
一种基于深度学习视觉检测的非烟物质检测方法.pdf

又珊****ck

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度学习视觉检测的非烟物质检测方法.pdf
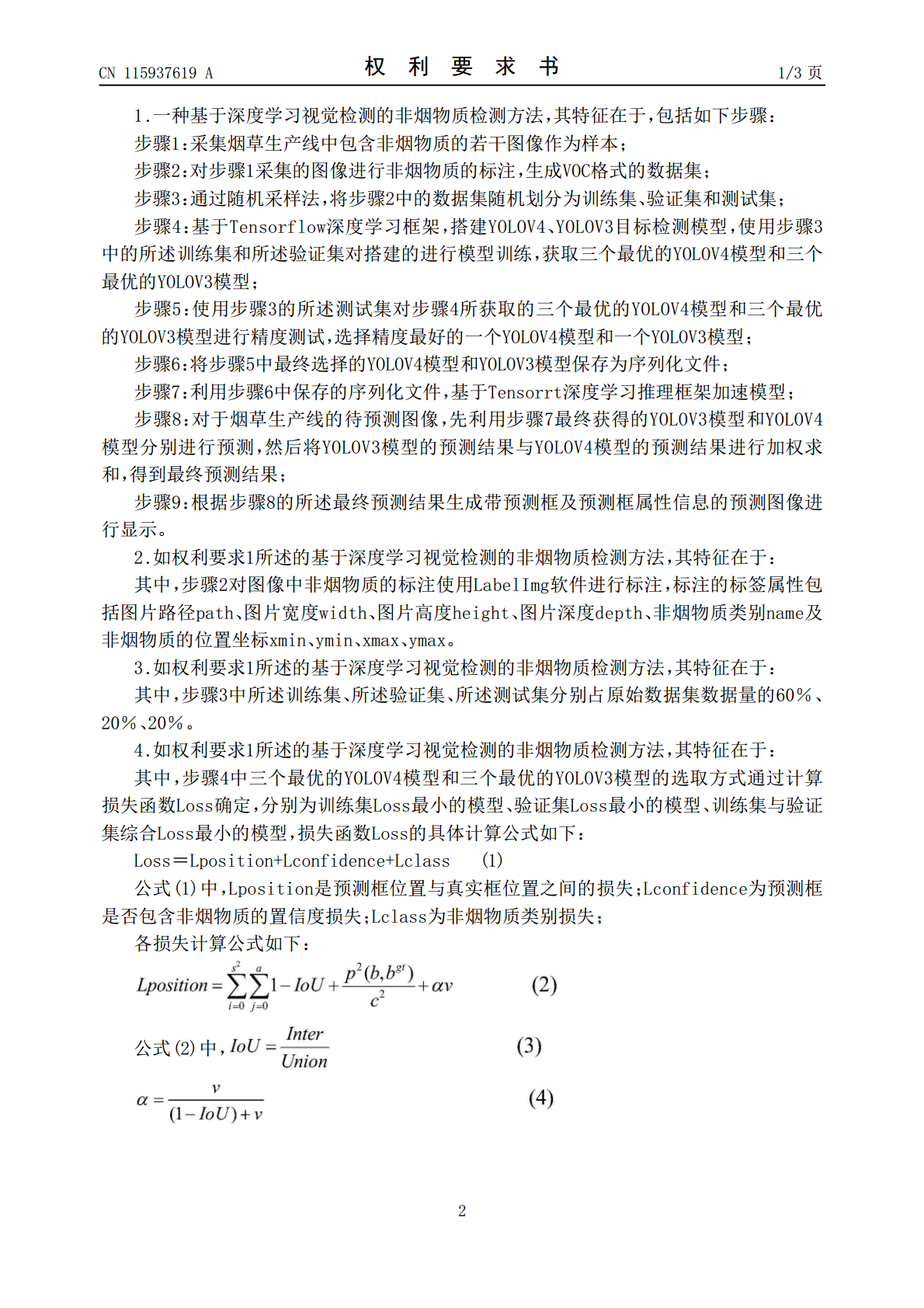
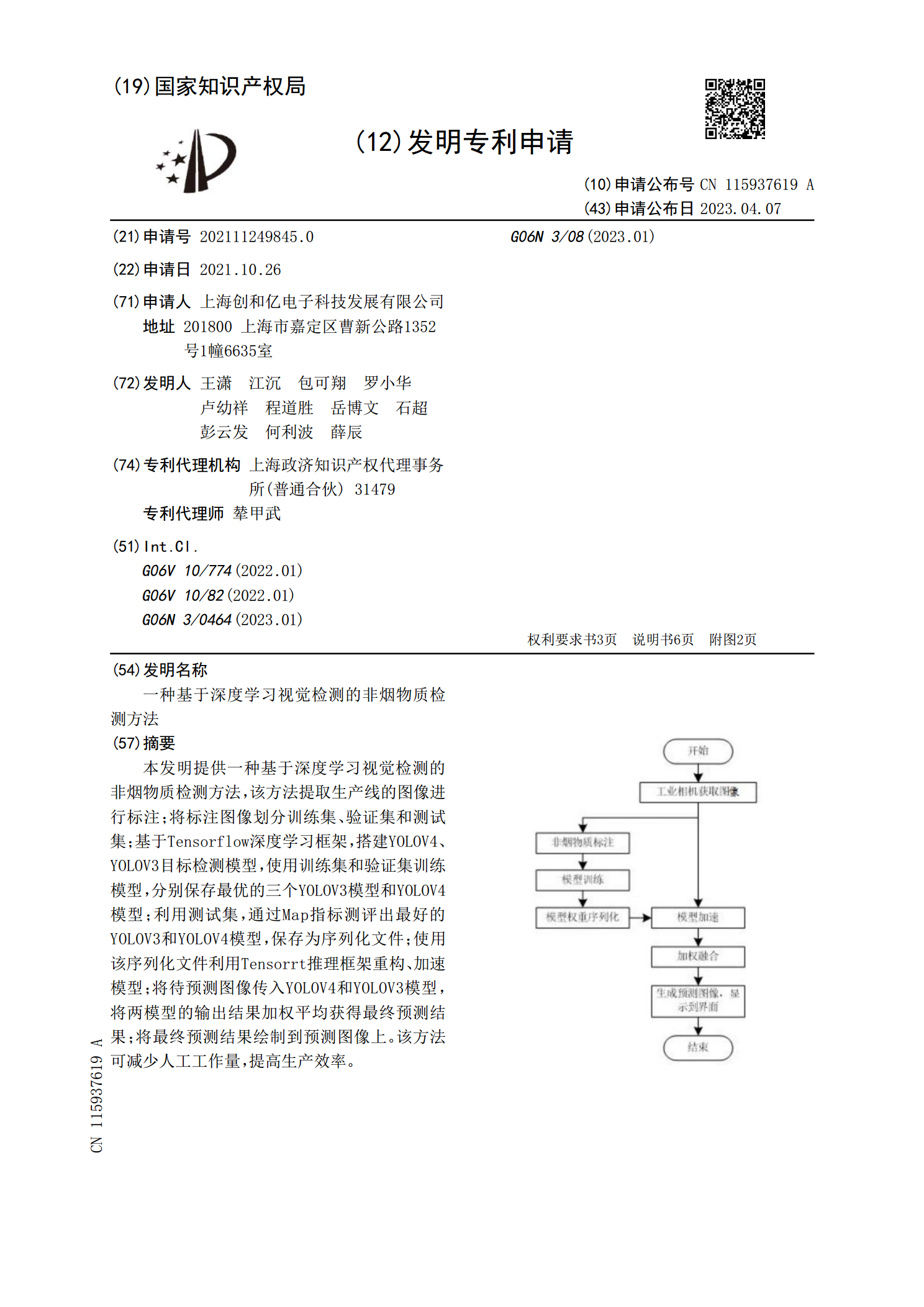
本发明提供一种基于深度学习视觉检测的非烟物质检测方法,该方法提取生产线的图像进行标注;将标注图像划分训练集、