
基于激光雷达点云的无人控制方法、系统及效能评估方法.pdf

书生****aa

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于激光雷达点云的无人控制方法、系统及效能评估方法.pdf
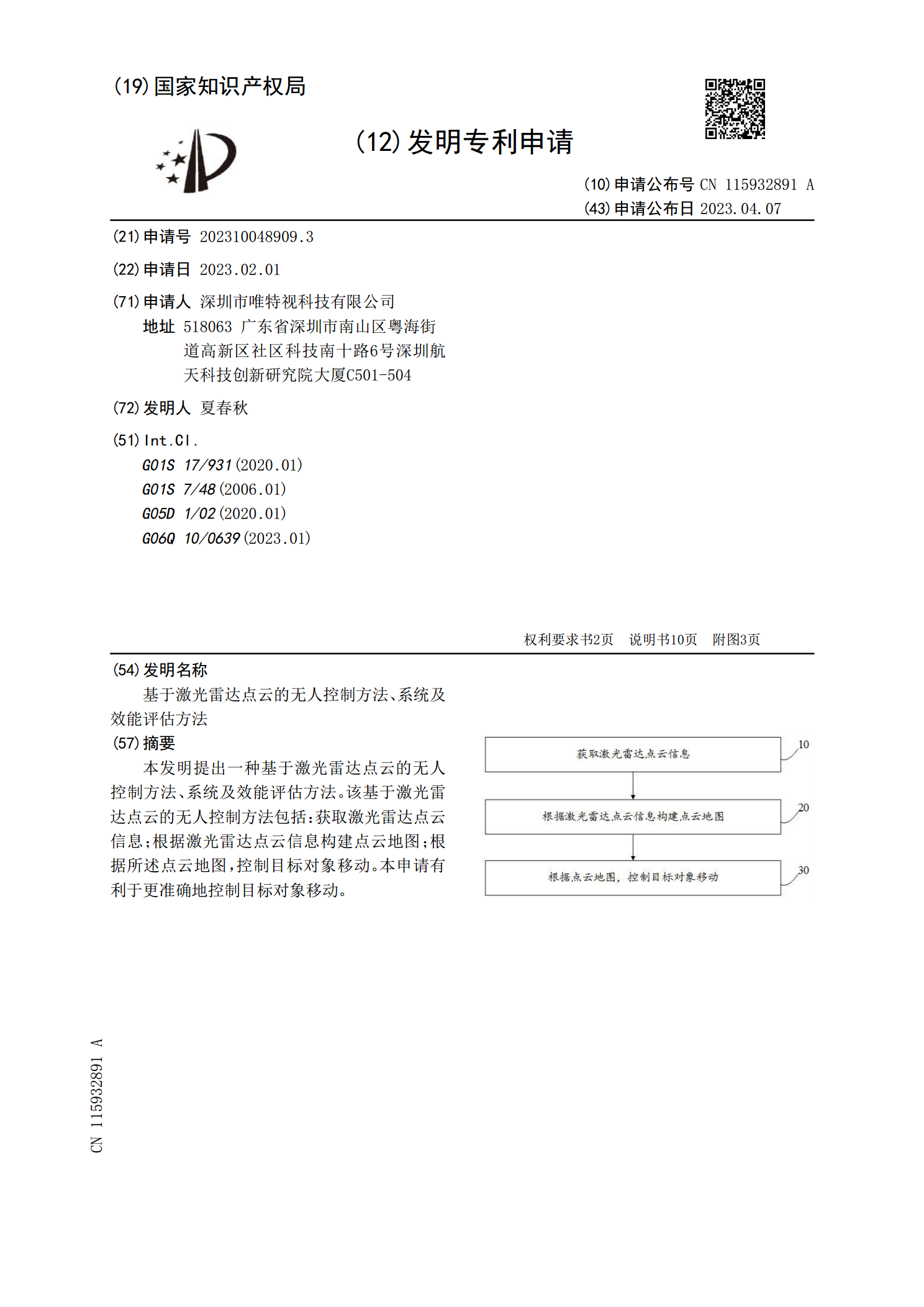
本发明提出一种基于激光雷达点云的无人控制方法、系统及效能评估方法。该基于激光雷达点云的无人控制方法包括:获取激光雷达点云信息;根据激光雷达点云信息构建点云地图;根据所述点云地图,控制目标对象移动。本申请有利于更准确地控制目标对象移动。
激光雷达点云质量评估方法、系统及装置.pdf
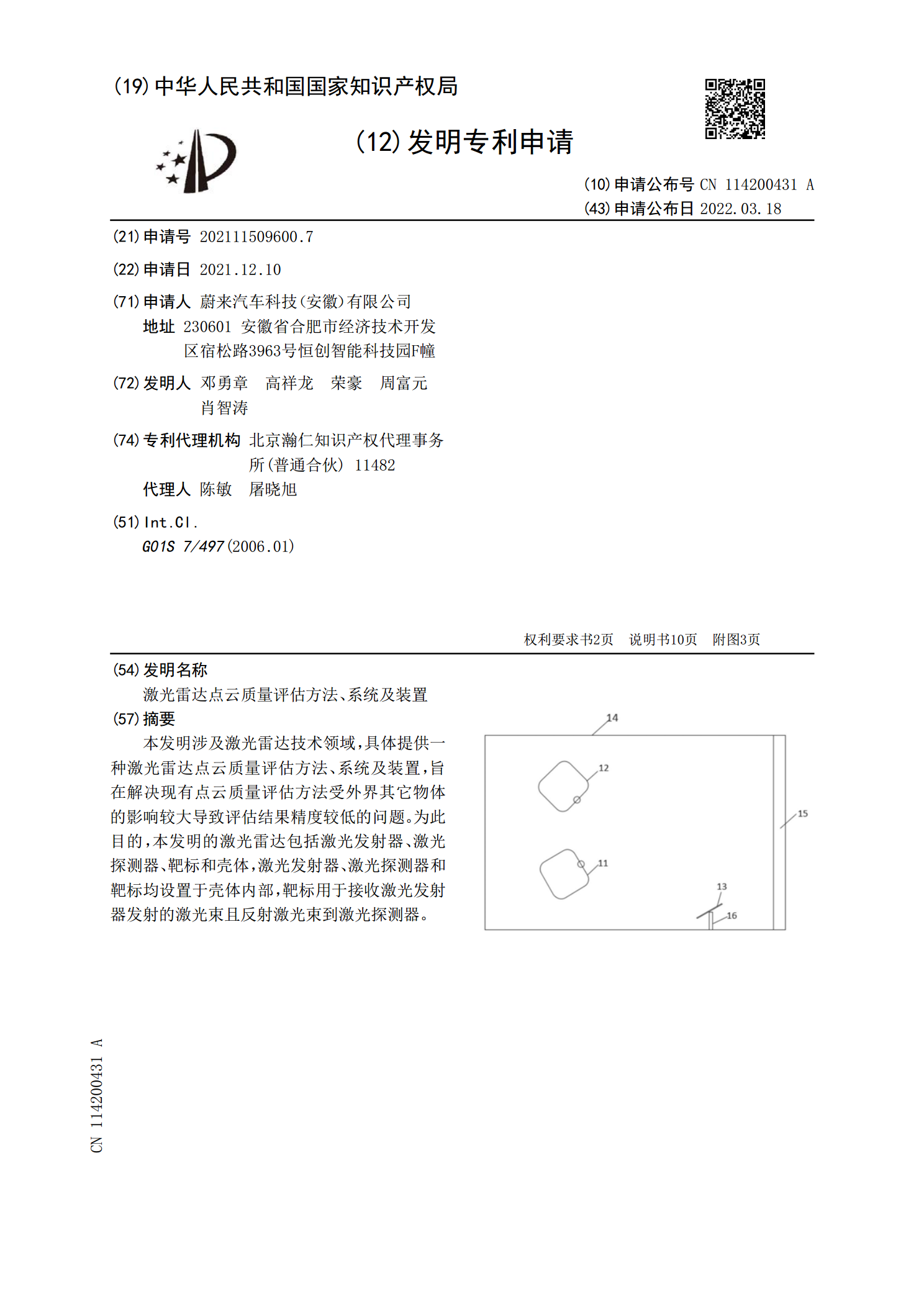
本发明涉及激光雷达技术领域,具体提供一种激光雷达点云质量评估方法、系统及装置,旨在解决现有点云质量评估方法受外界其它物体的影响较大导致评估结果精度较低的问题。为此目的,本发明的激光雷达包括激光发射器、激光探测器、靶标和壳体,激光发射器、激光探测器和靶标均设置于壳体内部,靶标用于接收激光发射器发射的激光束且反射激光束到激光探测器。

