
一种改进型智能捕捞机械手臂.pdf

邻家****曼玉


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种改进型智能捕捞机械手臂.pdf
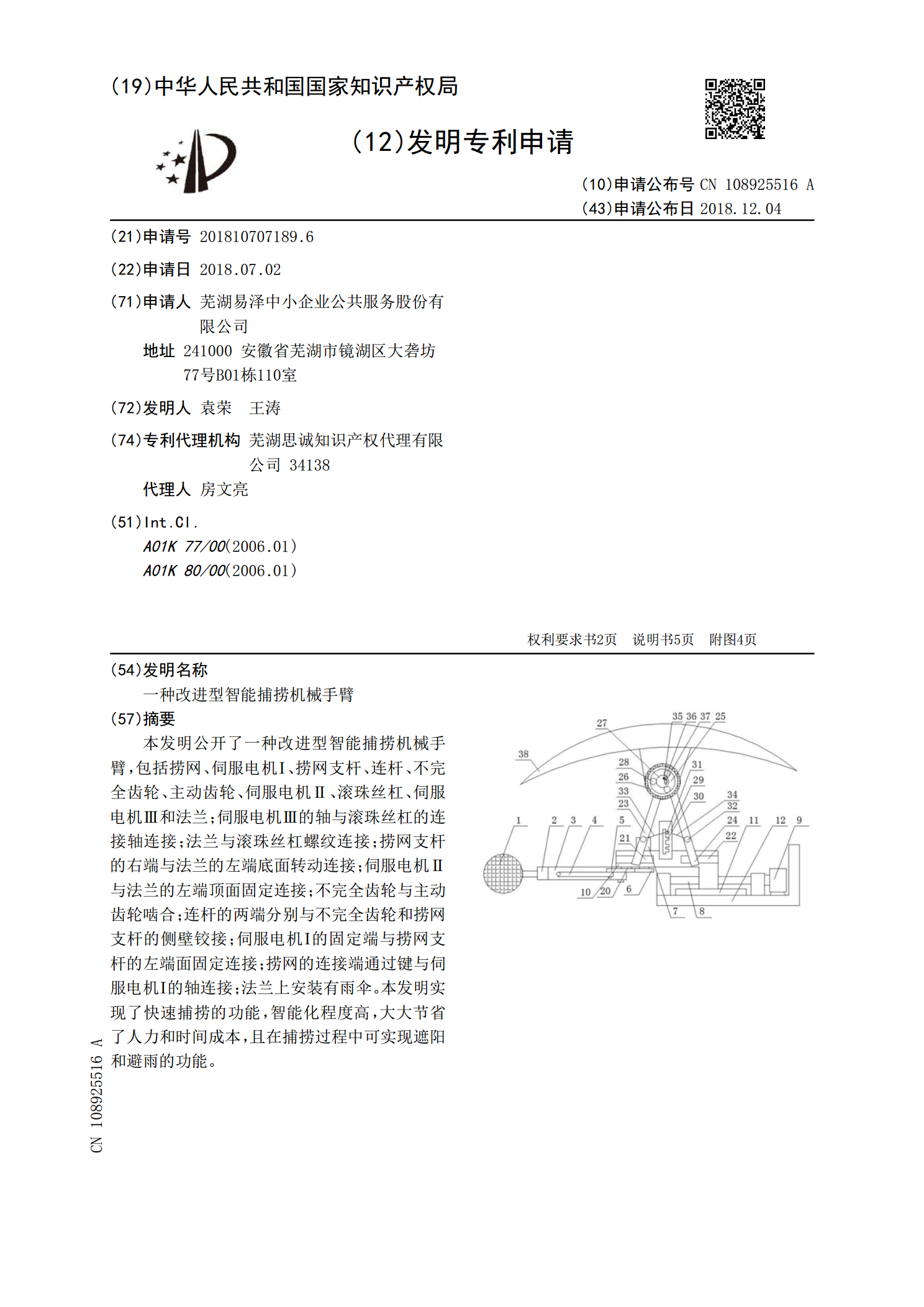
本发明公开了一种改进型智能捕捞机械手臂,包括捞网、伺服电机Ⅰ、捞网支杆、连杆、不完全齿轮、主动齿轮、伺服电机Ⅱ、滚珠丝杠、伺服电机Ⅲ和法兰;伺服电机Ⅲ的轴与滚珠丝杠的连接轴连接;法兰与滚珠丝杠螺纹连接;捞网支杆的右端与法兰的左端底面转动连接;伺服电机Ⅱ与法兰的左端顶面固定连接;不完全齿轮与主动齿轮啮合;连杆的两端分别与不完全齿轮和捞网支杆的侧壁铰接;伺服电机Ⅰ的固定端与捞网支杆的左端面固定连接;捞网的连接端通过键与伺服电机Ⅰ的轴连接;法兰上安装有雨伞。本发明实现了快速捕捞的功能,智能化程度高,大大节省了人

