
一种天线罩测试转台.pdf

代瑶****zy

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种天线罩测试转台.pdf
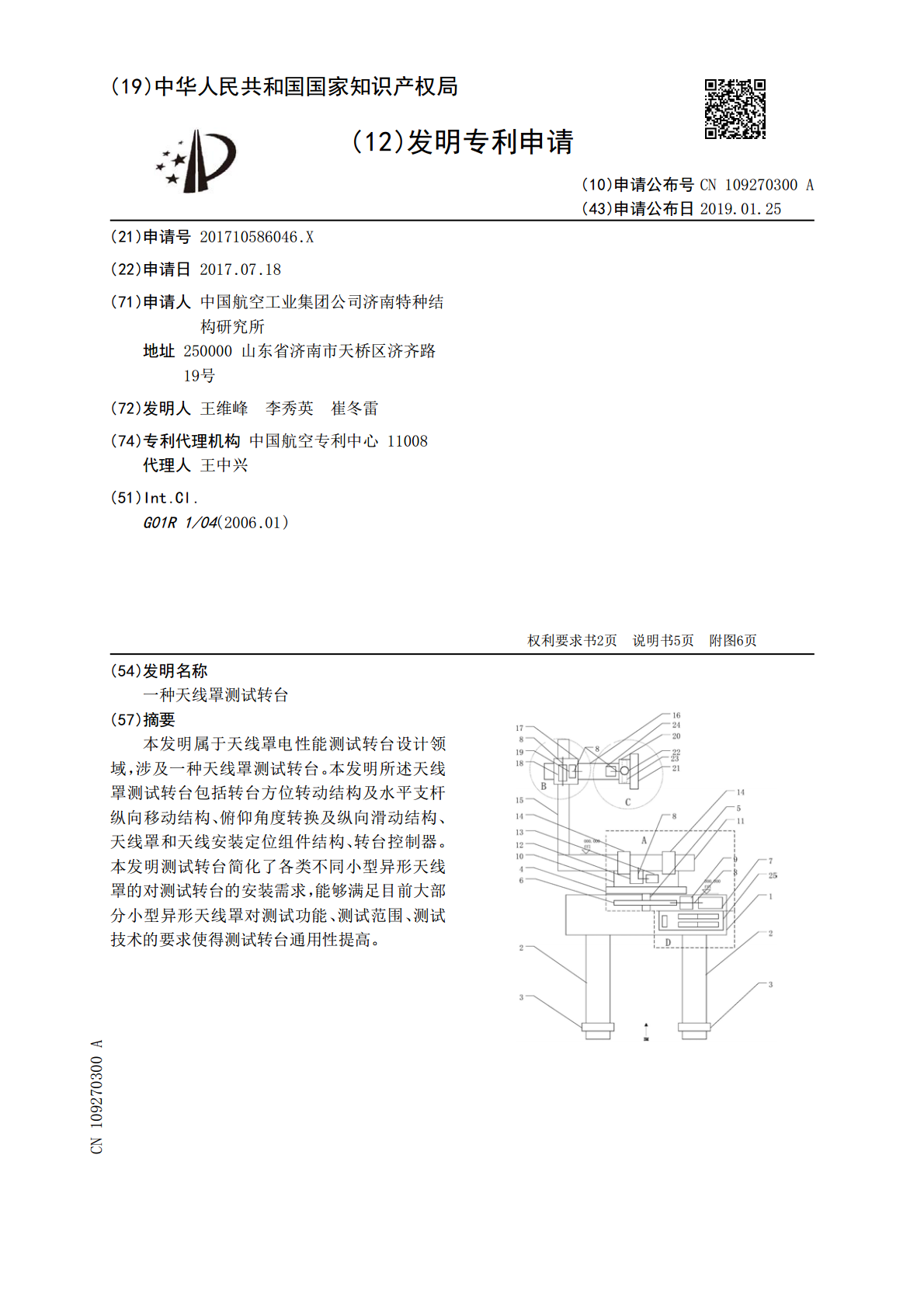
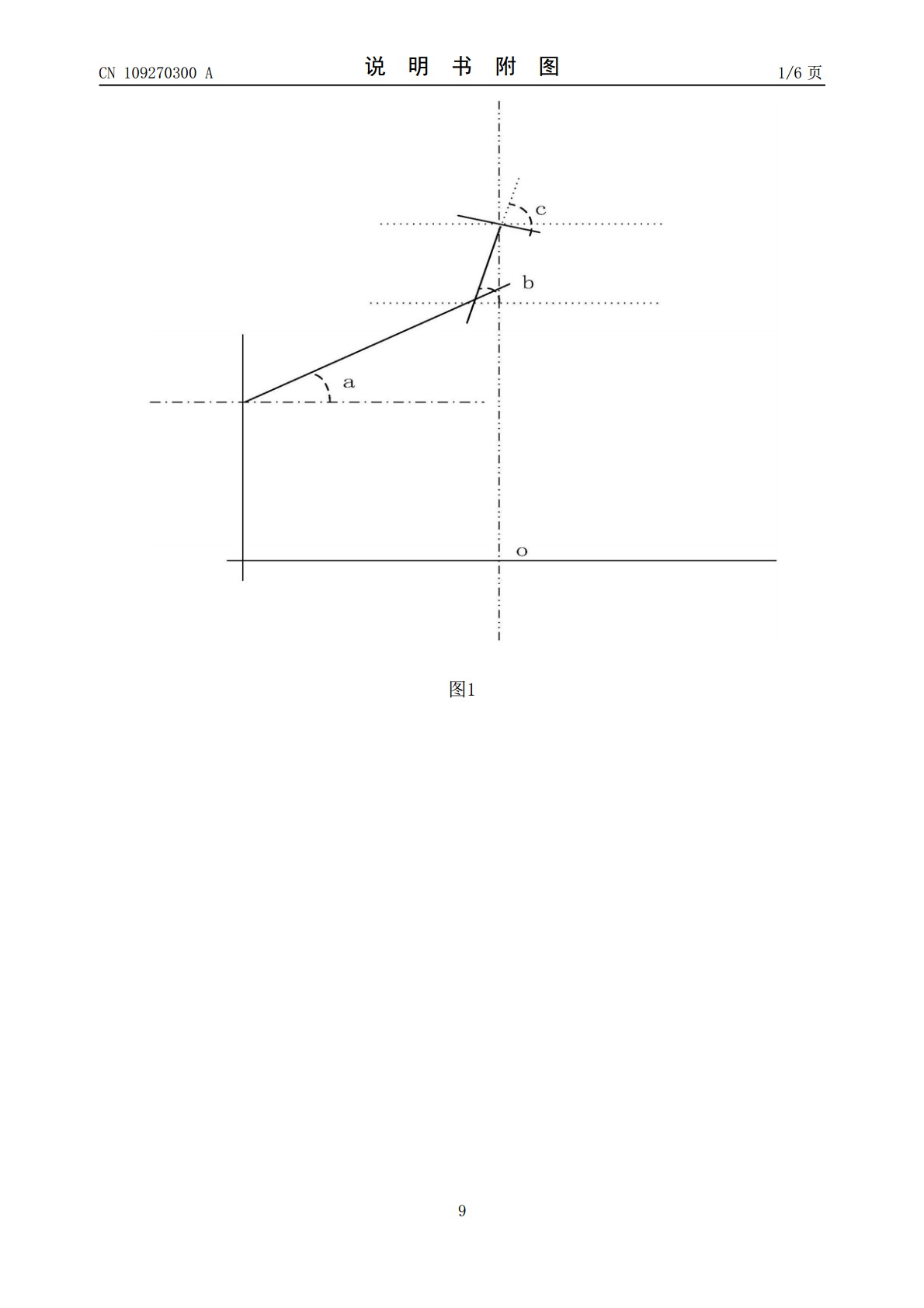
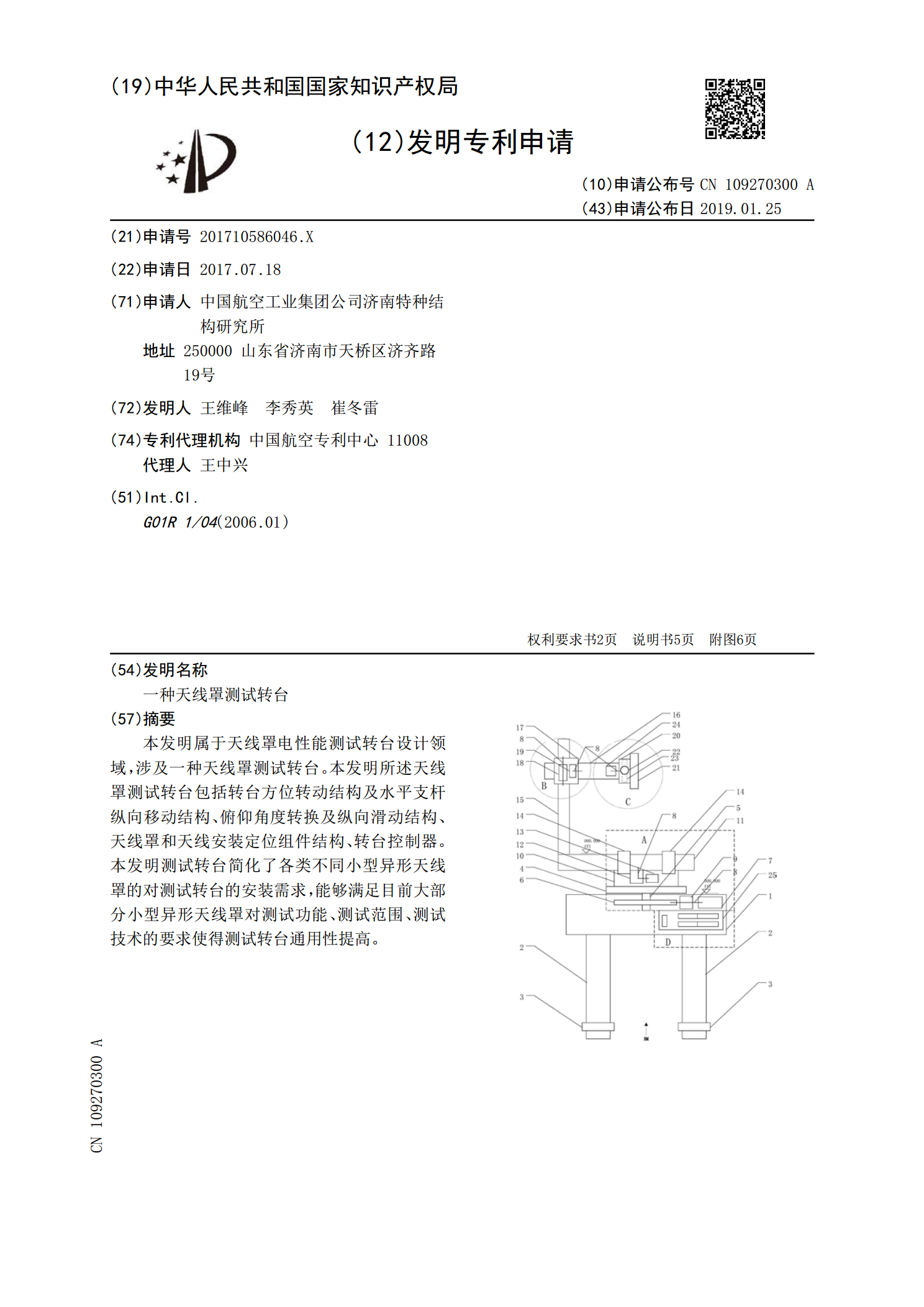
