
微型仿生空间扑翼机构.pdf

靖烟****魔王


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

微型仿生空间扑翼机构.pdf
本发明公开了一种实现扑翼翼尖做8字型空间运动,翼面做拍打运动、摆动运动和扭转运动的复合运动方法。所述微型仿生空间扑翼机构主要由微型直流电机、减速齿轮、偏转主轴、摆杆、柔性接头、扑翼、扑翼安装支架和箱体构成。微型直流电机通过减速齿轮驱动偏转主轴做回转运动,偏转主轴带动摆杆做空间运动,扑翼安装在扑翼安装支架上,扑翼安装支架通过柔性接头安装在箱体上,另一端通过销轴与摆杆相连,当摆杆做空间运动时带动扑翼翼尖做空间8字型运动。本发明具有结构简单,扑翼运动形式接近鸟类扑翼运动形式的特点。
应用于可悬停式微型扑翼飞行器的仿生扑动机构.pdf
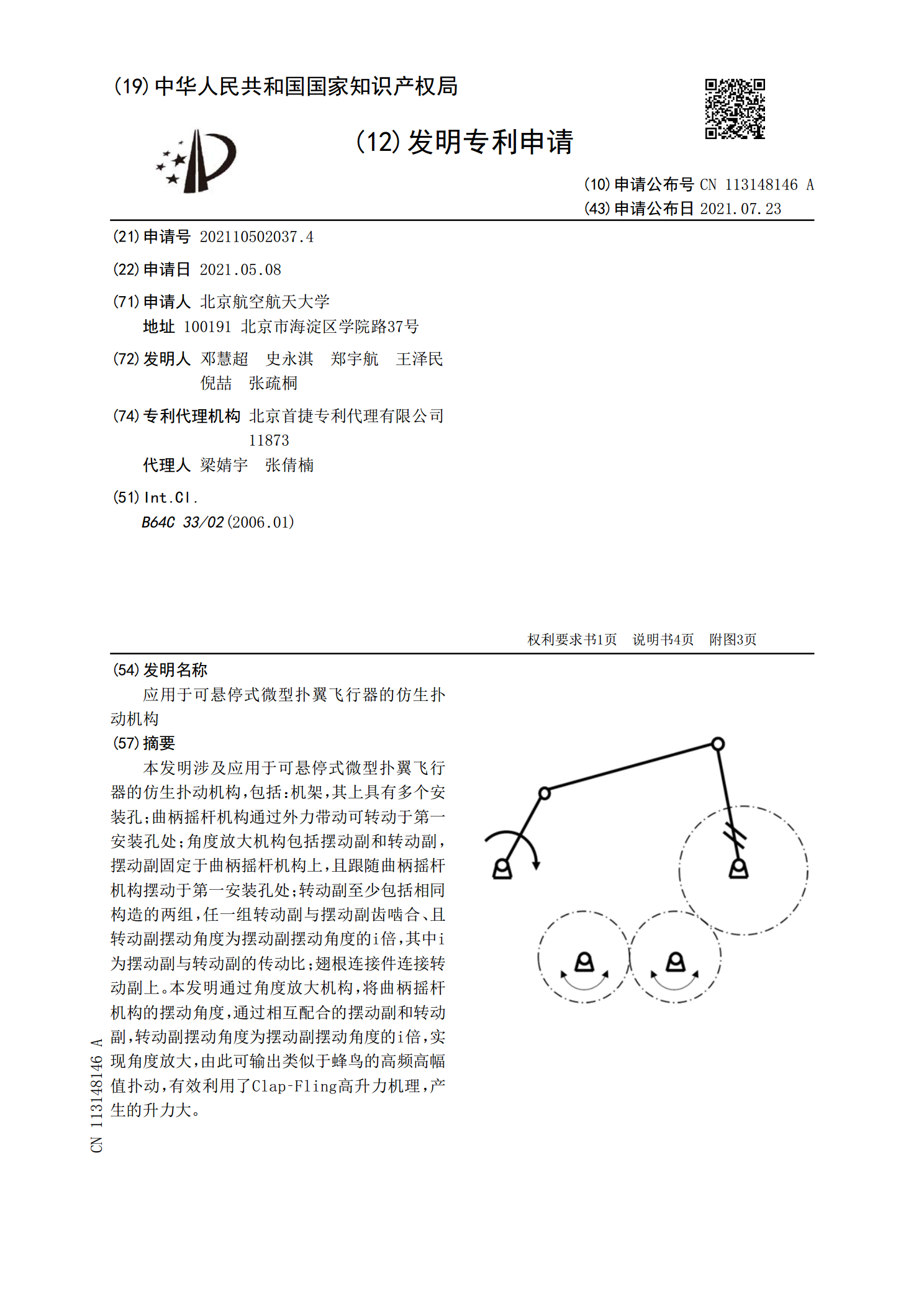
本发明涉及应用于可悬停式微型扑翼飞行器的仿生扑动机构,包括:机架,其上具有多个安装孔;曲柄摇杆机构通过外力带动可转动于第一安装孔处;角度放大机构包括摆动副和转动副,摆动副固定于曲柄摇杆机构上,且跟随曲柄摇杆机构摆动于第一安装孔处;转动副至少包括相同构造的两组,任一组转动副与摆动副齿啮合、且转动副摆动角度为摆动副摆动角度的i倍,其中i为摆动副与转动副的传动比;翅根连接件连接转动副上。本发明通过角度放大机构,将曲柄摇杆机构的摆动角度,通过相互配合的摆动副和转动副,转动副摆动角度为摆动副摆动角度的i倍,实现角度