验证集和测试集;基于Tensorflow深度学习框架,搭建YOLOV4、YOLOV3目标检测模型,使用训练集和验证集训练模型,分别保存最优的三个YOLOV3模型和YOLOV4模型;利用测试集,通过Map指标测评出最好的YOLOV3和YOLOV4模型,保存为序列化文件;使用该序列化文件利用Tensorrt推理框架重构、加速模型;将待预测图像传入YOLOV4和YOLOV3模型,将两模型的输出结果加权平均
一种基于深度学习的全景视觉水面目标检测方法.pdf
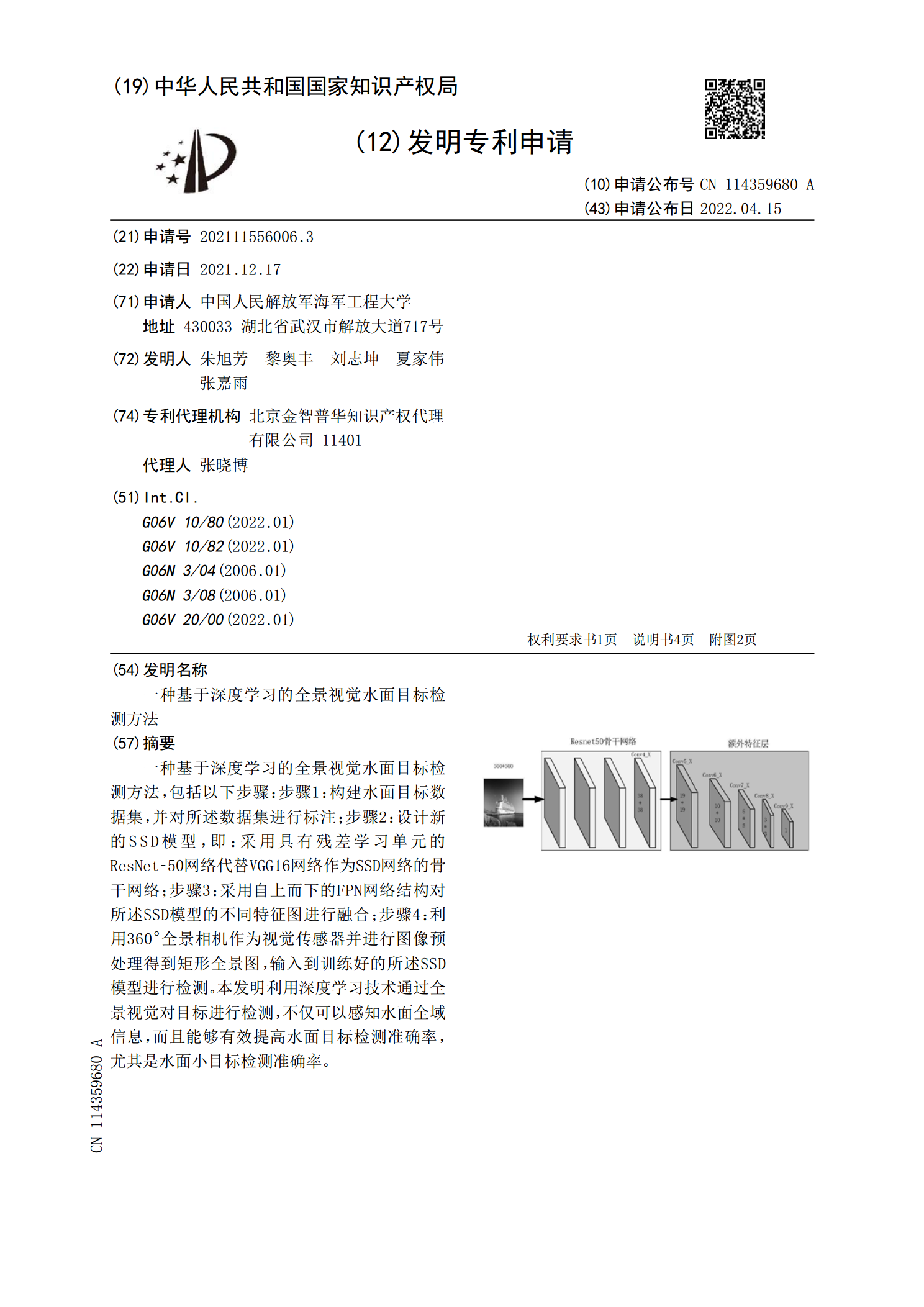
一种基于深度学习的全景视觉水面目标检测方法,包括以下步骤:步骤1:构建水面目标数据集,并对所述数据集进行标注;步骤2:设计新的SSD模型,即:采用具有残差学习单元的ResNet?50网络代替VGG16网络作为SSD网络的骨干网络;步骤3:采用自上而下的FPN网络结构对所述SSD模型的不同特征图进行融合;步骤4:利用360°全景相机作为视觉传感器并进行图像预处理得到矩形全景图,输入到训练好的所述SSD模型进行检测。本发明利用深度学习技术通过全景视觉对目标进行检测,不仅可以感知水面全域信息,而且能够有效提高水