本发明属于天线罩电性能测试转台设计领域,涉及一种天线罩测试转台。本发明所述天线罩测试转台包括转台方位转动结构及水平支杆纵向移动结构、俯仰角度转换及纵向滑动结构、天线罩和天线安装定位组件结构、转台控制器。本发明测试转台简化了各类不同小型异形天线罩的对测试转台的安装需求,能够满足目前大部分小型异形天线罩对测试功能、测试范围、测试技术的要求使得测试转台通用性提高。
一种用于天线罩测试的转台.pdf
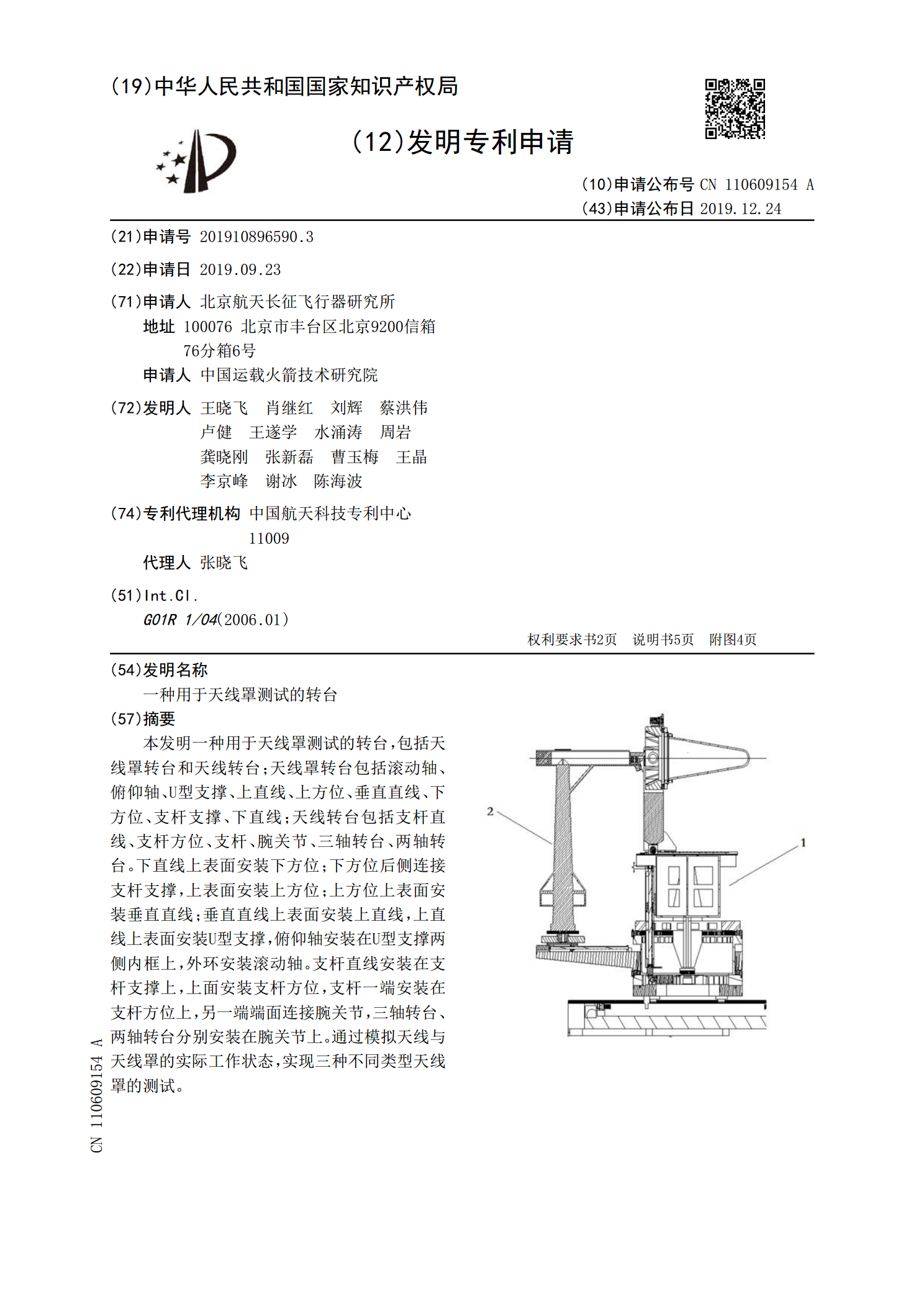
本发明一种用于天线罩测试的转台,包括天线罩转台和天线转台;天线罩转台包括滚动轴、俯仰轴、U型支撑、上直线、上方位、垂直直线、下方位、支杆支撑、下直线;天线转台包括支杆直线、支杆方位、支杆、腕关节、三轴转台、两轴转台。下直线上表面安装下方位;下方位后侧连接支杆支撑,上表面安装上方位;上方位上表面安装垂直直线;垂直直线上表面安装上直线,