
一种四杆三级串联力放大机构.pdf

一条****ee


1/8
2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种四杆三级串联力放大机构.pdf
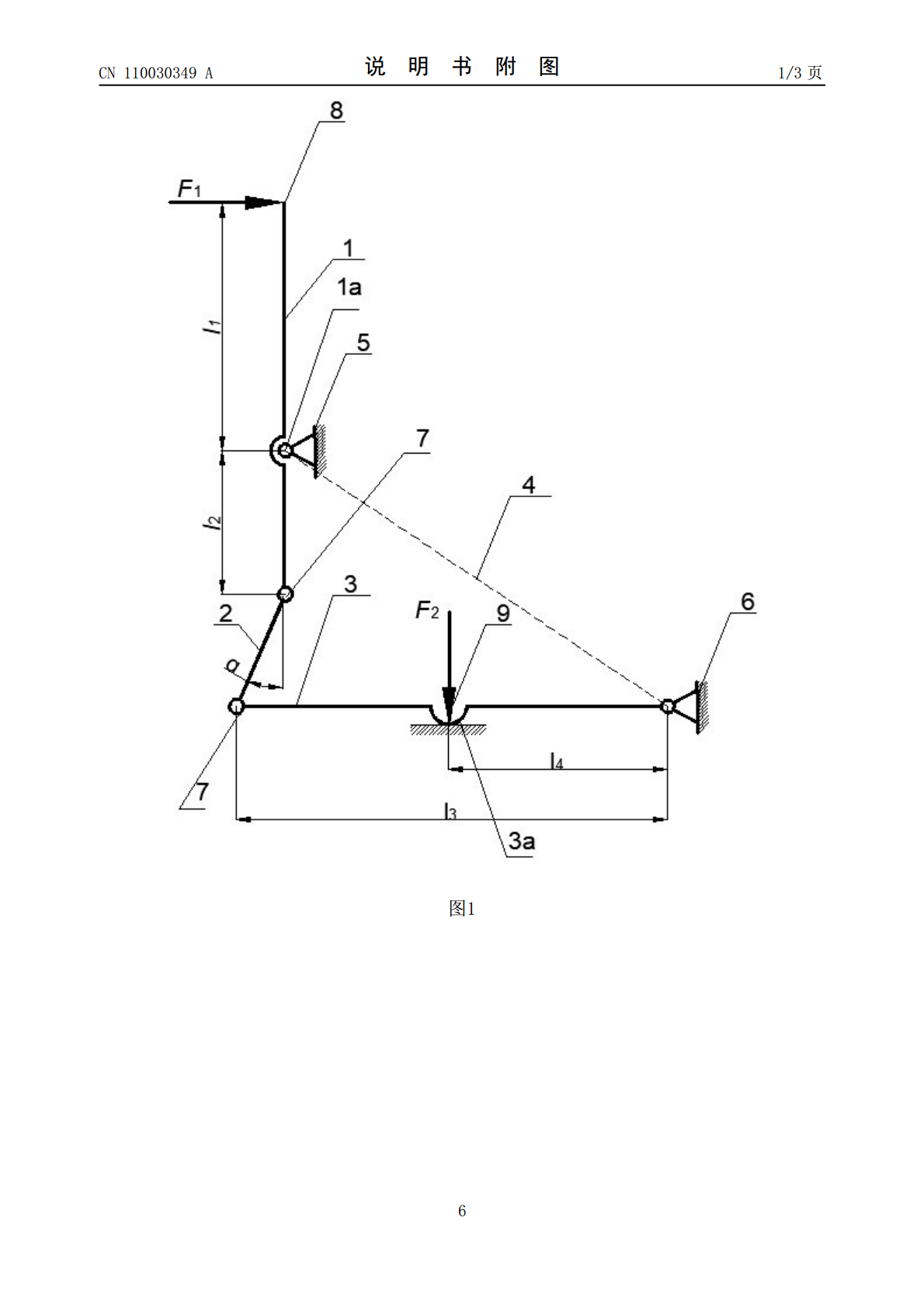
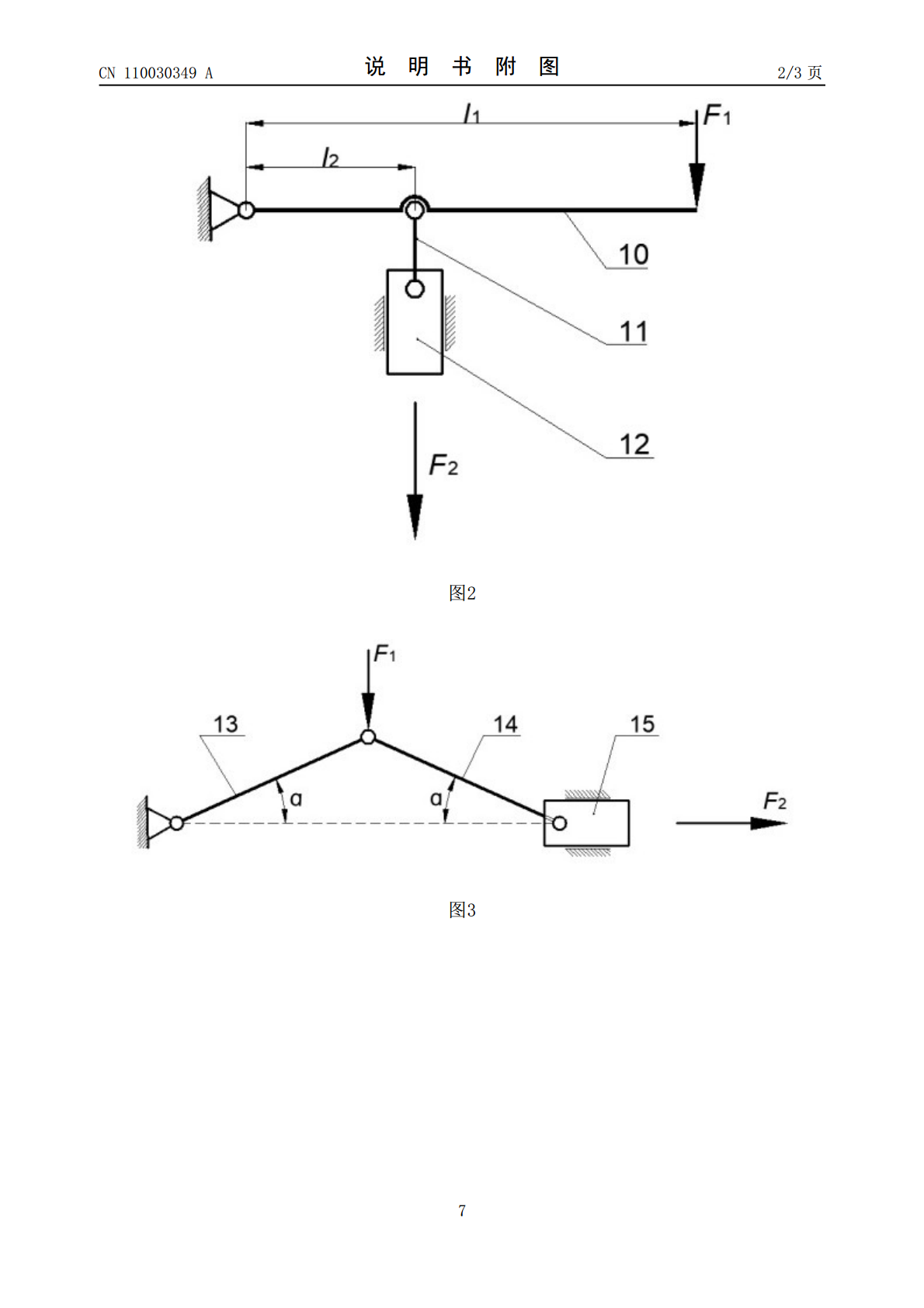
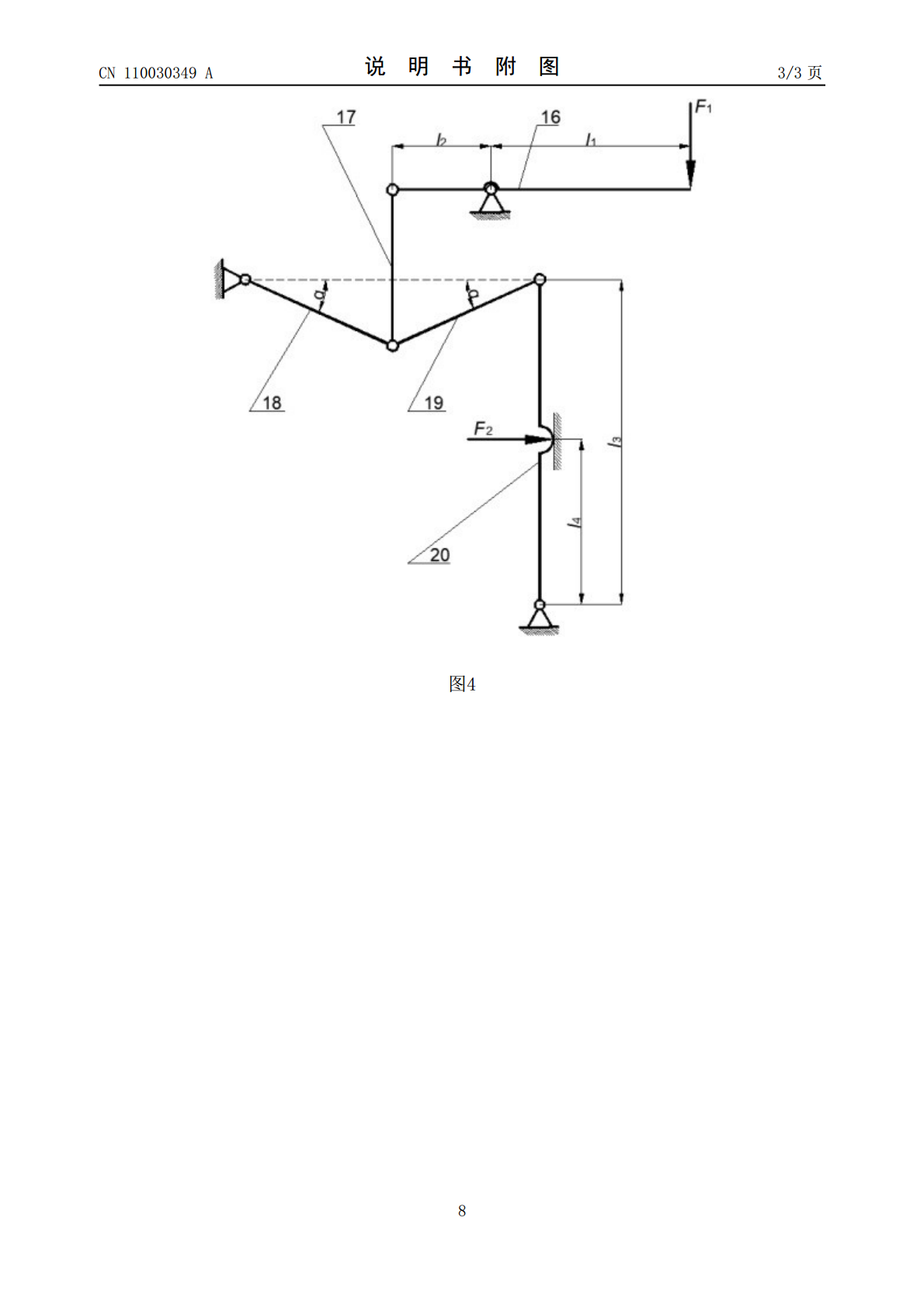
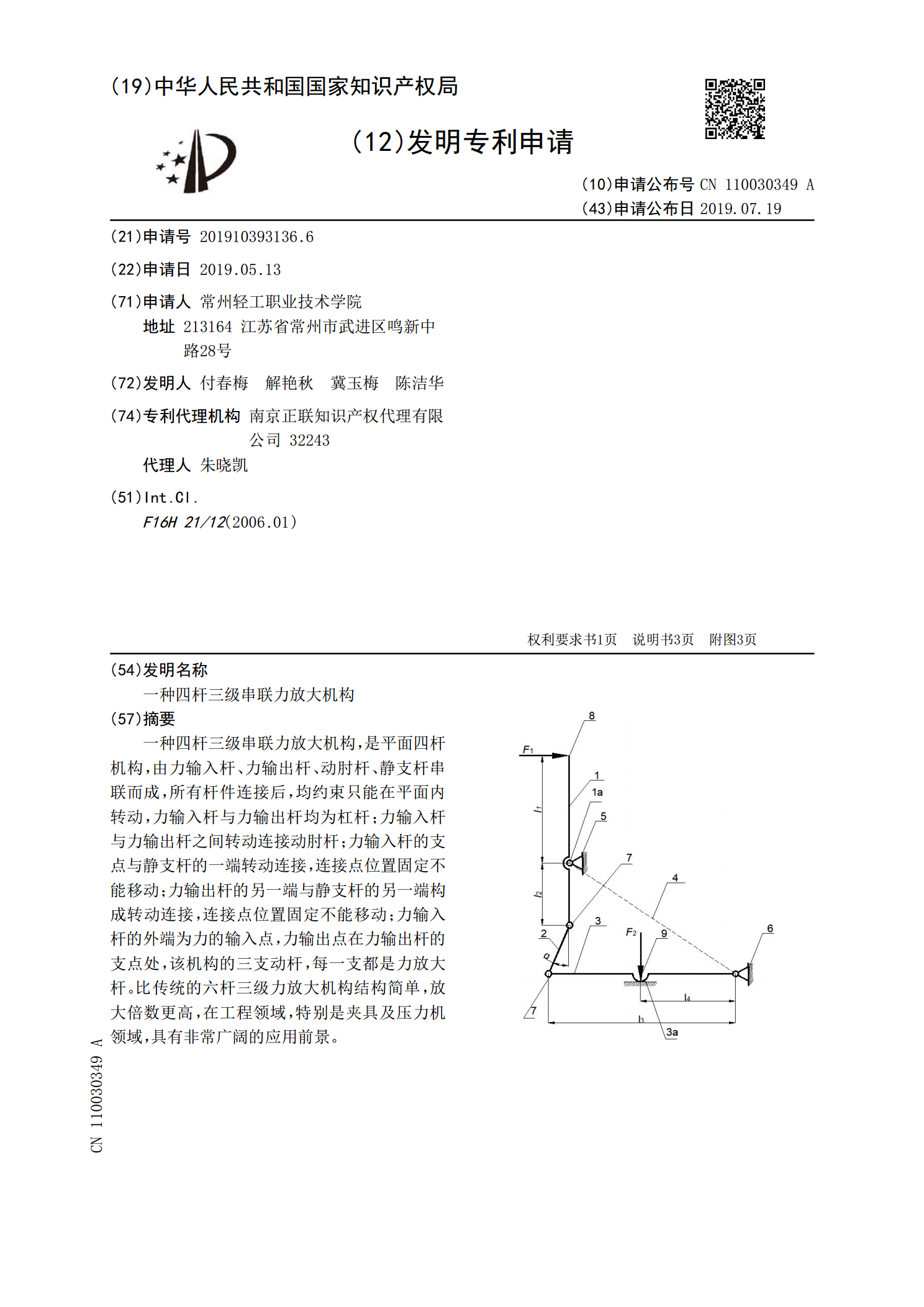
