
支杆尾撑式飞行器模型多维振动控制方法.pdf

小寄****淑k


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
支杆尾撑式飞行器模型多维振动控制方法.pdf
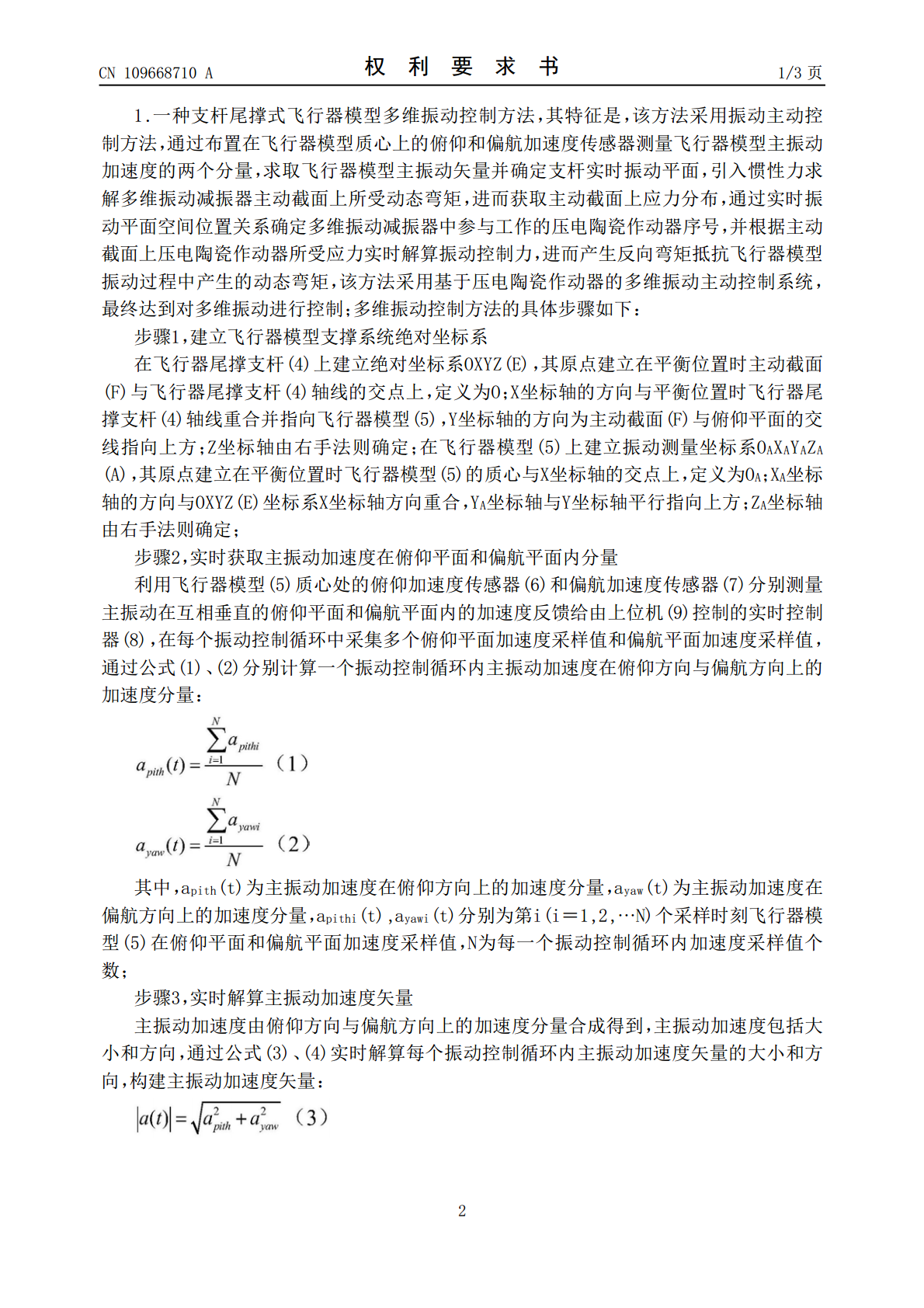
本发明支杆尾撑式飞行器模型多维振动控制方法属于振动主动控制领域,涉及一种应用于飞行器模型风洞试验的基于压电陶瓷作动器的支杆尾撑式飞行器模型多维振动控制方法。该方法通过布置在飞行器模型质心上的俯仰和偏航加速度传感器测量飞行器模型主振动加速度的两个分量,求取飞行器模型主振动矢量并确定支杆实时振动平面。引入惯性力求解多维振动减振器主动截面上所受动态弯矩,进而获取主动截面上应力分布,并根据主动截面上压电陶瓷作动器所受应力实时解算振动控制力。该方法采用多维振动主动控制系统,提高了风洞模型振动主动控制系统稳定性和可靠