一种智能捕捞机械手臂.pdf
本发明公开了一种智能捕捞机械手臂,包括捞网、伺服电机Ⅰ、捞网支杆、连杆、不完全齿轮、主动齿轮、伺服电机Ⅱ、滚珠丝杠、伺服电机Ⅲ、法兰和导轨;伺服电机Ⅲ的轴与滚珠丝杠的连接轴连接;法兰与滚珠丝杠螺纹连接,法兰的底端滑动连接在导轨内;捞网支杆的右端与法兰的左端底面转动连接;伺服电机Ⅱ与法兰的左端顶面固定连接;主动齿轮与伺服电机Ⅱ的轴连接;不完全齿轮与法兰的左端底面转动连接,不完全齿轮与主动齿轮啮合;连杆的两端分别与不完全齿轮和捞网支杆的侧壁铰接;伺服电机Ⅰ的固定端与捞网支杆的左端面固定连接;捞网的连接端通过键

一种多维调节式智能捕捞机械手臂.pdf
本发明公开了一种智能捕捞机械手臂,包括捞网、伺服电机Ⅰ、捞网支杆、连杆、不完全齿轮、主动齿轮、伺服电机Ⅱ、滚珠丝杠、伺服电机Ⅲ和法兰;伺服电机Ⅲ的轴与滚珠丝杠的连接轴连接;法兰与滚珠丝杠螺纹连接;捞网支杆的右端与法兰的左端底面转动连接;伺服电机Ⅱ与法兰的左端顶面固定连接;主动齿轮与伺服电机Ⅱ的轴连接;不完全齿轮与法兰的左端底面转动连接,不完全齿轮与主动齿轮啮合;连杆的两端分别与不完全齿轮和捞网支杆的侧壁铰接;伺服电机Ⅰ的固定端与捞网支杆的左端连接;捞网的连接端通过键与伺服电机Ⅰ的轴连接;该装置的右侧连接有
