
一种飞行器模型随机多维振动的降维监测方法.pdf

一只****生物


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种飞行器模型随机多维振动的降维监测方法.pdf
本发明一种飞行器模型随机多维振动的降维监测方法属于飞行器风洞模型振动监测领域,涉及一种应用于支杆尾撑式飞行器模型风洞试验的多维振动的降维监测方法。该监测方法中,飞行器模型的多维振动在俯仰平面和偏航平面内解耦,通过设置在多维振动监测系统的加速度传感器,降维表示为两个相互垂直平面上的惯性观测力,在俯仰和偏航平面降维观测所选随机振动的振动特性,实现对飞行器模型的随机多维振动监测。本发明提出的监测方法提高了测量的精确度,此观测方法可行性高、适应性强,能够应用于快速发展的飞行器风洞模拟试验中。
支杆尾撑式飞行器模型多维振动控制方法.pdf
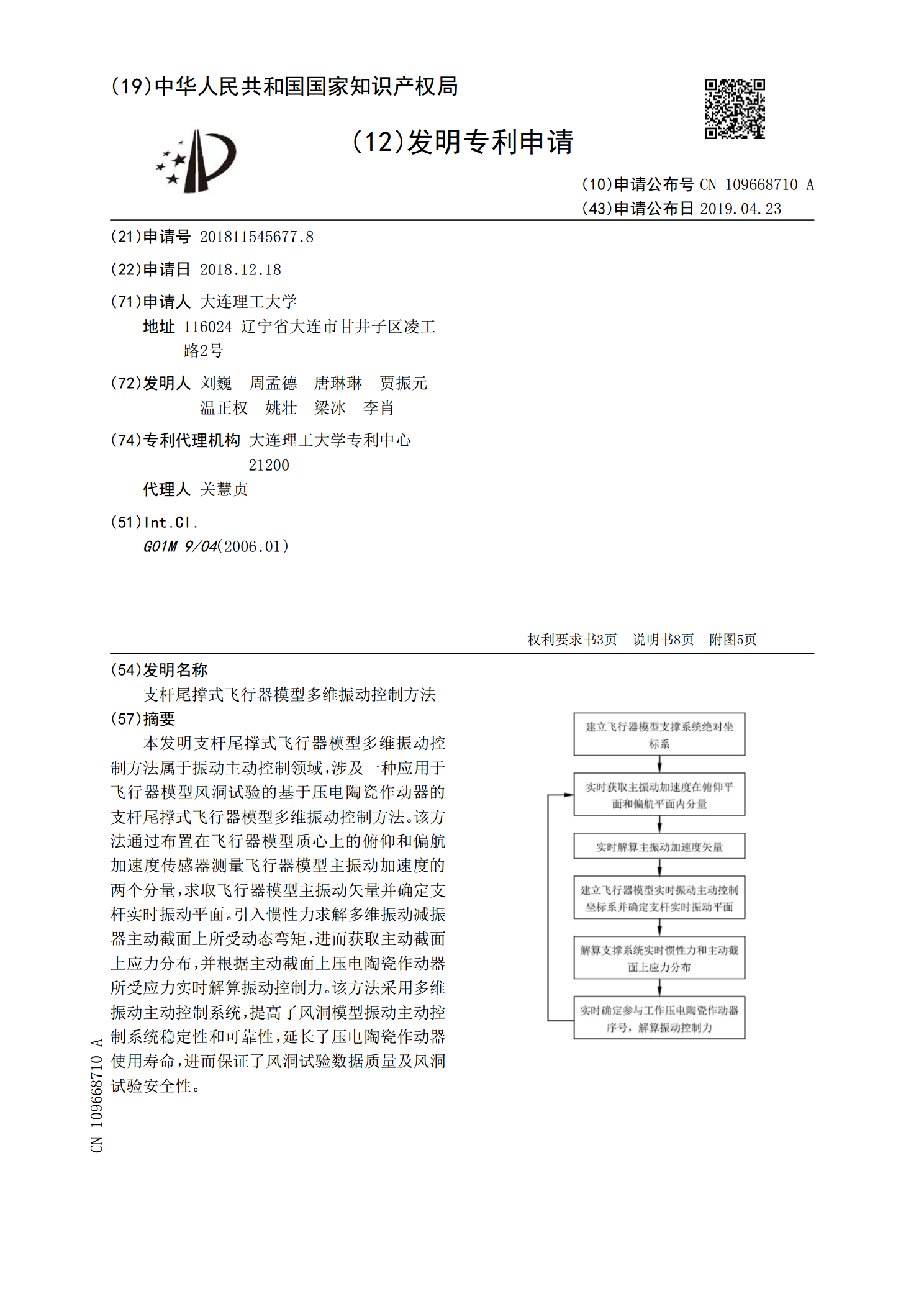
本发明支杆尾撑式飞行器模型多维振动控制方法属于振动主动控制领域,涉及一种应用于飞行器模型风洞试验的基于压电陶瓷作动器的支杆尾撑式飞行器模型多维振动控制方法。该方法通过布置在飞行器模型质心上的俯仰和偏航加速度传感器测量飞行器模型主振动加速度的两个分量,求取飞行器模型主振动矢量并确定支杆实时振动平面。引入惯性力求解多维振动减振器主动截面上所受动态弯矩,进而获取主动截面上应力分布,并根据主动截面上压电陶瓷作动器所受应力实时解算振动控制力。该方法采用多维振动主动控制系统,提高了风洞模型振动主动控制系统稳定性和可靠