上直线上表面安装U型支撑,俯仰轴安装在U型支撑两侧内框上,外环安装滚动轴。支杆直线安装在支杆支撑上,上面安装支杆方位,支杆一端安装在支杆方位上,另一端端面连接腕关节,三轴转台、
一种天线罩电性能测试智能转台.pdf
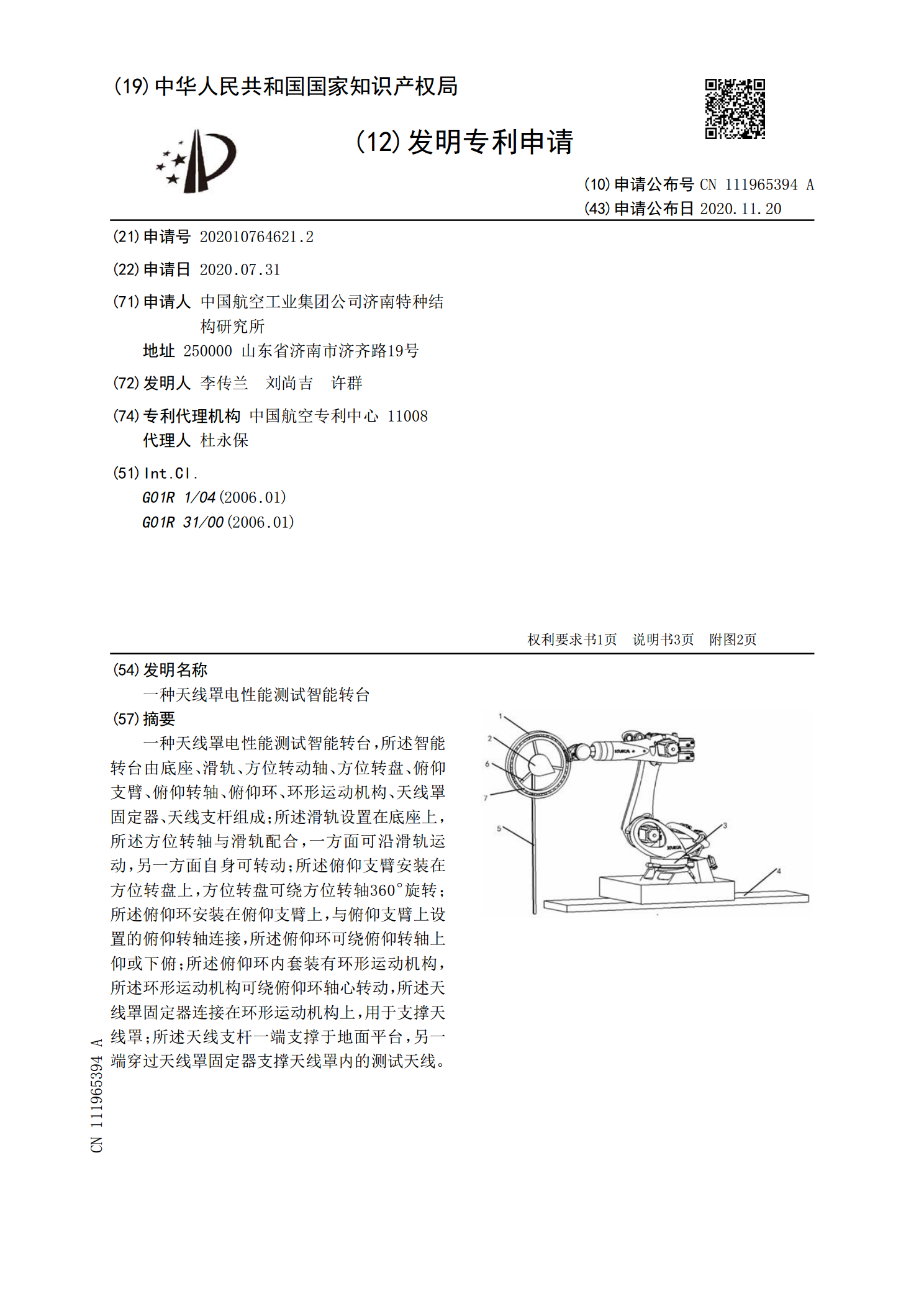
一种天线罩电性能测试智能转台,所述智能转台由底座、滑轨、方位转动轴、方位转盘、俯仰支臂、俯仰转轴、俯仰环、环形运动机