
一种医疗用脚踏式双臂协调性锻炼恢复装置.pdf

念珊****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种医疗用脚踏式双臂协调性锻炼恢复装置.pdf
本发明涉及一种锻炼装置,尤其涉及一种医疗用脚踏式双臂协调性锻炼恢复装置。本发明的技术问题是:提供一种锻炼花样多、锻炼趣味性高的医疗用脚踏式双臂协调性锻炼恢复装置。技术方案如下:一种医疗用脚踏式双臂协调性锻炼恢复装置,包括有底座、第一机架、万向座、万向球、转盘、把手、第一支杆、螺母、靠板、滑轨、滑块、坐垫、第一轴承等;底座顶部左侧设有第一机架,第一机架顶部设有万向座,万向座内配合有万向球,万向球上设有转盘,转盘上设有两个把手。本发明使得使用者在进行手臂锻炼的同时,可将双脚放在脚踏板上,并转动转盘,由此通过踩
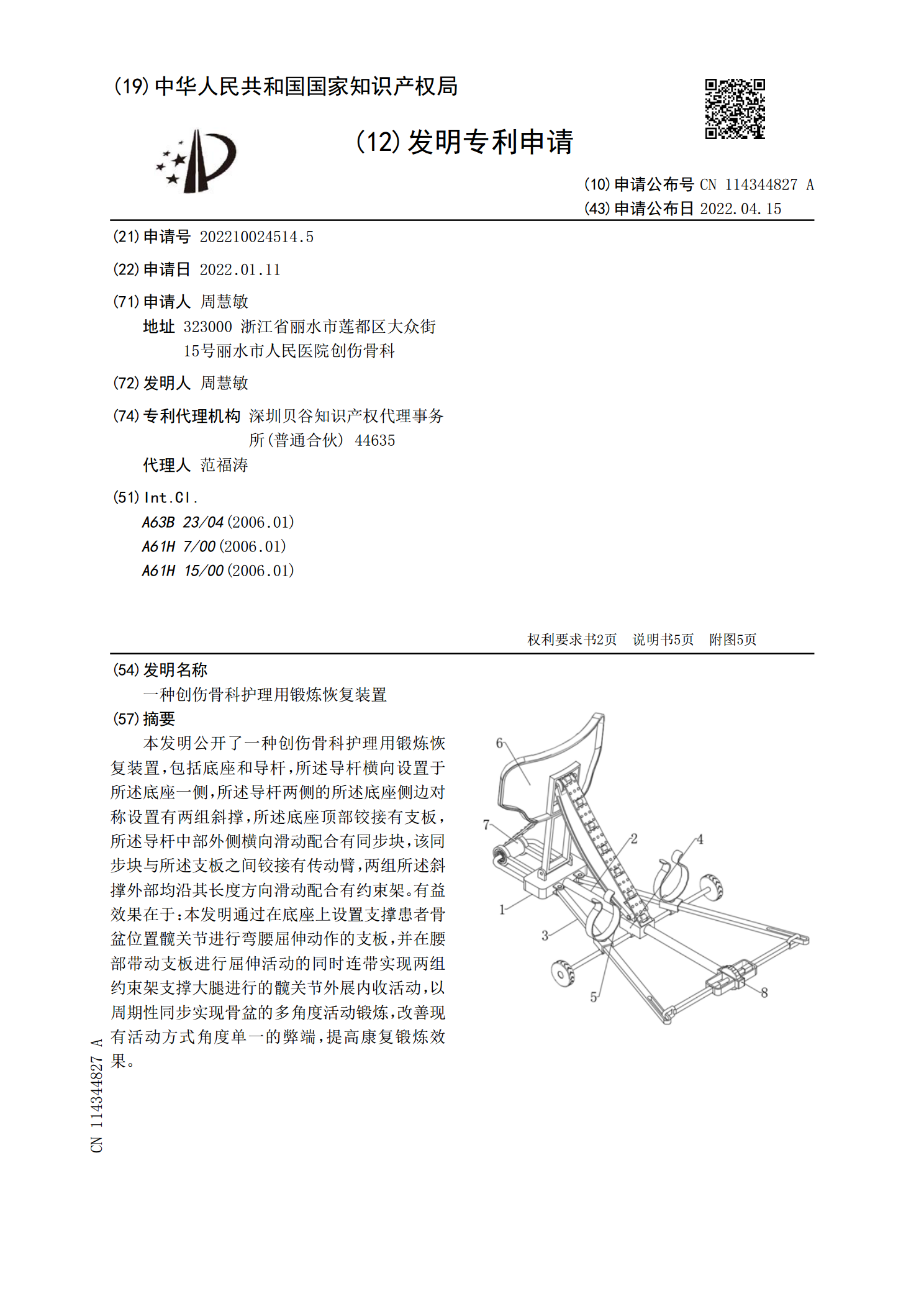
一种创伤骨科护理用锻炼恢复装置.pdf
本发明公开了一种创伤骨科护理用锻炼恢复装置,包括底座和导杆,所述导杆横向设置于所述底座一侧,所述导杆两侧的所述底座侧边对称设置有两组斜撑,所述底座顶部铰接有支板,所述导杆中部外侧横向滑动配合有同步块,该同步块与所述支板之间铰接有传动臂,两组所述斜撑外部均沿其长度方向滑动配合有约束架。