基于模型参考自适应控制方法的风洞尾支杆振动主动控制.docx
基于模型参考自适应控制方法的风洞尾支杆振动主动控制基于模型参考自适应控制方法的风洞尾支杆振动主动控制摘要:风洞尾支杆振动是风洞试验中常见的问题之一,会对试验结果产生不良影响。本文基于模型参考自适应控制方法,针对风洞尾支杆振动问题进行研究。首先,建立了尾支杆振动的数学模型,并分析了其特性。然后,设计了模型参考自适应控制器,以实时修正系统的输入信号,以抑制尾支杆振动。最后,利用风洞试验平台进行了仿真实验,并对控制效果进行了评估。结果表明,模型参考自适应控制方法可以有效地抑制风洞尾支杆振动,提高试验结果的准确性

支杆式风洞模型主动振动抑制控制方法研究.docx
支杆式风洞模型主动振动抑制控制方法研究随着现代航空技术的迅速发展,风洞试验作为航空领域重要的实验手段已经成为了航空研究中不可或缺的环节。在风洞试验中,风洞模型主动振动抑制控制技术是一种重要的改善风洞试验精度和可靠性的技术手段。本文将从控制方法入手,对支杆式风洞模型主动振动抑制控制方法进行探讨和研究。一、风洞模型振动控制技术的发展及现状风洞试验作为航空研究的重要手段,对于风洞模型振动控制技术的研究一直是一个热点问题。早期的风洞试验主要采用被动减振的方法,即通过选择合适的支杆材料、缩小结构尺寸、加强模型刚度等

支杆式风洞模型主动振动抑制控制方法研究的任务书.docx
支杆式风洞模型主动振动抑制控制方法研究的任务书一、研究背景及目的如今,风洞实验已经成为空气动力学研究中必不可少的手段。然而,在进行风洞测试过程中,由于模型及支杆的结构等因素的影响,往往会产生不同程度的振动,从而影响到实验结果的准确性与可靠性。因此,针对风洞模型振动抑制控制问题,开展相关的研究,对于提高风洞测试的准确性具有重要的意义。本次研究旨在开发一种针对支杆式风洞模型的主动振动抑制控制方法,通过对风洞模型进行有针对性的控制,最大限度地减小振动干扰,提高实验结果的精确度和可信度,从而推动航空航天等领域的技

支杆式风洞模型主动振动抑制方法与实验研究.docx
支杆式风洞模型主动振动抑制方法与实验研究摘要:本文研究支杆式风洞模型主动振动抑制的方法和实验研究。首先介绍了支杆式风洞模型的基本构造和存在的振动问题,然后针对振动问题提出了多通道PID反馈控制方法,并进行了实验验证。实验结果表明,多通道PID反馈控制方法可以有效抑制支杆式风洞模型的振动。关键词:支杆式风洞;振动抑制;多通道PID反馈控制;实验研究。一、引言支杆式风洞是进行流场模拟和气动试验的重要实验设备。然而,在高速大气流场中,支杆式风洞模型容易受到风力的干扰,导致模型振动过大,影响试验结果的精度和可靠性