构、天线罩固定器、天线支杆组成;所述滑轨设置在底座上,所述方位转轴与滑轨配合,一方面可沿滑轨运动,另一方面自身可转动;所述俯仰支臂安装在方位转盘上,方位转盘可绕方位转轴360°旋转;所述俯仰环安装在俯仰支臂上,与俯仰支臂上设置的俯仰转轴连接,所述俯仰环可绕俯仰转轴上仰或下俯;所述俯仰环内套装有环形运动机构,所述环形运动机构可绕俯仰环轴心转动,所述天线罩固定器连接在环形运动机构上,用于支撑天线
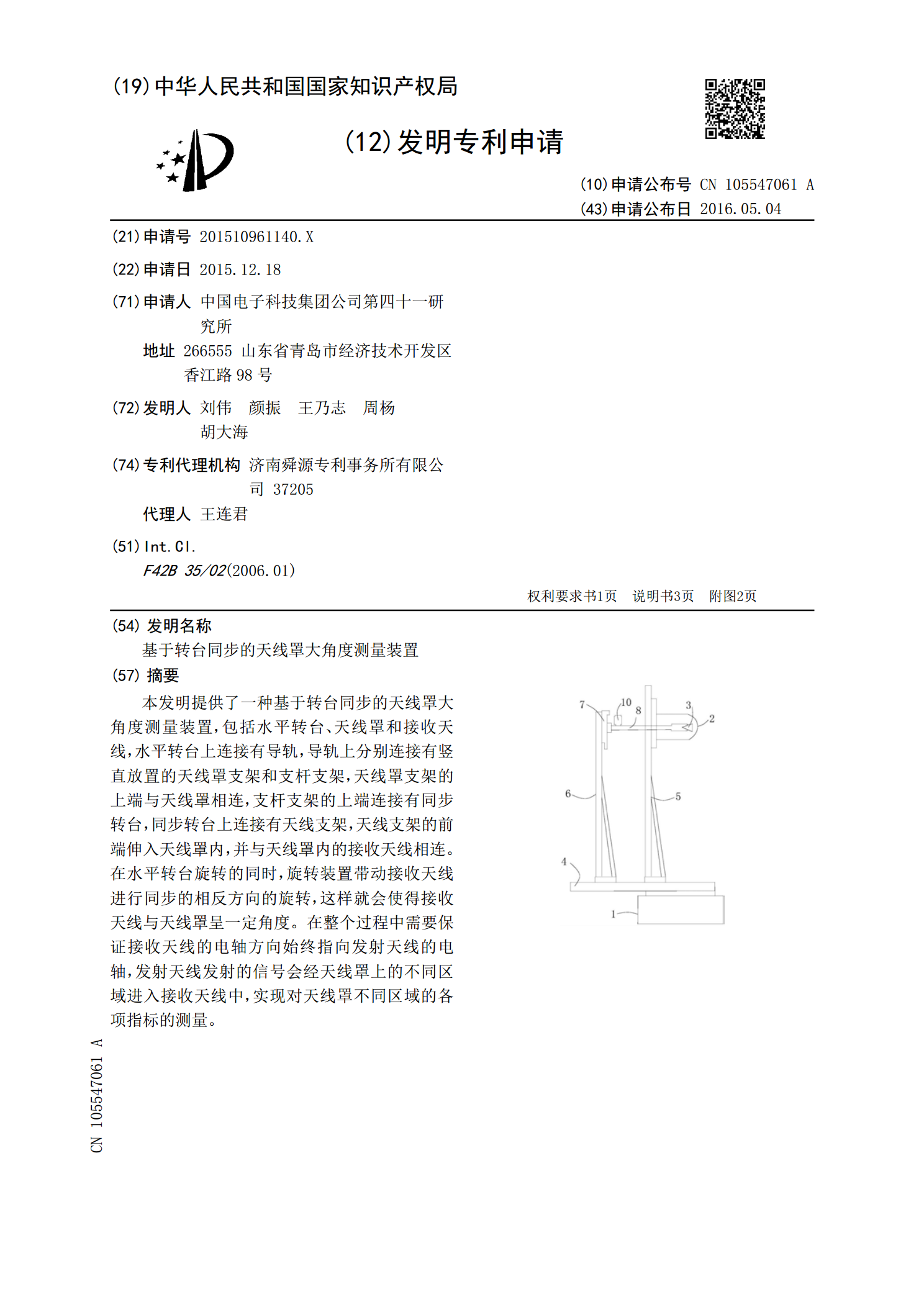
基于转台同步的天线罩大角度测量装置.pdf
本发明提供了一种基于转台同步的天线罩大角度测量装置,包括水平转台、天线罩和接收天线,水平转台上连接有导轨,导轨上分别连接有竖直放置的天线罩支架和支杆支架,天线罩支架的上端与天线罩相连,支杆支架的上端连接有同步转台,同步转台上连接有天线支架,天线支架的前端伸入天线罩内,并与天线罩内的接收天线相连。