一种四杆三级串联力放大机构,是平面四杆机构,由力输入杆、力输出杆、动肘杆、静支杆串联而成,所有杆件连接后,均约束只能在平面内转动,力输入杆与力输出杆均为杠杆;力输入杆与力输出杆之间转动连接动肘杆;力输入杆的支点与静支杆的一端转动连接,连接点位置固定不能移动;力输出杆的另一端与静支杆的另一端构成转动连接,连接点位置固定不能移动;力输入杆的外端为力的输入点,力输出点在力输出杆的支点处,该机构的三支动杆,每一支都是力放大杆。比传统的六杆三级力放大机构结构简单,放大倍数更高,在工程领域,特别是夹具及压力机领域,具

一种串联液压缸直立灯杆机构.pdf
一种串联液压缸直立灯杆机构,涉及伸缩灯杆技术领域,包括可伸缩的预设级数的灯杆,液压油缸A和分别驱动其他灯杆升降的液压油缸B,所述液压油缸A和液压油缸B固定于灯杆外部;所述液压油缸B包括缸筒、挡板、活塞杆以及固定在活塞杆底部的活塞,所述活塞杆包括外层空心活塞杆以及内层空心活塞杆,外层空心活塞杆与内层空心活塞杆之间留有间隙Ⅰ,所述活塞为空心结构,所述活塞上部与缸筒内壁之间留有间隙Ⅱ,所述内层空心活塞杆贯穿活塞内孔,所述活塞上部与内层空心活塞杆外壁之间留有与间隙Ⅰ连通的间隙Ⅲ,这种串联液压缸直立灯杆机构,整体结