微型仿生扑翼飞行器研究综述.docx
微型仿生扑翼飞行器研究综述微型仿生扑翼飞行器研究综述摘要:微型仿生扑翼飞行器是一种模仿昆虫翅膀运动原理设计的飞行器,具有较高的机动性和适应性。本文对微型仿生扑翼飞行器的研究进行了综述,包括其原理、设计与控制、应用等方面的内容。通过对相关研究的梳理和分析,总结了目前研究中的主要问题和挑战,并展望了未来的发展方向。1.介绍微型仿生扑翼飞行器是一种以昆虫翅膀运动原理为基础设计的飞行器,模仿昆虫的翅膀运动方式,具有较高的机动性和适应性。它具有广泛的应用前景,可以应用于无人机技术、灵巧操控、救援救护等领域。2.原理
基于曲柄摇杆与被动旋转机构的微型仿生扑翼飞行器.pdf
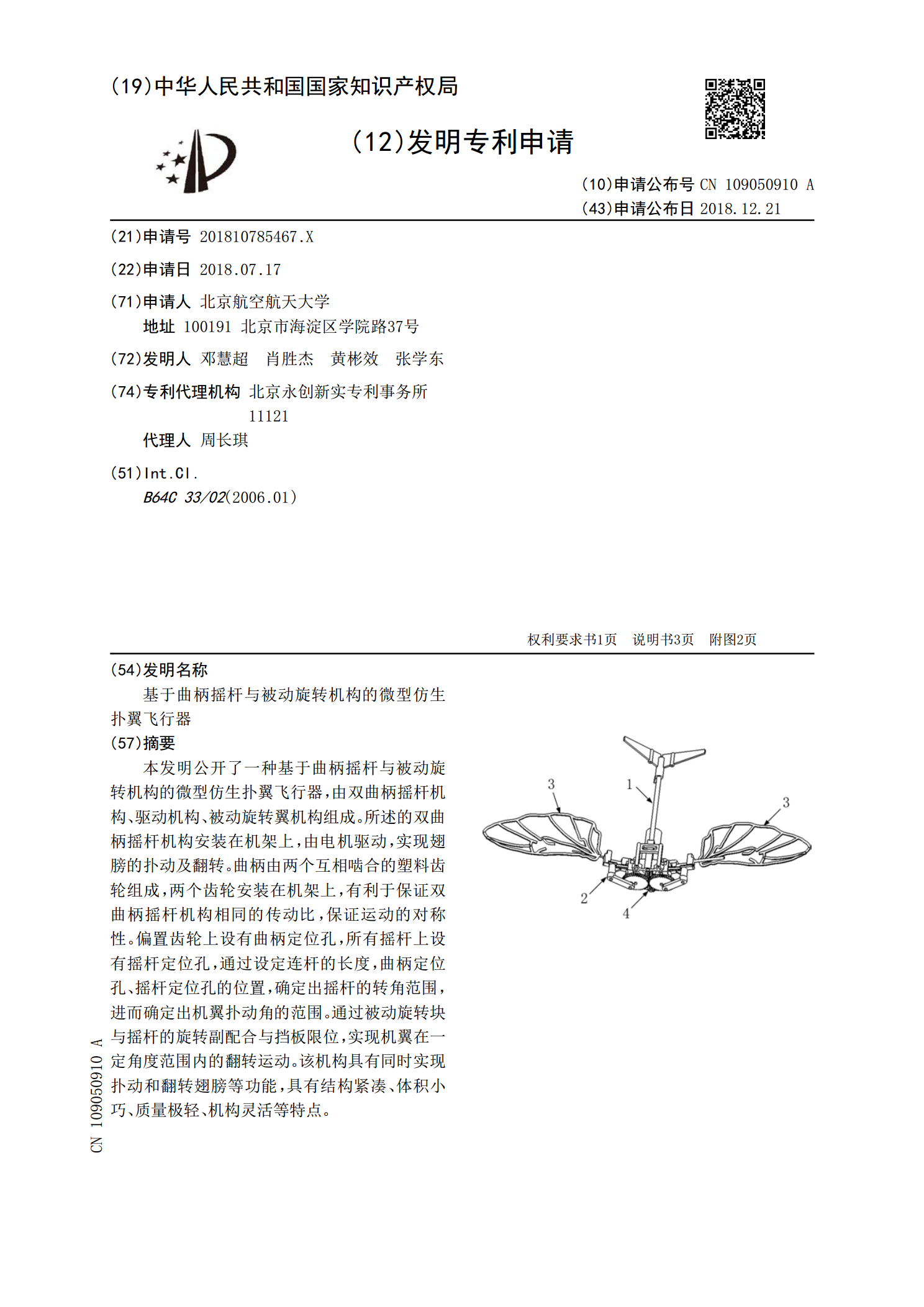
本发明公开了一种基于曲柄摇杆与被动旋转机构的微型仿生扑翼飞行器,由双曲柄摇杆机构、驱动机构、被动旋转翼机构组成。所述的双曲柄摇杆机构安装在机架上,由电机驱动,实现翅膀的扑动及翻转。