在水平转台旋转的同时,旋转装置带动接收天线进行同步的相反方向的旋转,这样就会使得接收天线与天线罩呈一定角度。在整个过程中需要保证接收天线的电轴方向始终指向发射天线的电轴,发射天线发射的信号会经天线罩上的不同区域进入
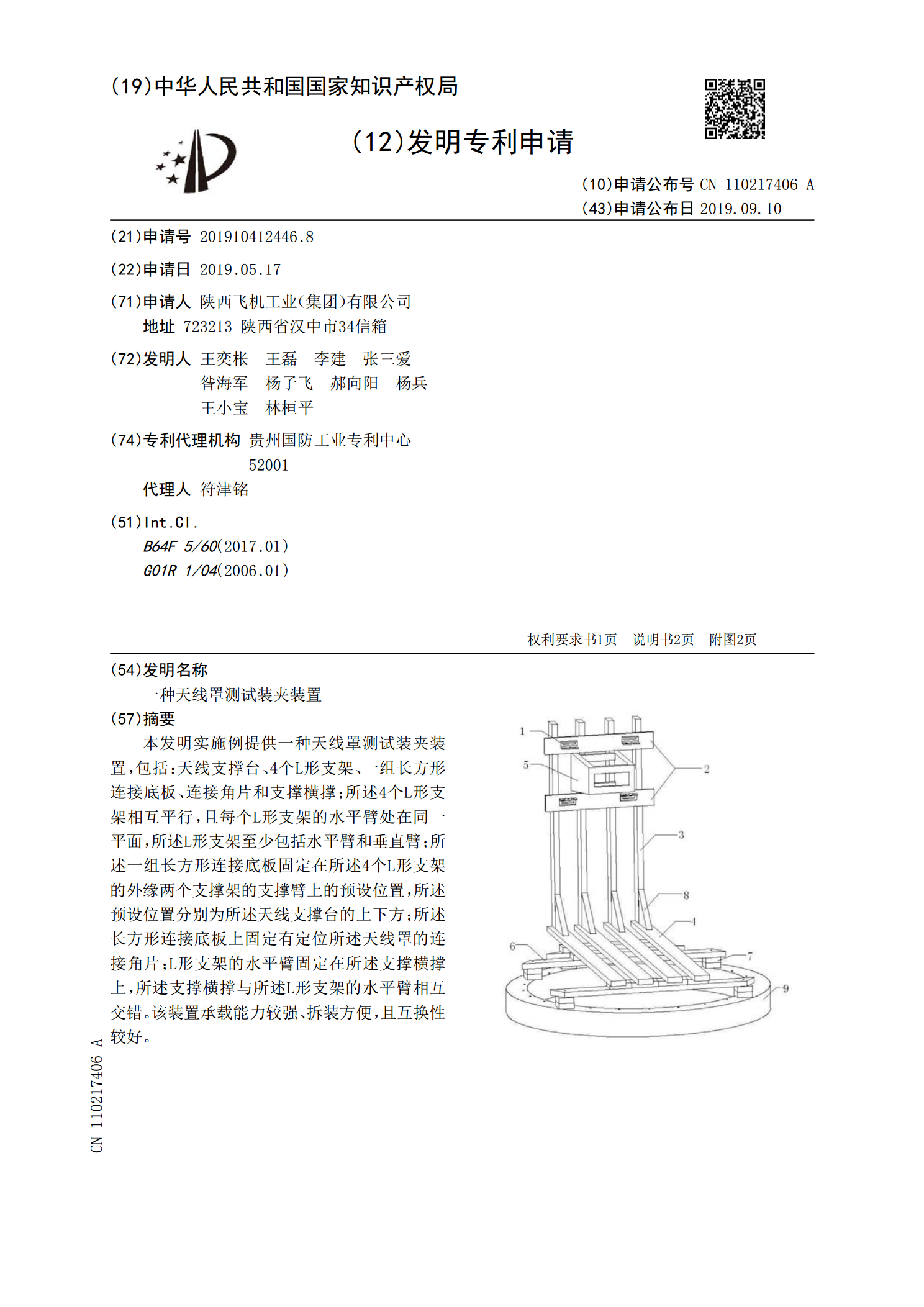
一种天线罩测试装夹装置.pdf
本发明实施例提供一种天线罩测试装夹装置,包括:天线支撑台、4个L形支架、一组长方形连接底板、连接角片和支撑横撑;所述4个L形支架相互平行,且每个L形支架的水平臂处在同一平面,所述L形支架至少包括水平臂和垂直臂;所述一组长方形连接底板固定在所述4个L形支架的外缘两个支撑架的支撑臂上的预设位置,所述预设位置分别为所述天线支撑台的上下方;所述长方形连接底板上固定有定位所述天线罩的连接角片;L形支架的水平臂固定在所述支撑横撑上,所述支撑横撑与所述L形支架的水平臂相互交错。该装置承载能力较强、拆装方便,且互换性较好