一种无人机激光雷达系统的点云去噪方法.docx
一种无人机激光雷达系统的点云去噪方法无人机激光雷达系统(LiDAR)是一种广泛应用于地质测绘、地形测量、环境监测等领域的三维传感技术。由于其高精度、高效率、高分辨率等特点,LiDAR系统在无人机领域中的应用越来越多。但是,由于外部环境的影响,LiDAR系统采集的点云数据往往包含大量的噪声点。在无人机自主飞行、场景重建等应用场景中,噪音点云的存在会严重影响数据的质量和精度,因此点云去噪一直是研究人员和工程师所关注的问题。本文针对无人机激光雷达采集的点云数据,提出了一种新的去噪方法,对点云数据中的噪点进行有效
基于相机图像驱动的激光雷达点云目标检测方法及系统.pdf
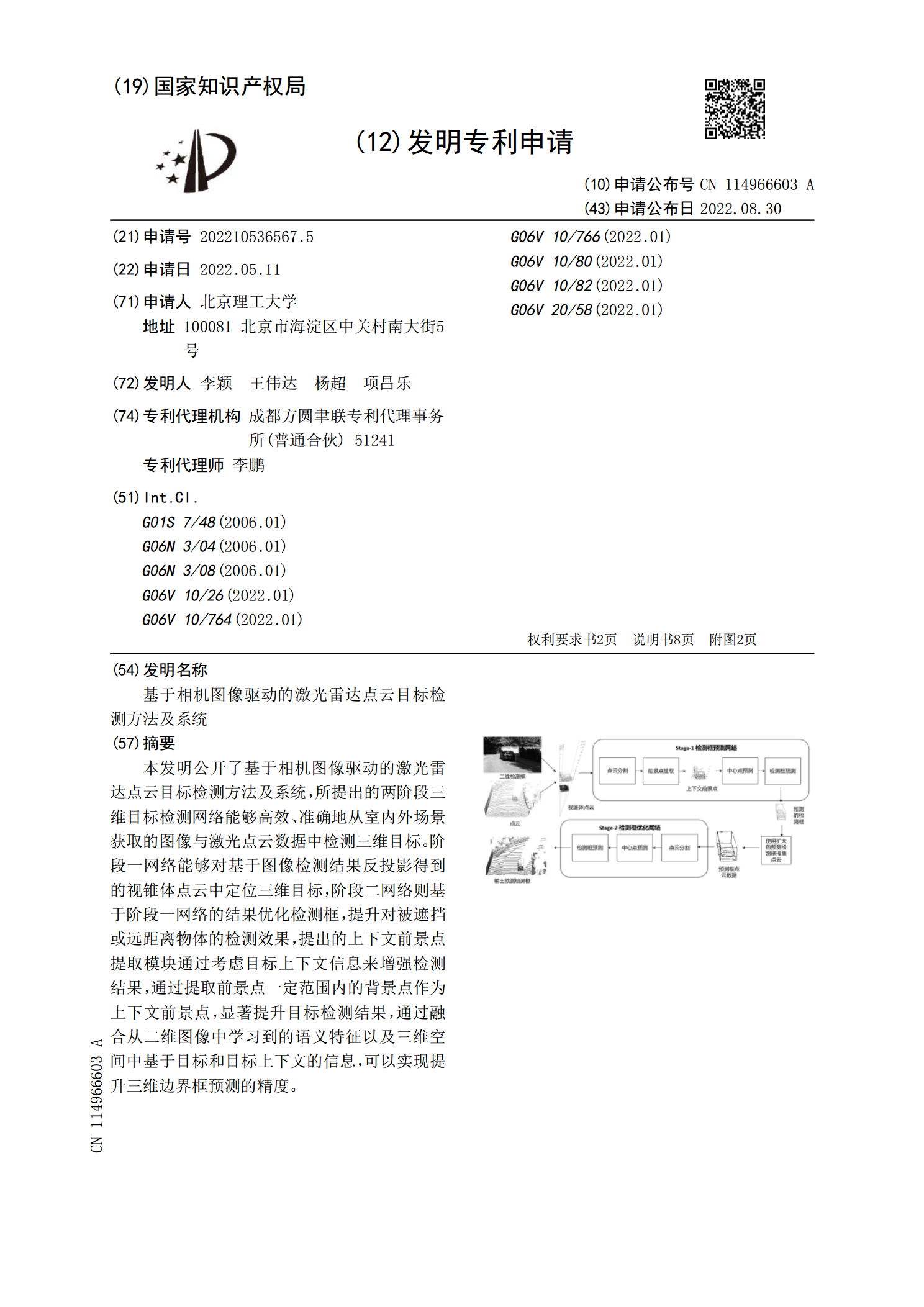
本发明公开了基于相机图像驱动的激光雷达点云目标检测方法及系统,所提出的两阶段三维目标检测网络能够高效、准确地从室内外场景获取的图像与激光点云数据中检测三维目标。阶段一网络能够对基于图像检测结果反投影得到的视锥体点云中定位三维目标,阶段二网络则基于阶段一网络的结果优化检测框,提升对被遮挡或远距离物体的检测效果,提出的上下文前景点提取模块通过考虑目标上下文信息来增强检测结果,通过提取前景点一定范围内的背景点作为上下文前景点,显著提升目标检测结果,通过融合从二维图像中学习到的语义特征以及三维空间中基于目标和目标

一种无人驾驶系统激光雷达连续点云的压缩方法.pdf
本发明涉及点云数据处理技术领域,提出了一种无人驾驶系统激光雷达连续点云的压缩方法,分离出用于表述静态背景的点云,然后提取上述点云变换所反应的车辆本身的运动,得到点云数据;在离线保存点云数据时,对于关键时间点的点云,进行完整保留,关键时间点之后若干帧中的移动目标点云也完整保留,而表述静态背景的点云则删除,得到没有背景的帧;还原时,根据记录的每两个关键时间点时间段内车辆的运动轨迹,使用合成孔径雷达原理对没有背景的帧进行还原。本方法保存点云各帧之间所体现的背景的移动规律,删掉对应的表述静态背景的点云,可以起到在