一种智能浇注机械手臂.pdf
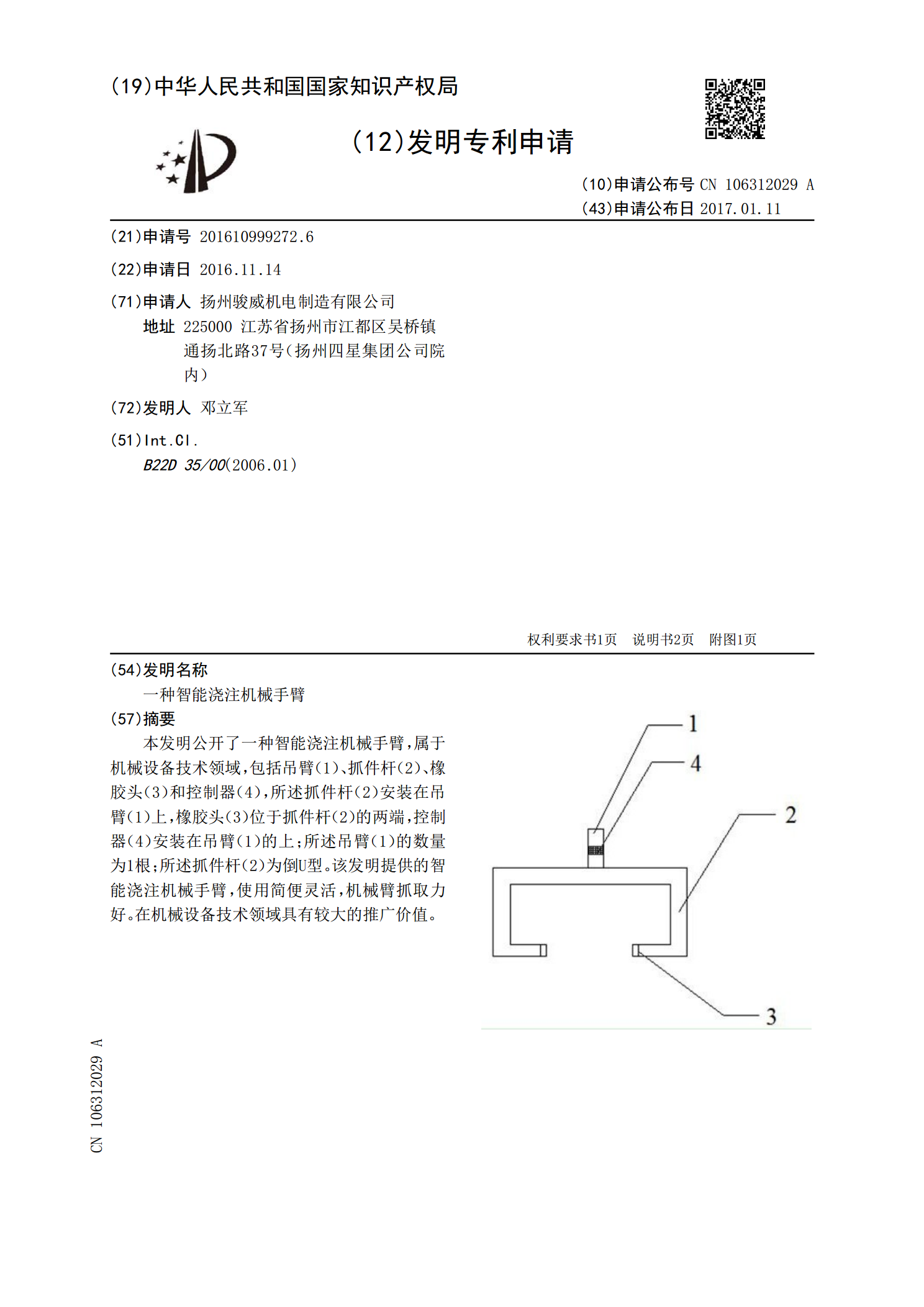
本发明公开了一种智能浇注机械手臂,属于机械设备技术领域,包括吊臂(1)、抓件杆(2)、橡胶头(3)和控制器(4),所述抓件杆(2)安装在吊臂(1)上,橡胶头(3)位于抓件杆(2)的两端,控制器(4)安装在吊臂(1)的上;所述吊臂(1)的数量为1根;所述抓件杆(2)为倒U型。该发明提供的智能浇注机械手臂,使用简便灵活,机械臂抓取力好。在机械设备技术领域具有较大的推广价值。

一种桌面级智能机械手臂.pdf
本发明公开了一种桌面级智能机械手臂,包括臂体和爪体,所述第二转轴的外壁设有第二皮带轮,所述第二皮带轮与第二转轴套接相连,所述第二皮带轮的外围设有皮带,所述第二皮带轮通过皮带与第一皮带轮相连,所述第一皮带轮的内壁右端设有第一转轴,所述第一皮带轮与第一转轴套接相连,所述第一皮带轮的左端设有丝杠。该桌面级智能机械手臂,通过支脚与桌面的配合,通过第一皮带轮与丝杠的配合,通过丝母与底座的配合,通过底座与第一滑块的配合,通过第一滑块与第一滑槽的配合,通过底座与转杆的配合,通过转杆与臂体的配合,通过臂体与爪体的配合,可