一种基于深度学习的蓝宝石生长缺陷视觉检测方法.pdf
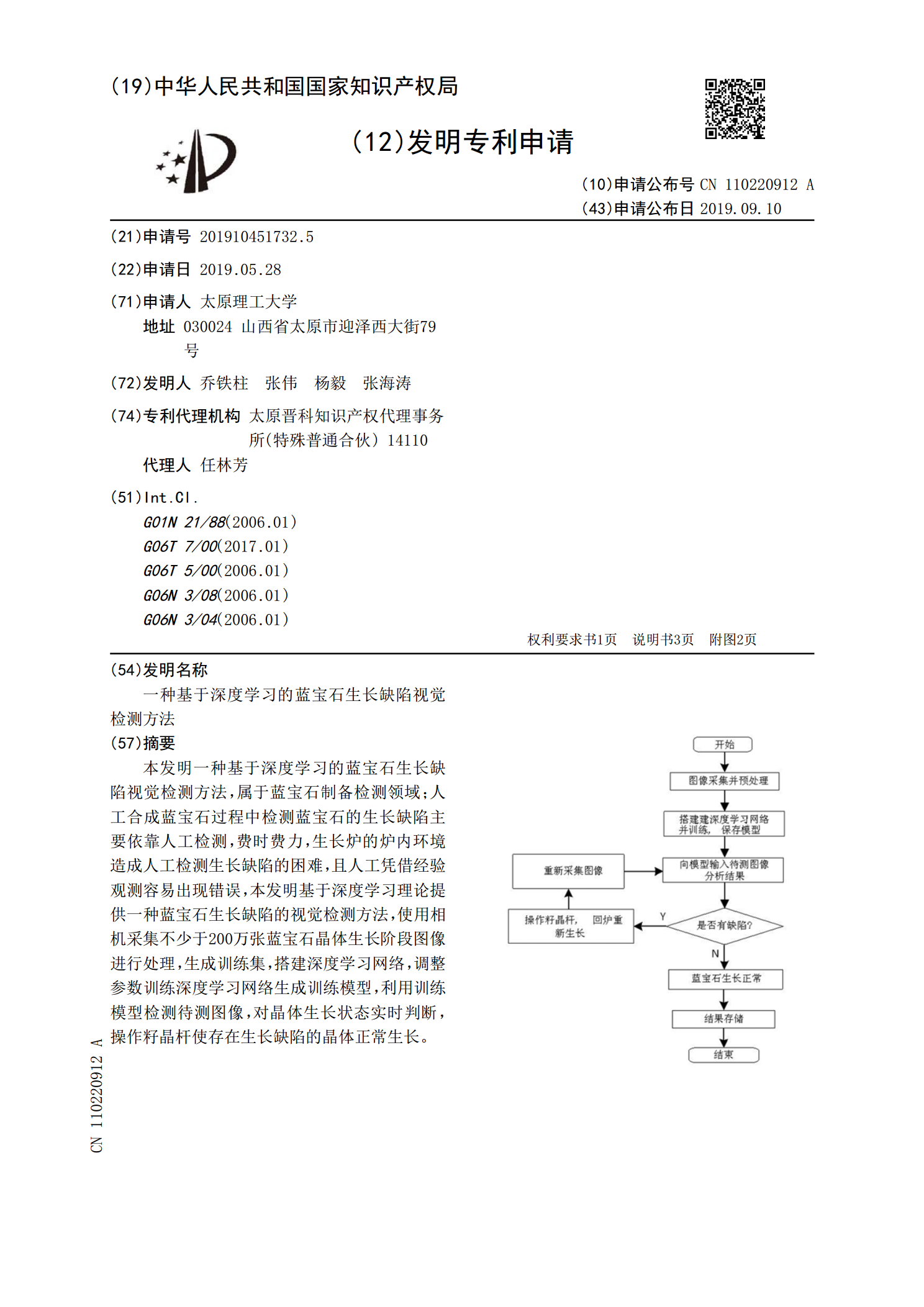
本发明一种基于深度学习的蓝宝石生长缺陷视觉检测方法,属于蓝宝石制备检测领域;人工合成蓝宝石过程中检测蓝宝石的生长缺陷主要依靠人工检测,费时费力,生长炉的炉内环境造成人工检测生长缺陷的困难,且人工凭借经验观测容易出现错误,本发明基于深度学习理论提供一种蓝宝石生长缺陷的视觉检测方法,使用相机采集不少于200