
低速风洞模型尾撑地效试验地板槽口随动密封系统及方法.pdf

山梅****ai


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
低速风洞模型尾撑地效试验地板槽口随动密封系统及方法.pdf
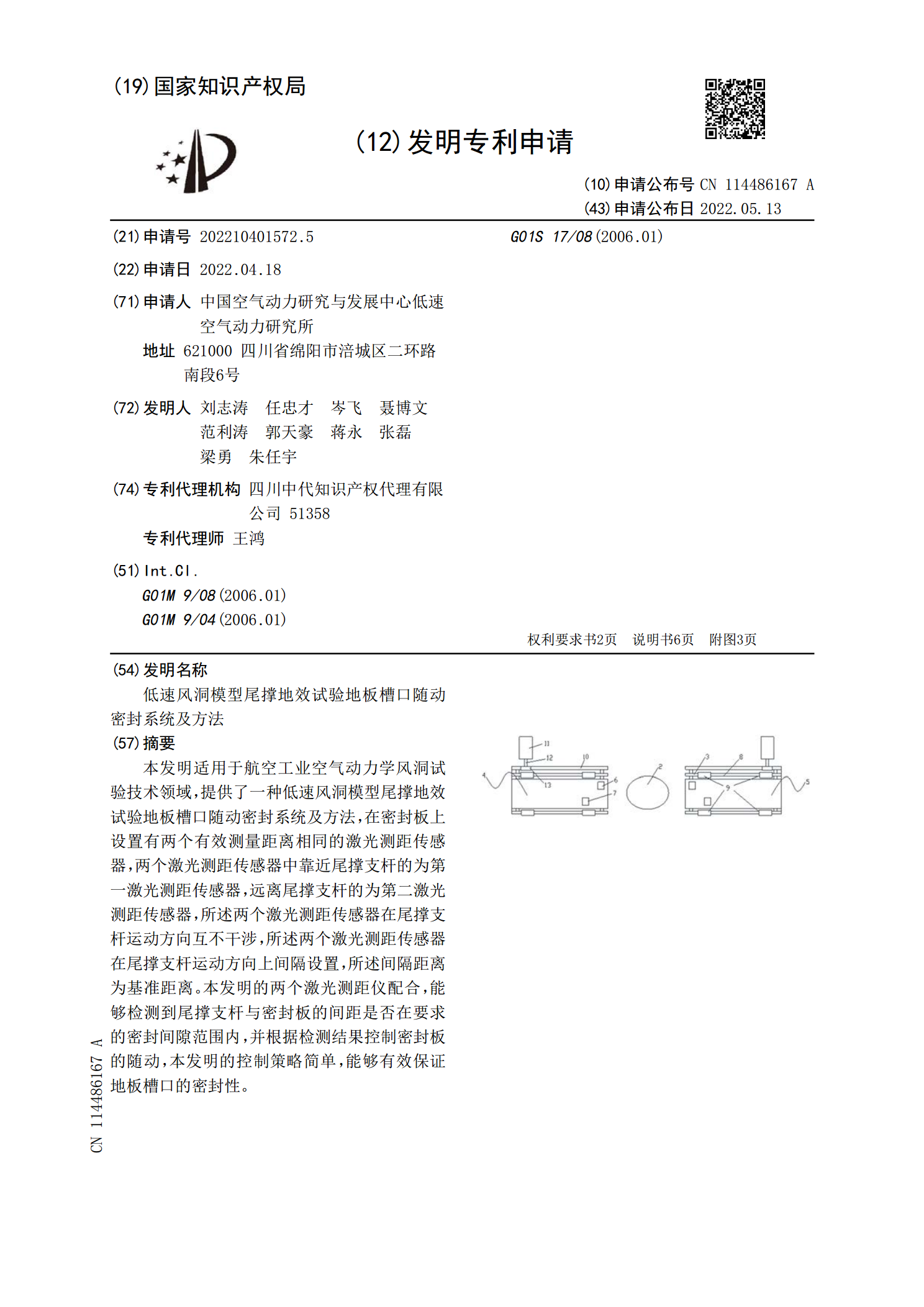
本发明适用于航空工业空气动力学风洞试验技术领域,提供了一种低速风洞模型尾撑地效试验地板槽口随动密封系统及方法,在密封板上设置有两个有效测量距离相同的激光测距传感器,两个激光测距传感器中靠近尾撑支杆的为第一激光测距传感器,远离尾撑支杆的为第二激光测距传感器,所述两个激光测距传感器在尾撑支杆运动方向互不干涉,所述两个激光测距传感器在尾撑支杆运动方向上间隔设置,所述间隔距离为基准距离。