曲柄由两个互相啮合的塑料齿轮组成,两个齿轮安装在机架上,有利于保证双曲柄摇杆机构相同的传动比,保证运动的对称性。偏置齿轮上设有曲柄定位孔,所有摇杆上设有摇杆定位孔,通过设定连杆的长度,曲柄定位孔、摇杆定位孔的位置,确定出摇杆的转角范围,进而确定出机翼扑动角的范围。通过被动旋转块与摇杆的旋转副配合与挡板限位,实现机翼在一定角度范围

一种双翼式微型仿生扑翼机.pdf
一种双翼式微型仿生扑翼机,包括驱动机构、双扑翼机构、尾翼机构及主臂,驱动机构连接在主臂的正前端,双扑翼机构位于主臂的正上方,尾翼机构连接在主臂的正后端。驱动机构包括菱形支架、微型直流电机、齿轮减速机构和两个曲柄连杆机构,双扑翼机构包括两个对称扑翼架、四根扑翼安装杆和上下两层扑翼,尾翼机构包含电磁舵、尾翼和摆翼。微型直流电机通过齿轮减速机构和曲柄连杆机构拉动两个扑翼架上下运动,实现仿生扑翼。尾翼机构中的电磁舵通过改变电流方向来控制摆翼左右摆动,从而控制扑翼机的飞行方向。