万张蓝宝石晶体生长阶段图像进行处理,生成训练集,搭建深度学习网络,调整参数训练深度学习网络生成训练模型,利用训练模型检测待测图像,对晶体生长状态实时判断,操作籽晶杆使存在生长缺陷的晶体正常生长。
基于深度学习的龙虾在线定位视觉检测方法和系统.pdf
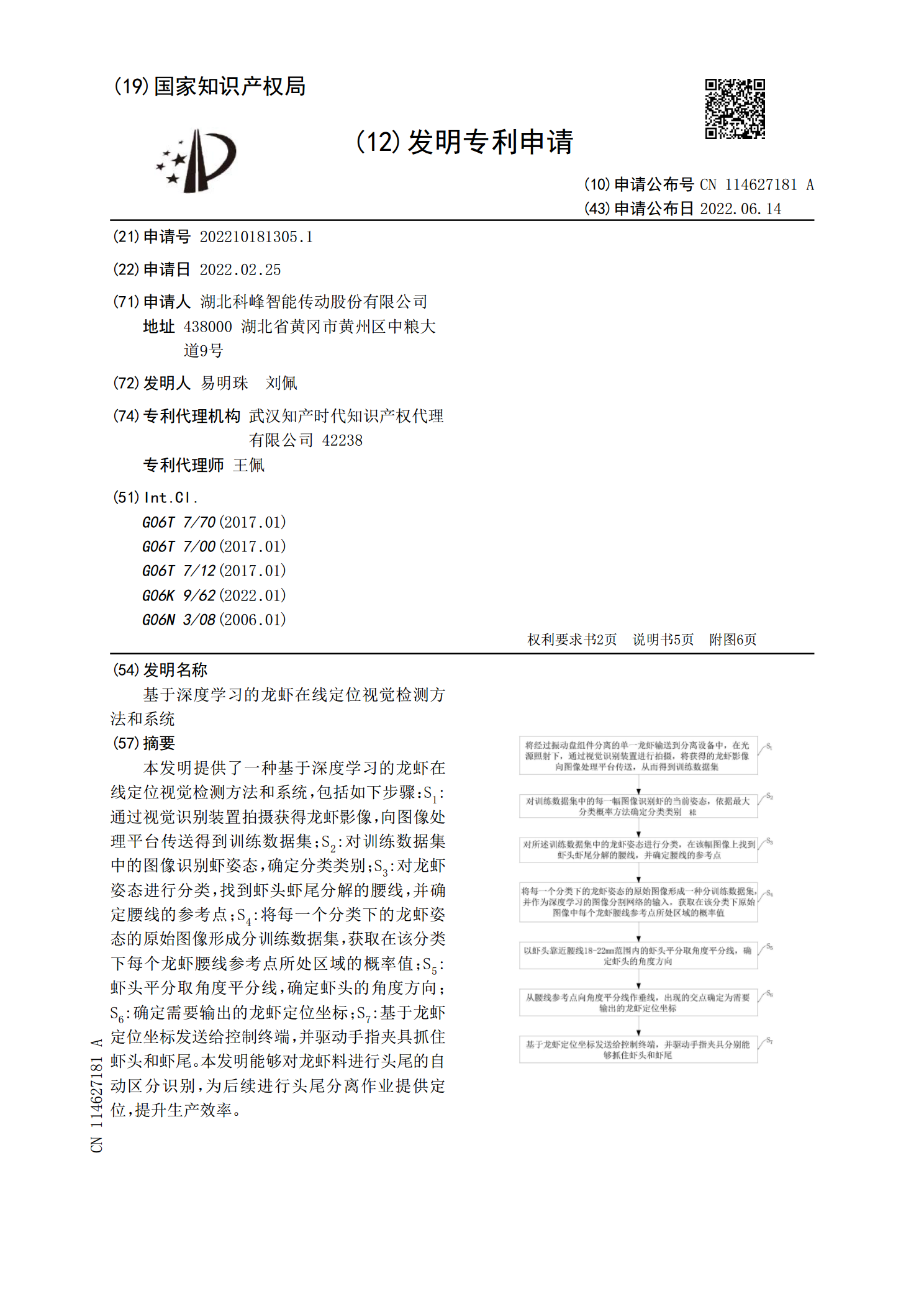
本发明提供了一种基于深度学习的龙虾在线定位视觉检测方法和系统,包括如下步骤:S<base:Sub>1</base:Sub>:通过视觉识别装置拍摄获得龙虾影像,向图像