本发明的两个激光测距仪配合,能够检测到尾撑支杆与密封板的间距是否在要求的密封间隙范围内,并根据检测结果控制密封板的随动,本发明的
一种俯仰机构的低速风洞尾撑模型试验准备方法及装置.pdf
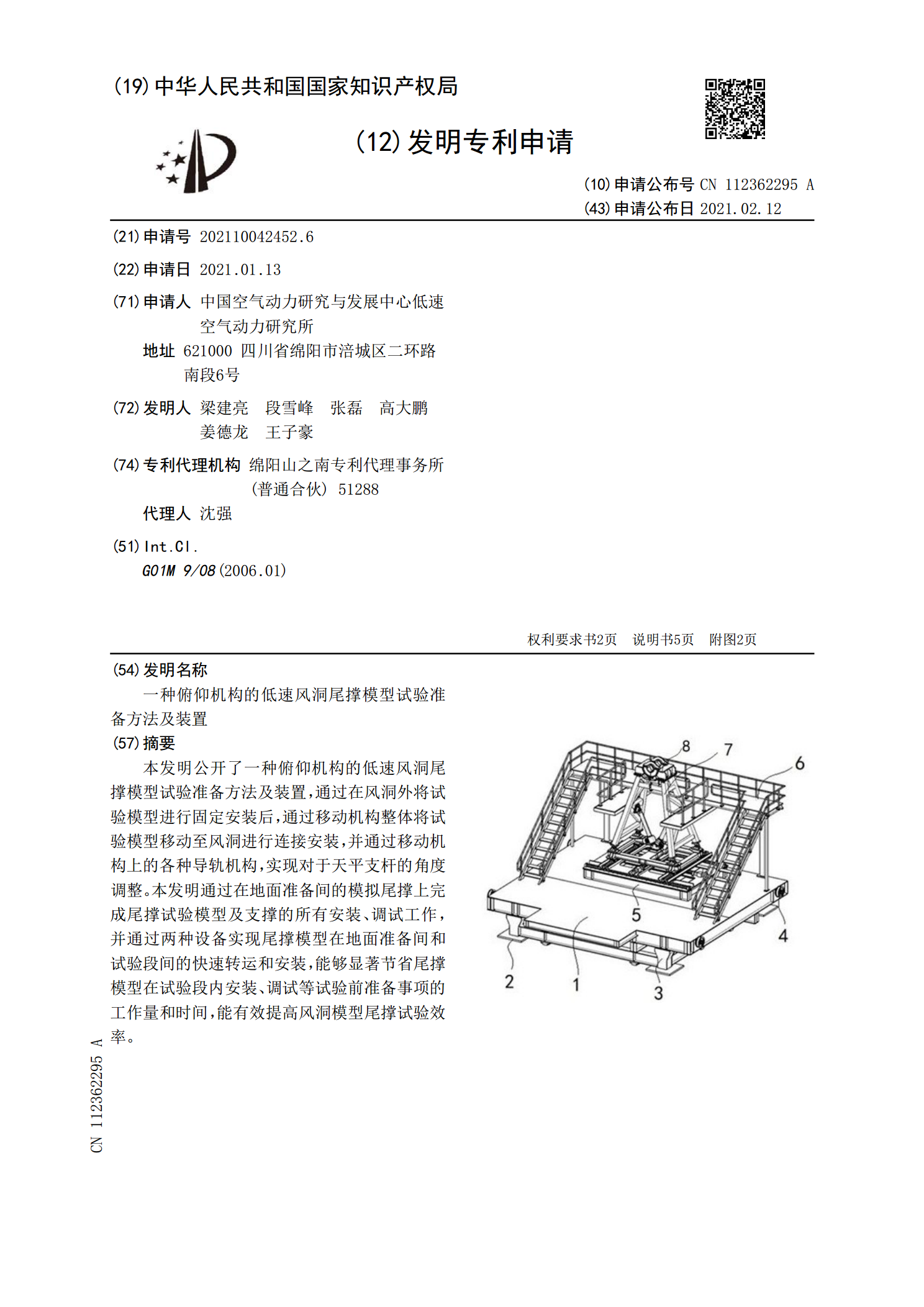
本发明公开了一种俯仰机构的低速风洞尾撑模型试验准备方法及装置,通过在风洞外将试验模型进行固定安装后,通过移动机构整体将试验模型移动至风洞进行连接安装,并通过移动机构上的各种导轨机构,实现对于天平支杆的角度调整。