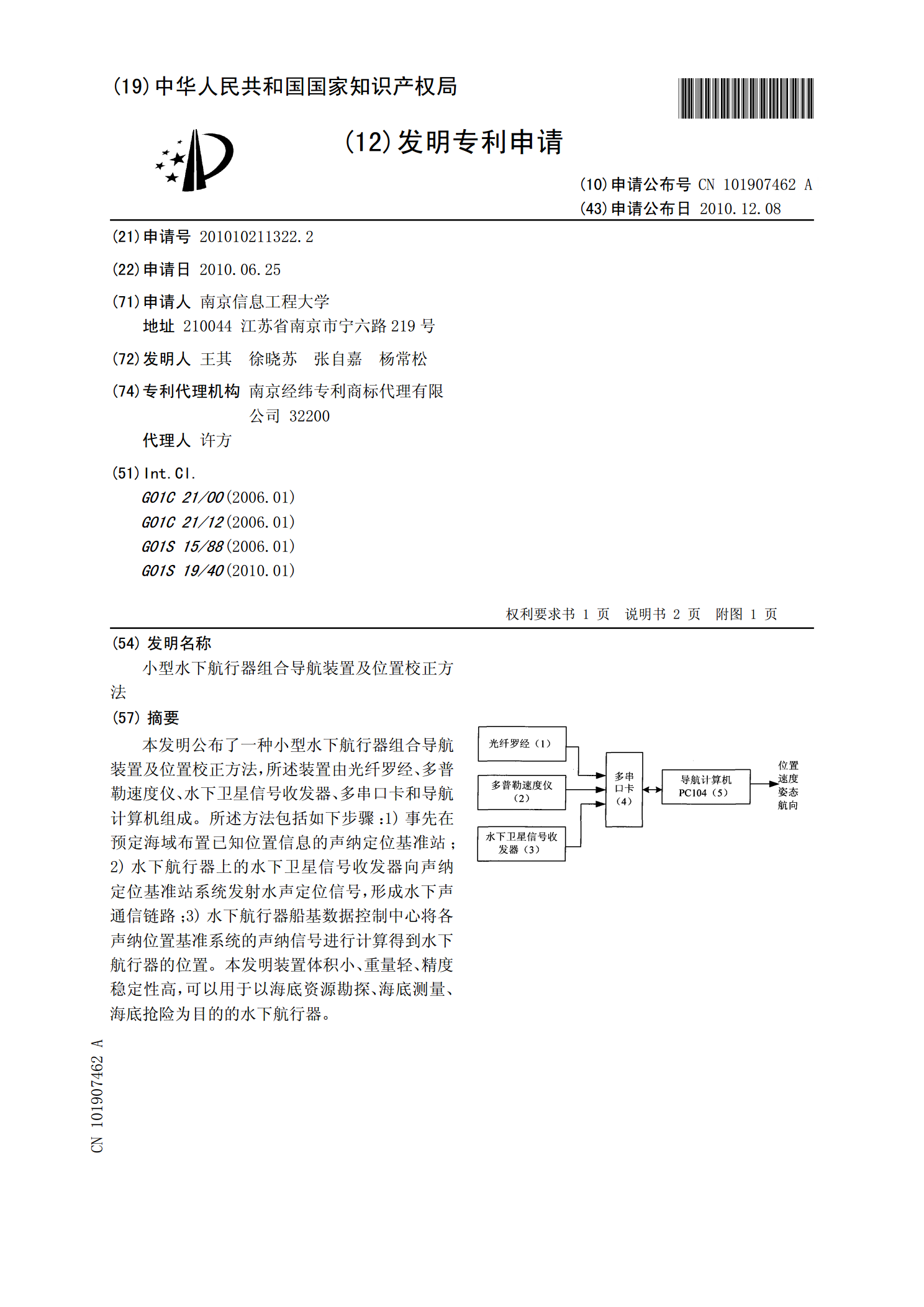
小型水下航行器组合导航装置及位置校正方法.pdf
本发明公布了一种小型水下航行器组合导航装置及位置校正方法,所述装置由光纤罗经、多普勒速度仪、水下卫星信号收发器、多串口卡和导航计算机组成。所述方法包括如下步骤:1)事先在预定海域布置已知位置信息的声纳定位基准站;2)水下航行器上的水下卫星信号收发器向声纳定位基准站系统发射水声定位信号,形成水下声通信链路;3)水下航行器船基数据控制中心将各声纳位置基准系统的声纳信号进行计算得到水下航行器的位置。本发明装置体积小、重量轻、精度稳定性高,可以用于以海底资源勘探、海底测量、海底抢险为目的的水下航行器。