基于分形模型的多维空间降维研究.docx
基于分形模型的多维空间降维研究随着科技的不断发展,数据量的增大成为了许多学科研究以及企业实践所需要面对的问题。其中,高维数据的特点使得它们难以被理解以及处理。这时,降维技术便被广泛应用起来,通过减少数据维度来简化数据量以及处理难度。然而,单一的降维算法往往难以适应高纬度数据的特点,使得这方面的研究也日趋多样化与深入。近年来,分形模型在多维空间降维方面的应用逐渐成为了研究的热点。分形模型是指在自相似的基础上逐渐增大或缩小尺度,从而形成复杂纹理或形态的数学模型。多维空间中的分形模型可以通过基于嵌套中心点的递归

一种基于三维模型的数据降维方法.docx
一种基于三维模型的数据降维方法基于三维模型的数据降维方法摘要:在当前大数据时代,数据的规模和复杂性不断增加,数据降维成为了一项重要的任务。本论文提出了一种基于三维模型的数据降维方法,该方法通过将三维模型转化为一组经过优化的特征向量,实现了对三维模型数据的高效降维。实验结果表明,该方法在保持重要信息的同时,能够有效地减少数据维度,提高数据处理速度和存储效率。关键词:数据降维,三维模型,特征向量1.引言随着科技的不断进步,各行各业都产生着大量的数据,这些数据往往是高维的、复杂的。高维数据不仅占用了大量的存储空

飞行器轨迹优化的造型降维方法.docx
飞行器轨迹优化的造型降维方法飞行器轨迹优化的造型降维方法随着人们对飞行器精度要求和能源效率的不断提高,飞行器轨迹优化技术逐渐成为航空领域中一个研究热点。与此同时,为了优化飞行器轨迹设计,常常需要对其造型进行降维处理,以便更好地进行计算和分析。这篇论文将介绍一种新的飞行器轨迹优化的造型降维方法。首先,我们需要先了解什么是飞行器的轨迹优化。飞行器的轨迹优化是指通过优化飞行器的轨迹,以达到以下目标:最大限度地减少能源消耗、最大程度地提高飞行器航行速度、在保证安全的前提下缩短飞行器的旅行时间等。因此,轨迹的优化决