有益效果在于:本发明通过在底座上设置支撑患者骨盆位置髋关节进行弯腰屈伸动作的支板,并在腰部带动支板进行屈伸活动的同时连带实现两组约束架支撑大腿进行的髋关节外展内收活动,以周期性同步实现骨盆的多角度活动锻炼,改善现有活动方式角度
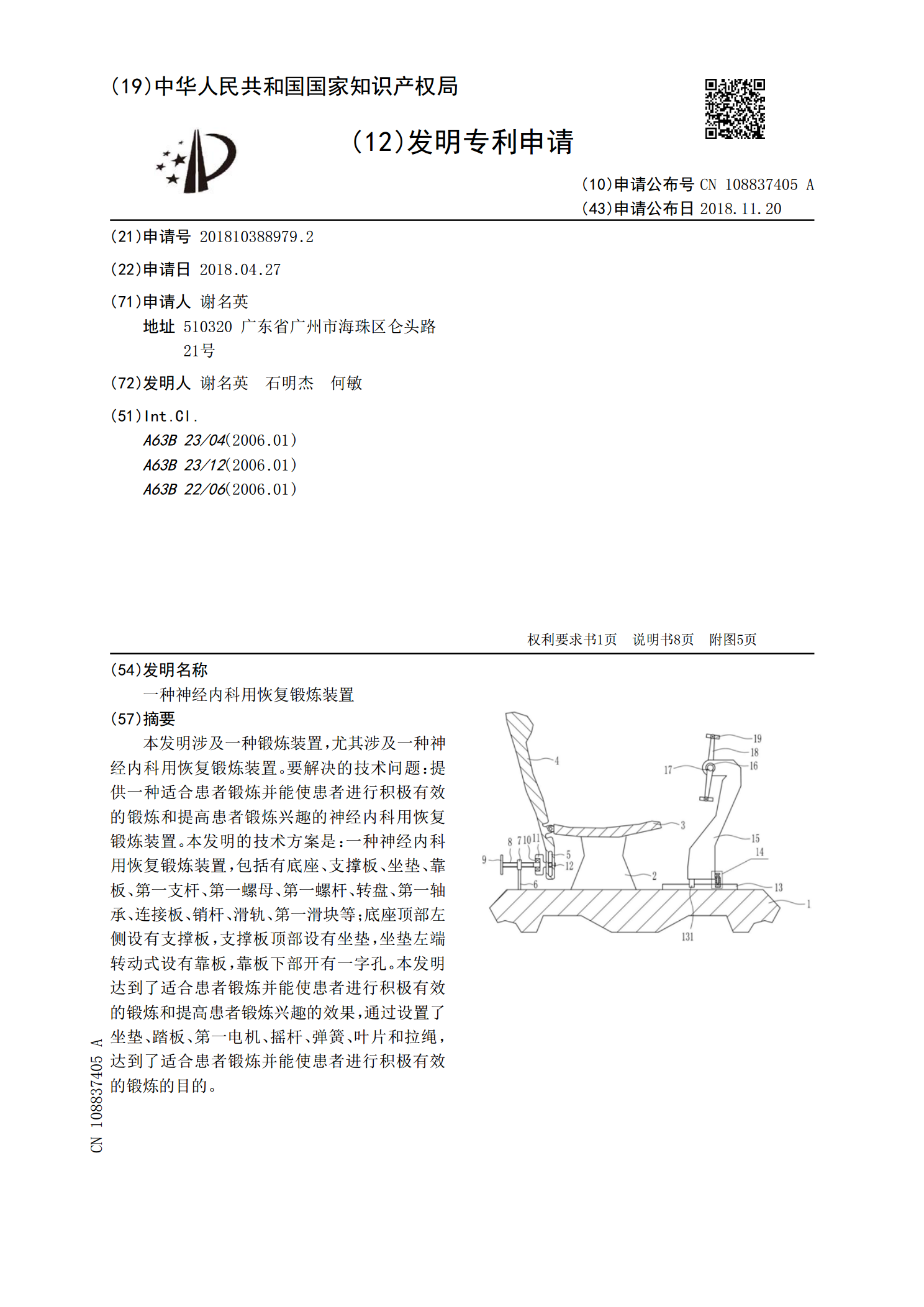
一种神经内科用恢复锻炼装置.pdf
本发明涉及一种锻炼装置,尤其涉及一种神经内科用恢复锻炼装置。要解决的技术问题:提供一种适合患者锻炼并能使患者进行积极有效的锻炼和提高患者锻炼兴趣的神经内科用恢复锻炼装置。本发明的技术方案是:一种神经内科用恢复锻炼装置,包括有底座、支撑板、坐垫、靠板、第一支杆、第一螺母、第一螺杆、转盘、第一轴承、连接板、销杆、滑轨、第一滑块等;底座顶部左侧设有支撑板,支撑板顶部设有坐垫,坐垫左端转动式设有靠板,靠板下部开有一字孔。本发明达到了适合患者锻炼并能使患者进行积极有效的锻炼和提高患者锻炼兴趣的效果,通过设置了坐垫、

一种医疗用腰部锻炼装置.pdf