处理平台传送得到训练数据集;S<base:Sub>2</base:Sub>:对训练数据集中的图像识别虾姿态,确定分类类别;S<base:Sub>3</base:Sub>:对龙虾姿态进行分类,找到虾头虾尾分解的腰线,并确定腰线的参考点;S<base:Sub>4</base:Sub>:将每一个分类下的龙虾姿态的原始图像形成分训练数据集,获取在该分类
基于计算机视觉和深度学习的非接触式血压检测系统.pdf
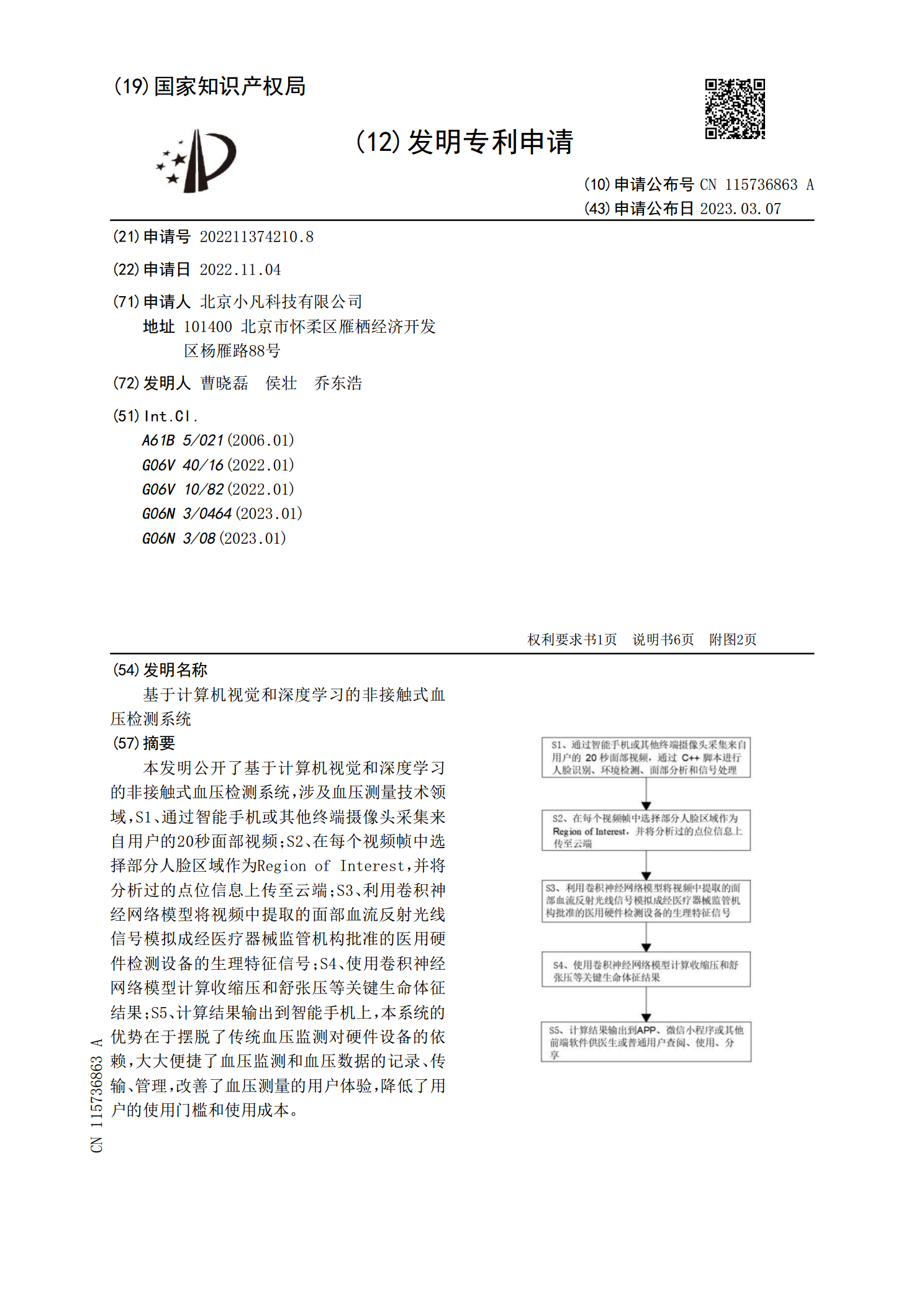
本发明公开了基于计算机视觉和深度学习的非接触式血压检测系统,涉及血压测量技术领域,S1、通过智能手机或其他终端摄像头采集来自用户的20秒面部视频;S2、在每个视频帧中选择部分人脸区域作为RegionofInterest,并将分析过的点位信息上传至云端;S3、利用卷积神经网络模型将视频中提取的面部血流反射光线信号模拟成经医疗器械监管机构批准的医用硬件检测设备的生理特征信号;S4、使用卷积神经网络模型计算收缩压和舒张压等关键生命体征结果;S5、计算结果输出到智能手机上,本系统的优势在于摆脱了传统血压监测对