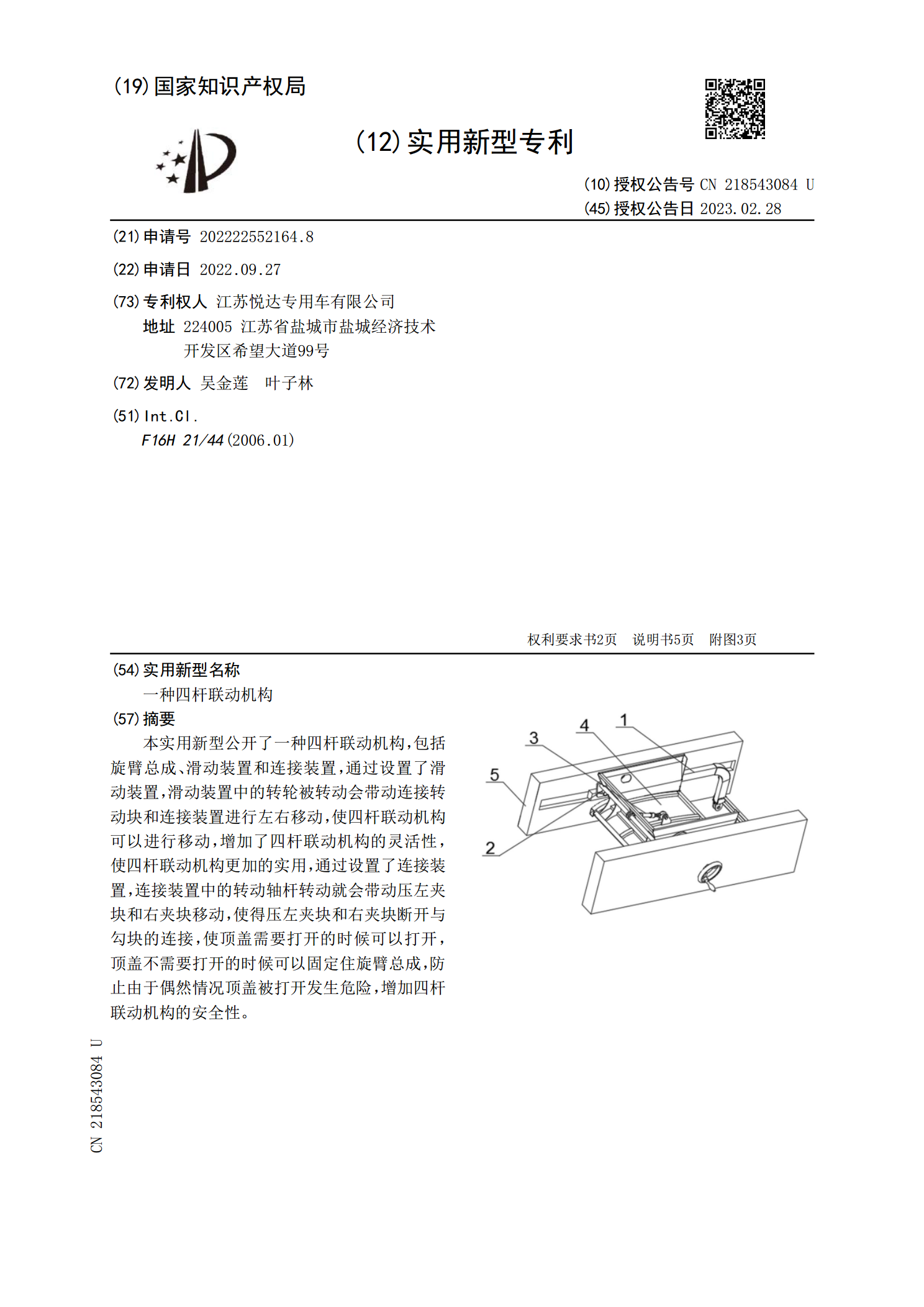
一种四杆联动机构.pdf
本实用新型公开了一种四杆联动机构,包括旋臂总成、滑动装置和连接装置,通过设置了滑动装置,滑动装置中的转轮被转动会带动连接转动块和连接装置进行左右移动,使四杆联动机构可以进行移动,增加了四杆联动机构的灵活性,使四杆联动机构更加的实用,通过设置了连接装置,连接装置中的转动轴杆转动就会带动压左夹块和右夹块移动,使得压左夹块和右夹块断开与勾块的连接,使顶盖需要打开的时候可以打开,顶盖不需要打开的时候可以固定住旋臂总成,防止由于偶然情况顶盖被打开发生危险,增加四杆联动机构的安全性。