本发明公开了一种医疗用腰部锻炼装置,包括底座,底座的上端一侧设有壳体,壳体内底部设有电机,壳体的一侧设有箱体,壳体的一侧上端对称设有握杆,箱体内设有活动板,活动板上开设有开槽,开槽内设有滑块且滑块的中心位置穿插设有第一连杆,第一连杆的一端延伸至滑块的外侧设有第二连杆,第二连杆远离第一连杆的一端设有第一固定杆,第一固定杆远离第二连杆的一端依次贯穿箱体、壳体与位于壳体内部的电机相连接,活动板上位于开槽的上方穿插设有第二固定杆,第二固定杆位于活动板的一侧上套设有齿轮。有益效果:提高锻炼的舒适性,在锻炼的同时享受

一种医疗用肩部恢复训练装置.pdf
本发明公开了一种医疗用肩部恢复训练装置,包括固定板,所述固定板的一侧底部固定连接有底板,所述底板的上表面嵌接有缓冲弹簧,所述固定板的一侧顶端固定连接有顶板,所述顶板的底面固定连接有固定杆,所述固定杆的一端固定连接有定滑轮,所述定滑轮的底部通过钢丝绳转动连接有牵引物,所述固定板的一侧嵌接有滑板,所述保护棉的一侧设置有嵌接块,所述保护棉的另一侧设置有嵌接槽。该种发明设计合理,功能实用,通过在保护棉的表面设置有卡块和卡槽,可以对使用者的身体起到固定的作用,进而可以达到保护使用者身体的效果,通过在保护棉的表面设置