本发明通过在地面准备间的模拟尾撑上完成尾撑试验模型及支撑的所有安装、调试工作,并通过两种设备实现尾撑模型在地面准备间和试验段间的快速转运和安装,能够显著节省尾撑模型在试验段内安装、调试等试验前准备事项的工作量和时间,能有效提高风洞模型尾撑试验效率。
俯仰机构的低速风洞尾撑模型滚转角度调节方法及装置.pdf
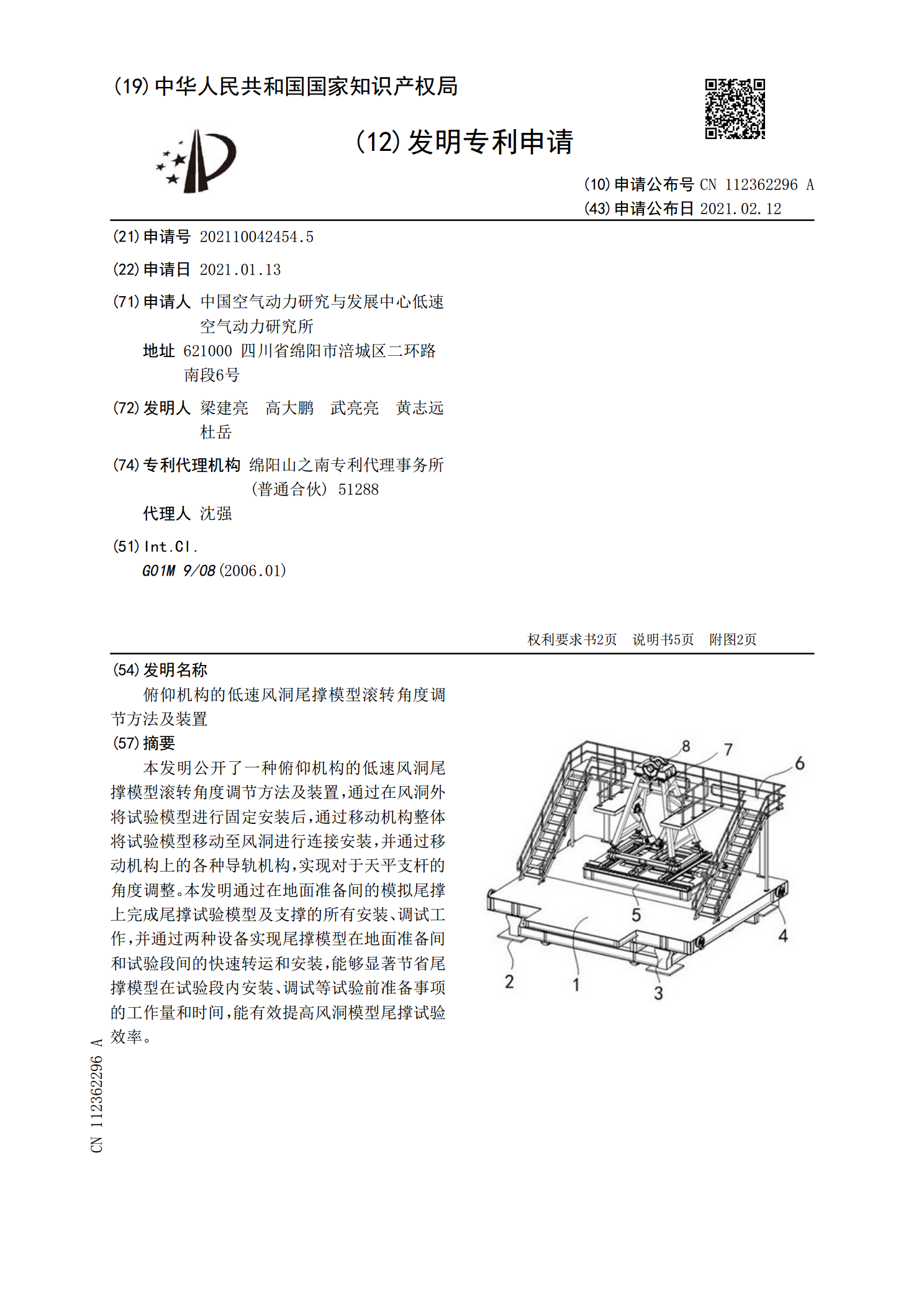
本发明公开了一种俯仰机构的低速风洞尾撑模型滚转角度调节方法及装置,通过在风洞外将试验模型进行固定安装后,通过移动机构整体将试验模型移动至风洞进行连接安装,并通过移动机构上的各种导轨机构,实现对于天平支杆的角度调整。本发明通过在地面准备间的模拟尾撑上完成尾撑试验模型及支撑的所有安装、调试工作,并通过两种设备实现尾撑模型在地