一种四排杆定位机构.pdf
本发明提供了一种四排杆定位机构,其可将马达定子精确定位于循环轨道的对应位置的各个工位。两段弧形轨道的首尾分别与对应侧的两端直线轨道的对应段相接、形成跑道型轨道结构,跑道型轨道结构的内侧设置有同步带,同步带的外侧均布固装有若干个治具支承座,治具支承座的底部限位卡装于跑道型轨道结构的轨道边,跑道型轨道结构支承于机座框架,每段平行的直线轨道的外侧分别设置有两个凸轮随动器,凸轮随动器包括一段平行于直线轨道的转轴,转轴上固装有一个凸轮驱动结构、以及至少一个凸轮定位结构,凸轮驱动结构的下端外接有直线驱动气缸,每个凸轮

一种四连杆剑杆引纬机构.pdf
本发明是一种四连杆剑杆引纬机构,该机构包括主轴,所述主轴连接并驱动一曲柄,所述曲柄通过滚针轴承连接叉形连杆,所述叉形连杆连接并驱动一摇杆往复摆动,所述曲柄、叉形连杆和摇杆组成空间球面四连杆机构,所述摇杆上端连接一连杆的一端,所述连杆的另一端铰接扇形齿轮,摇杆通过连杆带动扇形齿轮左右摆动,所述扇形齿轮上的外弧齿与一齿轮啮合,所述齿轮与剑带轮固定在一起,扇形齿轮通过齿轮驱动剑带轮作往复回转运动,所述剑带轮上设置有剑带,剑带轮带动剑带作往复直线运动。采用本发明技术方案,能使剑杆在运动起始和终了阶段有较多的缓冲,