面准备间和试验段间的快速转运和安装,能够显著节省尾撑模型在试验段内安装、调试等试验前准备事项的工作量和时间,能有效提高风洞模型尾撑试验效率。
用于风洞尾撑模型振动抑制的磁控约束阻尼系统.pdf
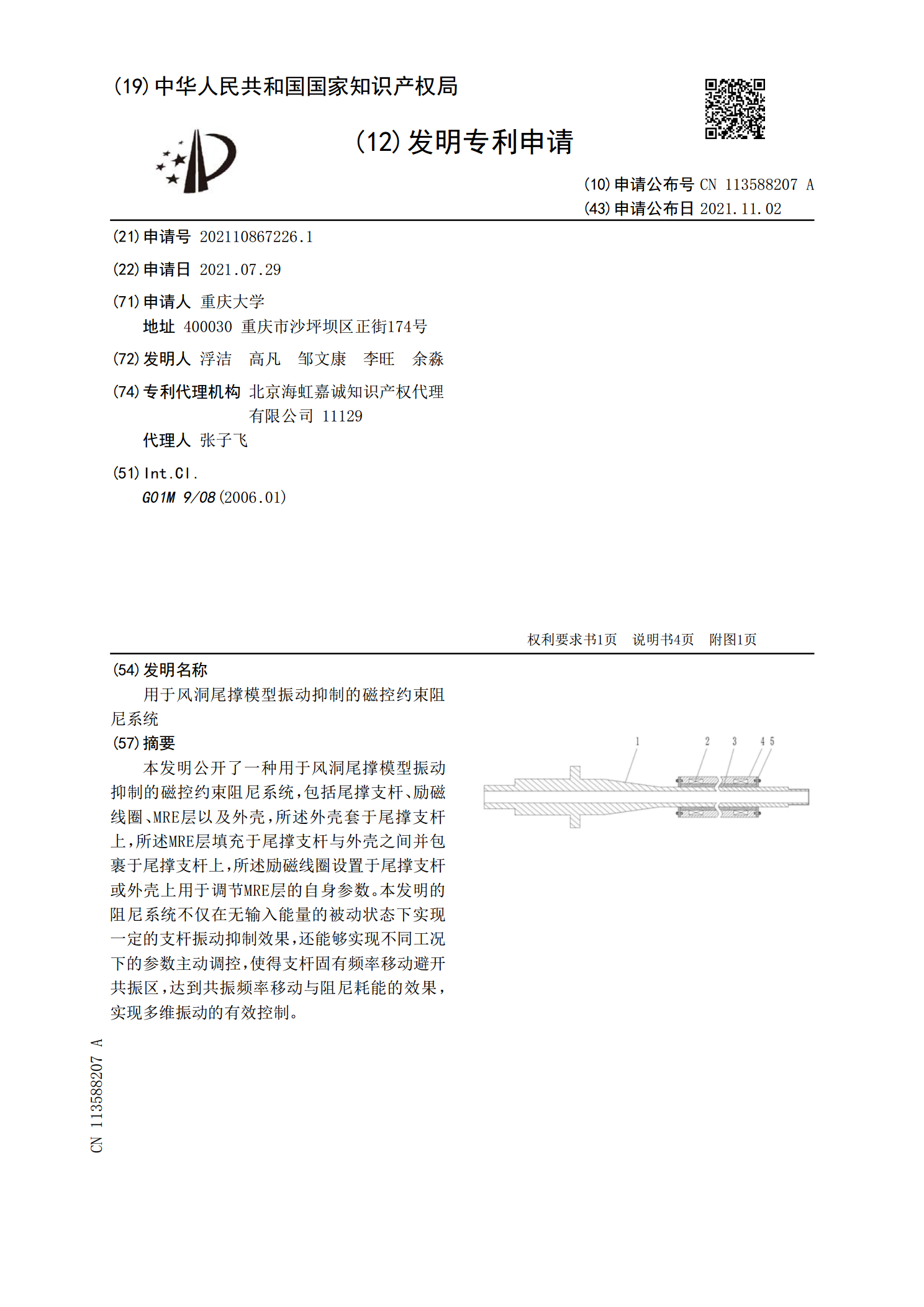
本发明公开了一种用于风洞尾撑模型振动抑制的磁控约束阻尼系统,包括尾撑支杆、励磁线圈、MRE层以及外壳,所述外壳套于尾撑支杆上,所述MRE层填充于尾撑支杆与外壳之间并包裹于尾撑支杆上,所述励磁线圈设置于尾撑支杆或外壳上用于调节MRE层的自身参数。本发明的阻尼系统不仅在无输入能量的被动状态下实现一定的支杆振动抑制效果,还能够实现不同工况下的参数主动调控,使得支杆固有频率移动避开共振区,达到共振频率移动与阻尼耗能的效果,实现多维振动的有效控制。

低速风洞试验腹撑支架干扰分析.docx
低速风洞试验腹撑支架干扰分析低速风洞试验腹撑支架干扰分析摘要:腹撑支架(bellyfairingstrut)是低速风洞试验中常用的辅助设备,用于模拟实际飞行器腹鳍的结构特征。然而,在进行低速风洞试验时,腹撑支架对气流的干扰往往不能忽视。本论文通过理论分析和实验验证的方法,对低速风洞试验中腹撑支架的干扰进行了研究和分析,并提出了相应的改进方案。引言:低速风洞试验是飞行器设计和研发的重要环节,通过模拟实际飞行的各种情况,对飞行器的气动特性进行研究。为了准确模拟实际飞行中的腹鳍结构,研究人员在低速风洞试验中往往